
【具身智能科普】表格分析核心概念、技术体系、应用场景落地、商业化等 - 指南
文章目录
前言
若对您有帮助的话,请点赞收藏加关注哦,您的关注是我持续创作的动力!有问题请私信或联系邮箱:funian.gm@gmail.com
一、具身智能核心概念深度解析
1.1 本质定义与核心内涵
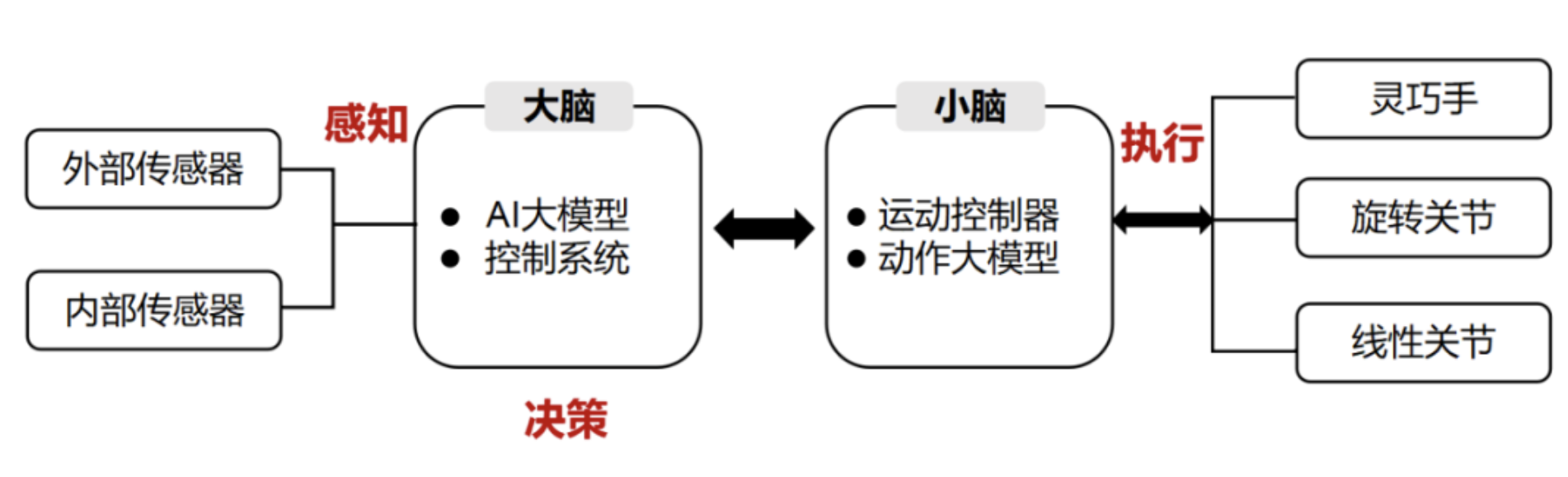
具身智能(Embodied Intelligence)是人工智能的重要分支,其核心本质是让智能体通过物理实体载体与真实环境进行实时、动态的交互,在“感知-决策-行动-反馈”的闭环中持续学习、自适应调整,最终涌现出应对繁琐物理世界任务的智能能力。
实现这一需求的载体。”就是与传统“离身智能”不同,具身智能的核心并非单纯的算法优化,而是强调“智能与物理载体的深度绑定”——智能的产生不仅依赖数据与模型,更依赖于智能体在具体环境中通过“身体”获取的多模态感知信息、执行动作的物理反馈,以及对环境规则的动态适配。正如AI领域专家李飞飞所言:“具身的核心是‘在环境中做事’的需求,身体只
1.2 三大核心要素
具身智能系统必须同时具备以下三大要素,缺一不可:
- 物理实体载体:即智能体的“身体”,是与环境交互的基础。包括硬件结构(如人形机器人的肢体、自动驾驶汽车的车身)和感知/执行模块(如摄像头、力传感器、电机、机械臂等),负责采集环境数据和执行决策指令。
- 智能算法核心:即智能体的“大脑”,负责处理感知数据、解析任务意图、规划动作策略。核心技术包括多模态数据融合、强化学习、大模型意图理解、Sim2Real(仿真到现实迁移)等,是实现智能决策的核心支撑。
- 环境交互能力:即智能体与物理世界的动态互动能力,包括对环境变化的实时响应(如躲避障碍物、适应光照变化)、对动作效果的反馈接收(如抓取物体的力度感知),以及基于反馈的持续优化(如调整焊接参数以提升精度)。
1.3 关键特征
- 实时性:环境交互与决策执行需在毫秒至秒级完成,满足物理世界的动态需求(如自动驾驶的紧急制动、机器人的实时避障)。
- 闭环学习:通过“感知-决策-行动-反馈”的循环的,持续优化算法参数与动作策略,搭建能力进化(如机器人学习抓取不同形状物体的过程)。
- 场景适配性:需适应真实世界的不确定性(如极端天气、动态障碍物、突发状况),而非局限于结构化的理想环境。
- 软硬件协同:算法设计需充分考虑硬件性能约束(如电机扭矩、传感器精度),硬件选型需匹配算法的计算与执行需求,二者深度协同才能实现高效运作。
二、具身智能与传统离身智能核心差异对比
| 对比维度 | 具身智能 | 传统离身智能 | 关键说明 |
|---|---|---|---|
| 存在形式 | 物理实体载体+智能算法 | 纯软件形态 | 具身智能需依赖硬件建立环境交互 |
| 交互方式 | 与物理环境实时动态交互 | 基于数字数据的输入输出 | 前者强调"感知-行动"闭环,后者聚焦数字信息处理 |
| 学习机制 | 从环境反馈中持续进化 | 依赖海量静态数据训练 | 具身智能支持在线学习,传统AI多为离线训练后部署 |
| 核心能力 | 环境适应与行动执行 | 数据处理与信息生成 | 例如:机器人炒菜 vs 文本生成菜谱 |
