

【循环神经网络2】长短期记忆网络LSTM详解 - 指南
1 LSTM的产生背景
大家首先了解一下长短期记忆网络产生的背景。先回顾一下【循环神经网络1】一文搞定RNN入门与详解-CSDN博客中推导的误差项沿时间反向传播的公式:
我们可以根据下面的不等式,来获取通过的模的上界(模能够看做对
中每一项值的大小的度量):
我们可以看到,误差项从 t 时刻传递到 k 时刻,其值的上界是
的指数函数。
分别是对角矩阵
和矩阵
模的上界。显然,除非
乘积的值位于 1 附近,否则,当 t-k 很大时(也就是误差传递很多个时刻时),整个式子的值就会变得极小(当
乘积小于1)或者极大(当
乘积大于1),前者就是梯度消失,后者就是梯度爆炸。虽然科学家们搞出了很多技巧(比如怎样初始化权重),让
的值尽可能贴近于1,终究还是难以抵挡指数函数的威力。
梯度消失到底意味着什么?在【循环神经网络1】一文搞定RNN入门与详解-CSDN博客中我们已证明,权重数组各个时刻的梯度之和,即:就是最终的梯度
假设从 t-3 时刻开始,梯度已经几乎减少到0了。那么,从这个时刻开始再往之前走,得到的梯度(几乎为零)就不会对最终的梯度值有任何贡献,这就相当于无论 t-3 时刻之前的网络状态 h 是什么,在训练中都不会对权重数组的更新产生影响,也就是网络事实上已经忽略了 t-3 时刻之前的状态。这就是原始RNN无法处理长距离依赖的原因。
