
实验四
task2.cpp
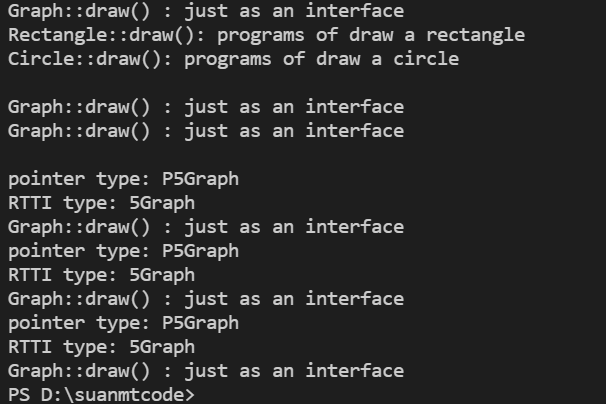
#include <iostream> #include <typeinfo> // definitation of Graph class Graph { public: void draw() { std::cout << "Graph::draw() : just as an interface\n"; } }; // definition of Rectangle, derived from Graph class Rectangle : public Graph { public: void draw() { std::cout << "Rectangle::draw(): programs of draw a rectangle\n"; } }; // definition of Circle, derived from Graph class Circle : public Graph { public: void draw() { std::cout << "Circle::draw(): programs of draw a circle\n"; } }; // definitaion of fun(): as a call interface void fun(Graph *ptr) { std::cout << "pointer type: " << typeid(ptr).name() << "\n"; std::cout << "RTTI type: " << typeid(*ptr).name() << "\n"; ptr -> draw(); } // test int main() { Graph g1; Rectangle r1; Circle c1; // call by object name g1.draw(); r1.draw(); c1.draw(); std::cout << "\n"; // call by object name, and using the scope resolution operator:: r1.Graph::draw(); c1.Graph::draw(); std::cout << "\n"; // call by pointer to Base class fun(&g1); fun(&r1); fun(&c1); }
task2.cpp
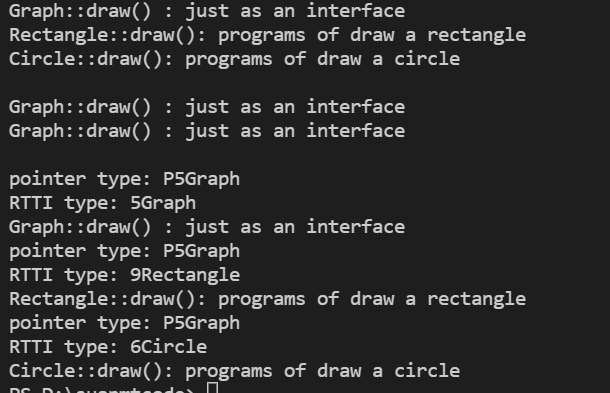
在draw()前加了virtual
#include <iostream> #include <typeinfo> // definitation of Graph class Graph { public: virtual void draw() { std::cout << "Graph::draw() : just as an interface\n"; } }; // definition of Rectangle, derived from Graph class Rectangle : public Graph { public: void draw() { std::cout << "Rectangle::draw(): programs of draw a rectangle\n"; } }; // definition of Circle, derived from Graph class Circle : public Graph { public: void draw() { std::cout << "Circle::draw(): programs of draw a circle\n"; } }; // definitaion of fun(): as a call interface void fun(Graph *ptr) { std::cout << "pointer type: " << typeid(ptr).name() << "\n"; std::cout << "RTTI type: " << typeid(*ptr).name() << "\n"; ptr -> draw(); } // test int main() { Graph g1; Rectangle r1; Circle c1; // call by object name g1.draw(); r1.draw(); c1.draw(); std::cout << "\n"; // call by object name, and using the scope resolution operator:: r1.Graph::draw(); c1.Graph::draw(); std::cout << "\n"; // call by pointer to Base class fun(&g1); fun(&r1); fun(&c1); }
task3
battery.hpp
#include<iostream> #include<string> using namespace std; class Battery { private: int capacity; public: Battery(int cap = 70) :capacity(cap) { } int get_capacity() { return capacity; } };
car.hpp
#include <iostream> #include <string> #include <iomanip> using namespace std; class Car { private: string maker; string model; int years; int odometers; public: Car(string m, string mo, int y, int odo = 0) { maker = m; model = mo; years = y; odometers = odo; } void Info() { cout << "制造商:"<<setw(10)<<maker<<endl; cout << "型号:"<<setw(10)<<model<<endl; cout << "生产年份:"<<setw(10)<<years<<endl; cout << "当前行车里程数:"<<setw(10)<<odometers<<endl; } void update_odometers(int _odometers) { if ( _odometers >= odometers ) { odometers = _odometers; } else { cout << "ERROR!" << endl; } } };
ElectricalCar.hpp
#include "battery.hpp" #include "car.hpp" #include <iostream> using namespace std; class ElectricCar :public Car { private: Battery battery; public: ElectricCar(string ma, string mo, int y, Battery bat=70, int odo = 0) :Car(ma, mo, y, odo), battery(bat) {} void Info() { Car::Info(); cout << "capacity:" << battery.get_capacity() << "-kWh" << endl; } };
task3.cpp
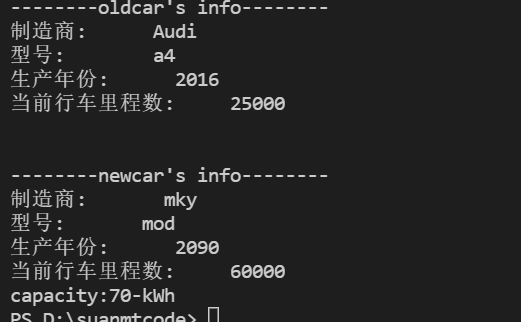
#include <iostream> #include "ElectricCar.hpp" int main() { using namespace std; // test class of Car Car oldcar("Audi", "a4", 2016); cout << "--------oldcar's info--------" << endl; oldcar.update_odometers(25000); oldcar.Info(); cout << endl; // test class of ElectricCar ElectricCar newcar("mky", "mod", 2090); newcar.update_odometers(60000); cout << "\n--------newcar's info--------\n"; newcar.Info(); }
task4
pets.hpp
#include<iostream> #include<iomanip> #include<string> using namespace std; class MachinePets { private: string nickname; public: MachinePets(const string s) { nickname = s; } virtual string talk() { return "lala"; } string get_nickname()const { return nickname; } }; class PetCats :public MachinePets{ public: PetCats(const string s) :MachinePets(s) { } string talk() { return "miao wu~"; } }; class PetDogs :public MachinePets{ public: PetDogs(const string s) :MachinePets(s) { } string talk() { return "wang wang~"; } };
task4.cpp
#include <iostream> #include "pets.hpp" void play(MachinePets *ptr) { std::cout << ptr->get_nickname() << " says " << ptr->talk() << std::endl; } int main() { PetCats cat("miku"); PetDogs dog("da huang"); play(&cat); play(&dog); }