| 应用场景 | 工业生产、服务机器人、自动驾驶等物理场景 | 文本生成、图像识别、语音助手等数字场景 | 场景差异源于是否得物理世界干预能力 |
| 技术核心 | 多模态感知融合、运动控制、Sim2Real | 模型训练优化、数据预处理、特征提取 | 具身智能更注重软硬件协同 |
三、具身智能发展历程关键阶段总结
| 发展阶段 | 时间范围 | 核心思想/事件 | 技术里程碑 | 行业影响 |
|---|---|---|---|---|
| 萌芽期 | 1980-1995 | 罗德尼·布鲁克斯提出行为主义智能理论,挑战符号主义 | "成吉思汗"机器人建立分布式感知-行动 | 奠定"交互产生智能"的核心认知 |
| 基础探索期 | 1995-2010 | 本田ASIMO机器人亮相,DARPA沙漠挑战赛举办 | SLAM技术逐步成熟,人形机器人机械结构突破 | 具身智能进入公众视野,自主导航手艺启动探索 |
| 深度学习赋能期 | 2010-2016 | 深度学习爆发,替代传统规则驱动模式 | AlexNet实现图像识别突破,深度强化学习提升抓取成功率 | 感知能力飞跃,从"手工规则"转向"数据驱动" |
| 通用智能探索期 | 2017-2022 | 聚焦跨场景适应能力,推进商业化落地 | OpenAI魔方还原验证Sim2Real科技,Spot机器人商业化 | 从专项能力向多场景适配跨越,开始产业应用 |
| 大模型驱动期 | 2023-至今 | 大语言模型与具身智能融合,国家战略支持 | Mobile ALOHA完成复杂家务学习,Optimus展示编队能力 | 技术爆发式增长,上升为国家层面未来产业 |
四、具身智能核心技术体系拆解
| 技术模块 | 核心功能 | 关键技术/工具 | 典型突破案例 | 当前瓶颈 |
|---|---|---|---|---|
| 感知系统 | 环境精准认知 | 多模态传感器融合、视觉空间智能、抗干扰感知技术 | 特斯拉Optimus 8摄像头阵列,0.1-10N力感知 | 复杂环境稳定性、内容融合实时性、成本平衡 |
| 决策系统 | 任务规划与策略优化 | 大模型意图理解、强化学习、Sim2Real、边缘计算 | 跨维智能DexVerse引擎,OpenAI虚拟训练迁移 | 仿真与现实差距、复杂场景规划效率 |
| 行动系统 | 物理动作精准执行 | 运动规划、力控技术、动态平衡、弹性驱动器 | 特斯拉Optimus SEA技术,达芬奇手术机器人微操作 | 负载/精度/速度平衡,精细动作控制 |
| 反馈系统 | 持续学习与优化 | 闭环学习、在线学习、小样本学习、元学习 | 特斯拉Optimus动作学习周期从50次缩短至8次 | 泛化能力不足,用户偏好记忆与环境适应 |
五、典型应用场景落地分析
| 应用领域 | 代表案例 | 核心技术支撑 | 落地价值 | 发展阶段 |
|---|---|---|---|---|
| 工业制造 | 新松具身智能焊接机器人(川藏铁路) | 多模态感知、协同作业、环境自适应 | 焊接精度+20%,装配时间-30%,零缺陷管控 | 规模化应用 |