既然找到了问题的原因,那么我们就能解决它。从问题的定位到解决,科学家们大概花了7、8年时间。终于有一天,Hochreiter和Schmidhuber两位科学家发明出长短时记忆网络,一举解决这个困难。
2 LSTM的结构和概念
其实,长短时记忆网络的思路比较简单。原始RNN的隐藏层只有一个状态,即,它对于短期的输入相当敏感。那么,假如我们再增加一个状态,即
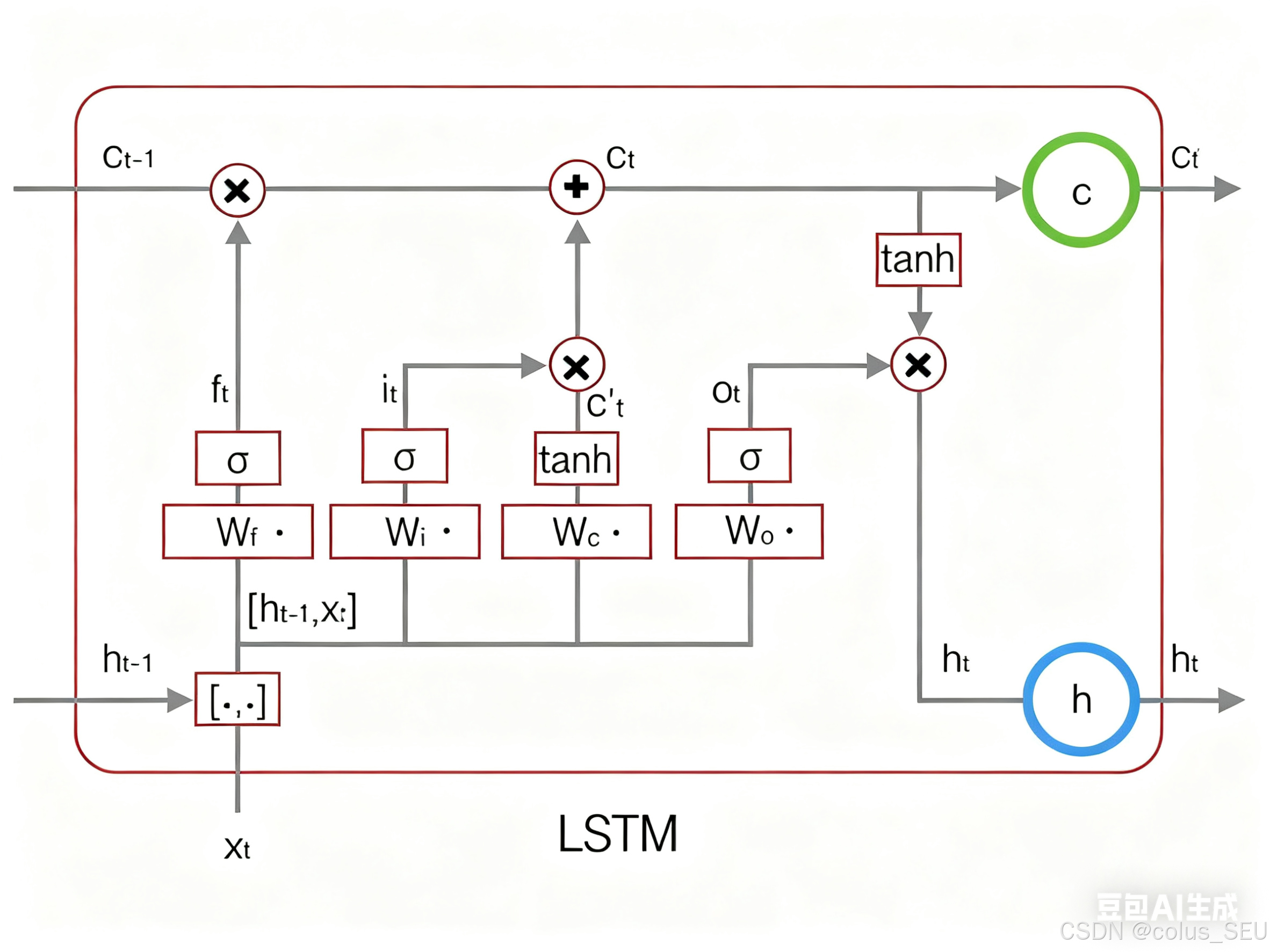
,让它来保存长期的状态,那么问题不就解决了么?如下图所示:
