
雕塑 Sculpture UVA12171
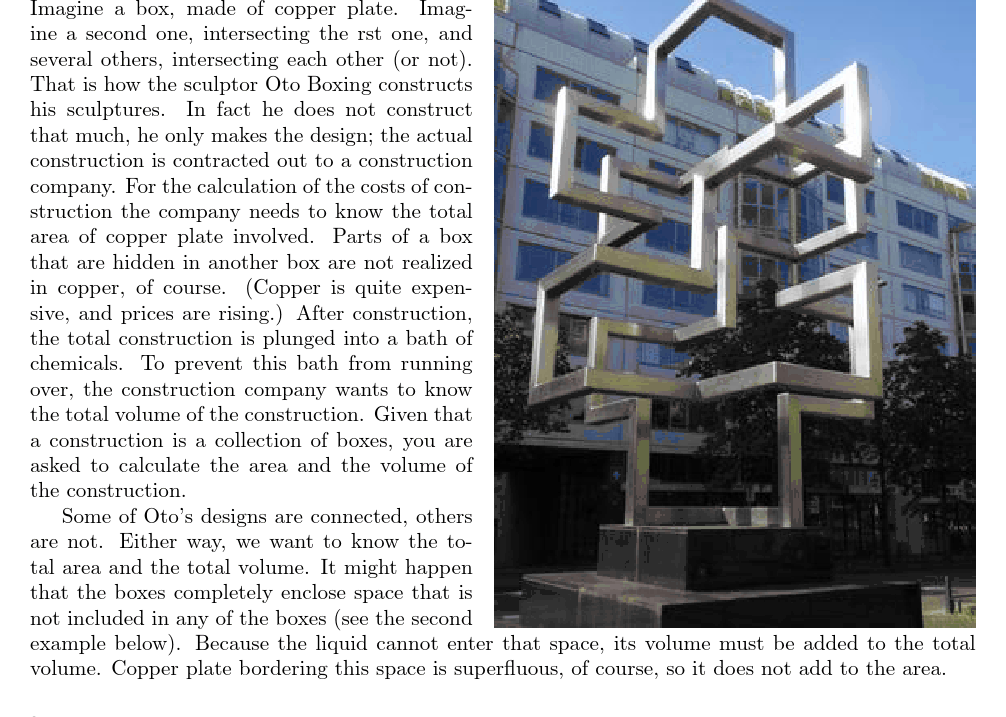
题目描述
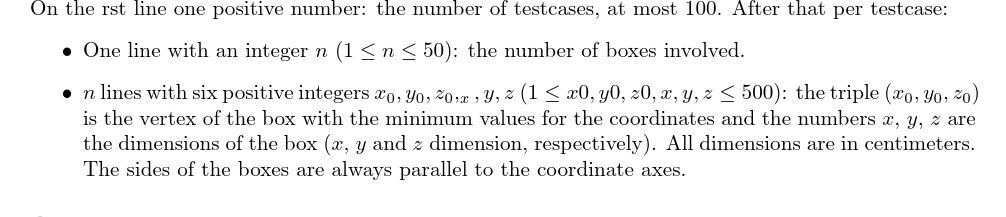
输入描述
输出描述

题目大意
某雕塑由 n (n<=50) 个边平行于坐标轴的长方体组成。
每个长方体用 6 个整数 x0, y0, z0, x, y, z 表示(1<= x0, y0, z0, x, y, z <= 500)。 x0 为长方体顶点中,x 坐标的最小值,x 表示长方体在 x 方向的长度。其他 4 个值类似定义。
统计这个雕像的体积和表面积。注意,雕像内部可能会有密闭的空间,其体积应该算在总体积中。
题目思路
对于这道题来说,离散是需要的,它能够将无穷或者极大转换成有限或者很小,这样能够达到省时间空间的目的。不过我们先不考虑离散,我们就先说floodfill,最后再考虑离散优化,解决题目还是要先考虑主要矛盾的,先从重点开始。
什么是floodfill呢,就是我们将这个雕塑灌空气或水,不管灌什么,能将这个雕塑覆盖满即可,算体积直接从雕塑入手不是一个好办法,所以不妨试一试总的体积减去外围空气的体积,这样间接的方法能帮助我们进行计算里面的体积了对吧,可以形象的考虑这个问题相当于将一个不规则的物体浸入水中(空气中)。那么我们怎么算外围空气的体积呢,用bfs就行,bfs什么呢,我们从一个个小单位的块来考虑,要dfs就需要将它四周的遍历进去,一共有xyz三个轴6个方向,然后看看是不是空气还是物体就行,那么怎么表示物(空气雕塑)块呢,我们用一个点来表示,那就是这个物块xyz最小值来代表整个。
下面说一说离散,为什么用离散,原因就是物块所在的空间位置太大了,500*500*500可不行啊,于是我们将大的位置与离散后的位置对应起来,所以在表示物块位置的时候用离散后的坐标来表示,在算体积与表面积时在对应后计算,尽量将离散前的大坐标位置不参与过多的计算,会耗费时空。
/* Sculpture (UVa12171) */ #include <iostream> #include <cstring> #include <algorithm> #include <queue> using namespace std; const int maxn = 105; const int maxr = 1005; int dx[] = {1, -1, 0, 0, 0, 0}; int dy[] = {0, 0, 1, -1, 0, 0}; int dz[] = {0, 0, 0, 0, 1, -1}; struct Point { int x, y, z; Point(int x, int y, int z) : x(x), y(y), z(z) {} Point() {} }; Point p[maxn]; int x[maxn], y[maxn], z[maxn]; //离散化后的坐标轴 int a[maxn][maxn][maxn]; //离散坐标系 int vis[maxn][maxn][maxn]; //标记是否访问 int n, nx, ny, nz; //数据量以及离散坐标轴的长度 int v, s; void input(); //输入 void build(); //填格子 void bfs(); //广搜求 v 和 s int getArea(int tx, int ty, int tz, int dir); //计算 tx ty tz 长方体在 dir 方向上的面积(与空气的接触面积) int main() { //freopen("input.txt", "r", stdin); int T; cin >> T; while (T--) { input(); build(); bfs(); cout << s << " " << v << endl; } } void input() { memset(a, 0, sizeof(a)); memset(vis, 0, sizeof(vis)); v = 0; s = 0; cin >> n; for (int i = 1; i <= 2 * n; i += 2) { cin >> p[i].x >> p[i].y >> p[i].z; cin >> p[i + 1].x >> p[i + 1].y >> p[i + 1].z; p[i + 1].x += p[i].x; p[i + 1].y += p[i].y; p[i + 1].z += p[i].z; //算出坐标 x[i] = p[i].x; y[i] = p[i].y; z[i] = p[i].z; x[i + 1] = p[i + 1].x; y[i + 1] = p[i + 1].y; z[i + 1] = p[i + 1].z; } x[0] = 0; y[0] = 0; z[0] = 0; //将坐标轴排序去重 sort(x, x + 2 * n + 1); sort(y, y + 2 * n + 1); sort(z, z + 2 * n + 1); nx = unique(x, x + 2 * n + 1) - x; ny = unique(y, y + 2 * n + 1) - y; nz = unique(z, z + 2 * n + 1) - z; //在周围围上空气 x[nx++] = maxr; y[ny++] = maxr; z[nz++] = maxr; } void build() { for (int i = 1; i <= 2 * n; i++) { int x1, x2, y1, y2, z1, z2; //长方体在离散化后的坐标系中的位置 x1 = lower_bound(x, x + nx, p[i].x) - x; x2 = lower_bound(x, x + nx, p[i + 1].x) - x; y1 = lower_bound(y, y + ny, p[i].y) - y; y2 = lower_bound(y, y + ny, p[i + 1].y) - y; z1 = lower_bound(z, z + nz, p[i].z) - z; z2 = lower_bound(z, z + nz, p[i + 1].z) - z; for (int i = x1; i < x2; i++) //左闭右开区间填格子 for (int j = y1; j < y2; j++) for (int k = z1; k < z2; k++) a[i][j][k] = 1; } } void bfs() { queue<Point> q; q.push(Point(0, 0, 0)); vis[0][0][0] = 1; while (!q.empty()) { Point t = q.front(); q.pop(); //如果这一点为空气,则累加空气体积 if (a[t.x][t.y][t.z] == 0) v += (x[t.x + 1] - x[t.x]) * (y[t.y + 1] - y[t.y]) * (z[t.z + 1] - z[t.z]); for (int i = 0; i < 6; i++) { int tx, ty, tz; //与 t 点相邻的点 tx = t.x + dx[i]; ty = t.y + dy[i]; tz = t.z + dz[i]; if (tx < 0 || tx >= nx - 1 || ty < 0 || ty >= ny - 1 || tz < 0 || tz >= nz - 1) //过滤掉出界的情况 continue; if (a[tx][ty][tz] == 1) { //为长方体,则计算接触面积并累加 s += getArea(tx, ty, tz, i); } else if (a[tx][ty][tz] == 0 && vis[tx][ty][tz] == 0) { //为空气并且没访问过,则加入队列 q.push(Point(tx, ty, tz)); vis[tx][ty][tz] = 1; } } } v = maxr * maxr * maxr - v; } int getArea(int tx, int ty, int tz, int dir) { //不同方向的接触面,面积不同 if (dx[dir] != 0) { return (y[ty + 1] - y[ty]) * (z[tz + 1] - z[tz]); } else if (dy[dir] != 0) { return (x[tx + 1] - x[tx]) * (z[tz + 1] - z[tz]); } else { return (x[tx + 1] - x[tx]) * (y[ty + 1] - y[ty]); } }
转载请注明出处:https://www.cnblogs.com/stu-jyj3621

 浙公网安备 33010602011771号
浙公网安备 33010602011771号