| 商业服务 | 跨维智能DexForce W1 Pro咖啡机器人 | 具身智能算法、技能快速部署 | 全自主制作咖啡,日产能200-300杯 | 场景化试点 |
| 医疗康复 | 达芬奇手术机器人、康复训练机器人 | 高精度控制、个性化参数调整 | 辅助复杂手术,提升康复效果与效率 | 专业化应用 |
| 自动驾驶 | 特斯拉FSD系统、自动驾驶车辆 | 环境感知、路径规划、实时决策 | 提升驾驶安全性,降低人工依赖 | 分级落地(L2-L4) |
| 农业领域 | 水果采摘机器人 | 视觉识别、柔性抓取技术 | 提升采摘效率与品质,减少人力成本 | 技巧验证与小范围应用 |
六、开源生态与商业化实践对比
| 类型 | 代表对象 | 核心优势 | 适用场景 | 发展现状 |
|---|---|---|---|---|
| 开源框架 | ROS(机器人操作系统) | 模块化设计、通信机制成熟、生态完善 | 学术研究、工业机器人开发 | ROS 2成为主流,支持多机器人协同 |
| 开源平台 | 跨维智能EmbodiChain | 聚焦数据稀缺问题,提供数据生成与扩增设备 | 具身智能算法开发、场景适配 | 专项工具链完善,降低开发门槛 |
| 商业产品 | 特斯拉Optimus | 复用汽车领域技术,成本可控,定位通用型 | 工业任务、消费级助手(未来) | 先工业后消费,展示多任务能力 |
| 商业产品 | 波士顿动力Spot | 四足结构,环境适应性强 | 工厂巡检、工地监测等特种场景 | 商业化落地成熟,场景垂直化 |
七、当前挑战与未来趋势对应分析
| 类别 | 具体内容 | 技术方向/解决方案 | 影响范围 |
|---|---|---|---|
| 核心挑战 | 环境不确定性 | 鲁棒性感知算法、动态环境建模 | 全场景应用 |
| 核心挑战 | 数据瓶颈 | Sim2Real优化、生成式数据扩增 | 算法训练与场景适配 |
| 核心挑战 | 安全与伦理 | 安全控制机制、隐私保护手艺、法律规范 | 商业化规模化落地 |
| 核心挑战 | 成本与能源 | 低成本传感器研发、高效能源管理 | 消费级与工业级应用普及 |
| 未来趋势 | 语言-行动无缝融合 | 大模型与具身算法深度集成 | 人机交互体验提升 |
| 未来趋势 | 云端+边缘协同 | 算力分层部署、低延迟传输技术 | 实时性与性能平衡 |
| 未来趋势 | 群体智能 | 多机器人协同算法、分布式决策 | 复杂任务(城市建设、灾难救援) |
| 未来趋势 | 模块化与标准化 | 硬件接口统一、软件工具链标准化 | 产业生态完善与成本降低 |
总结
通过表格化梳理,可清晰看出具身智能以"物理实体+环境交互"为核心特征,在技巧体系上形成"感知-决策-行动-反馈"的完整闭环,目前已在多个领域实现场景化落地,但仍面临环境适应、数据稀缺等关键挑战。未来随着大模型融合、云端边缘协同等技术的突破,以及开源生态与标准化的推进,具身智能将逐步完成从专业化应用到规模化普及的跨越,成为重构物理世界生产生活方式的核心技术力量。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号