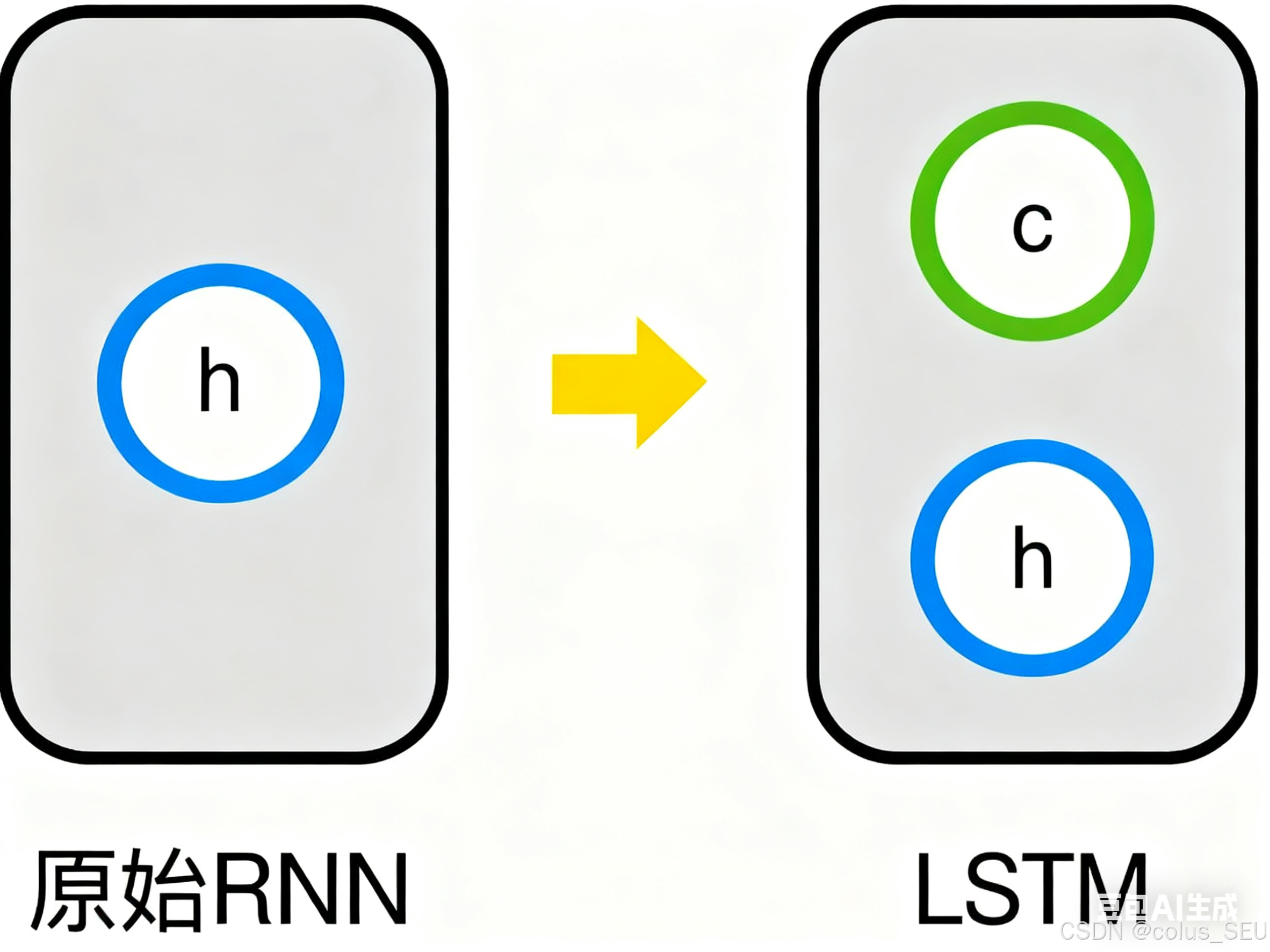
新增加的状态,称为单元状态(cell state)。我们把上图按照时间维度展开:
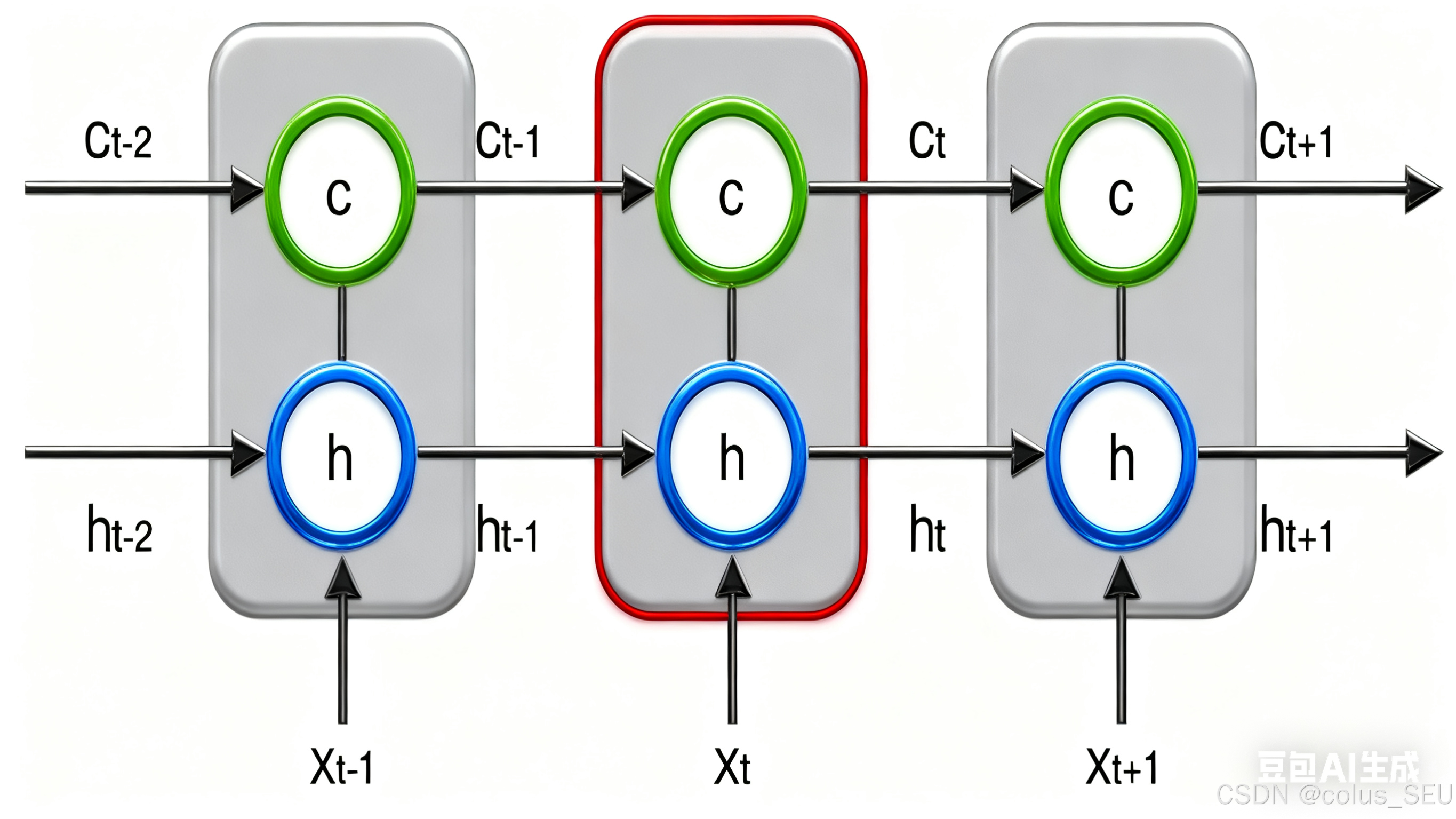
上图仅仅是一个示意图,我们可能看出,在时刻,LSTM的输入有三个:当前时刻网络的输入值
、上一时刻LSTM的输出值
、以及上一时刻的单元状态
;LSTM的输出有两个:当前时刻LSTM输出值
、和当前时刻的单元状态
。注意
都是向量。
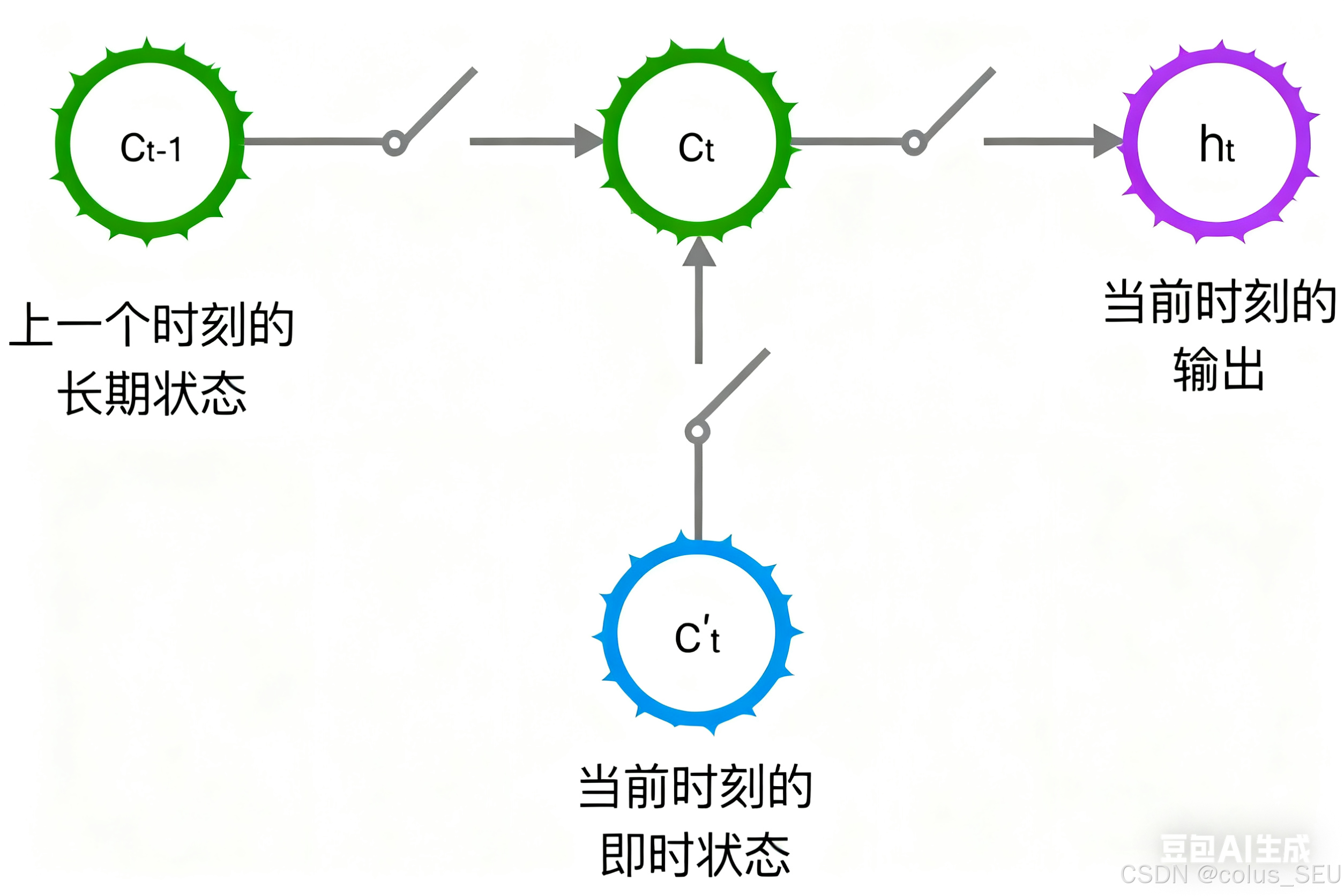
LSTM的关键,就是怎样控制长期状态使用三个控制开关。就是。在这里,LSTM的思路
第一个开关,负责控制继续保存长期状态
;
第二个开关,负责控制把即时状态输入到长期状态
第三个开关,负责控制是否把长期状态
3 LSTM的前向计算
3.1 开关的实现(门)
前面描述的开关是怎样在算法中建立的呢?这就用到了门(gate)一层就是的概念。门实际上就全连接层一个0到1之间的实数向量。假设就是,它的输入是一个向量,输出是门的权重向量,
是偏置项,那么门可以表示为:
门的使用,就是用门的输出向量按元素乘以我们需要控制的那个向量。因为门的输出是0到1之间的实数向量,那么,当门输出为0时,任何向量与之相乘都会得到0向量,这就相当于啥都不能通过;输出为1时,任何向量与之相乘都不会有任何改变,这就相当于啥都可以通过。源于(也就是sigmoid函数)的值域是(0,1),所以门的状态都是半开半闭的。
3.2 三种门的介绍
LSTM用两个门来控制单元状态
一个是遗忘门(forget gate),它决定了上一时刻的单元状态
有多少保留到当前时刻
另一个是输入门(input gate),它决定了当前时刻网络的输入
有多少保存到单元状态
LSTM用输出门(output gate)来控制单元状态
有多少输出到LSTM的当前输出
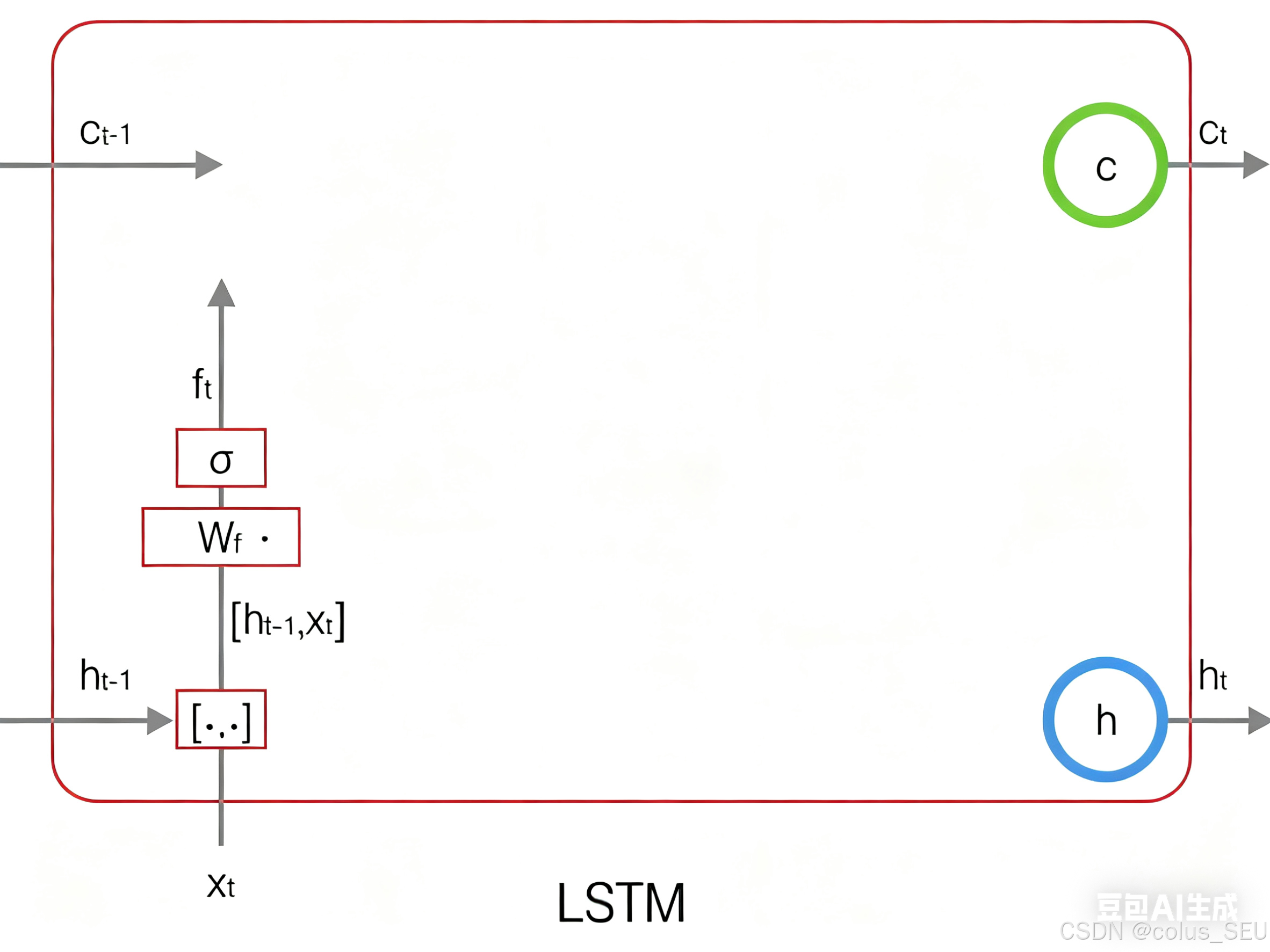
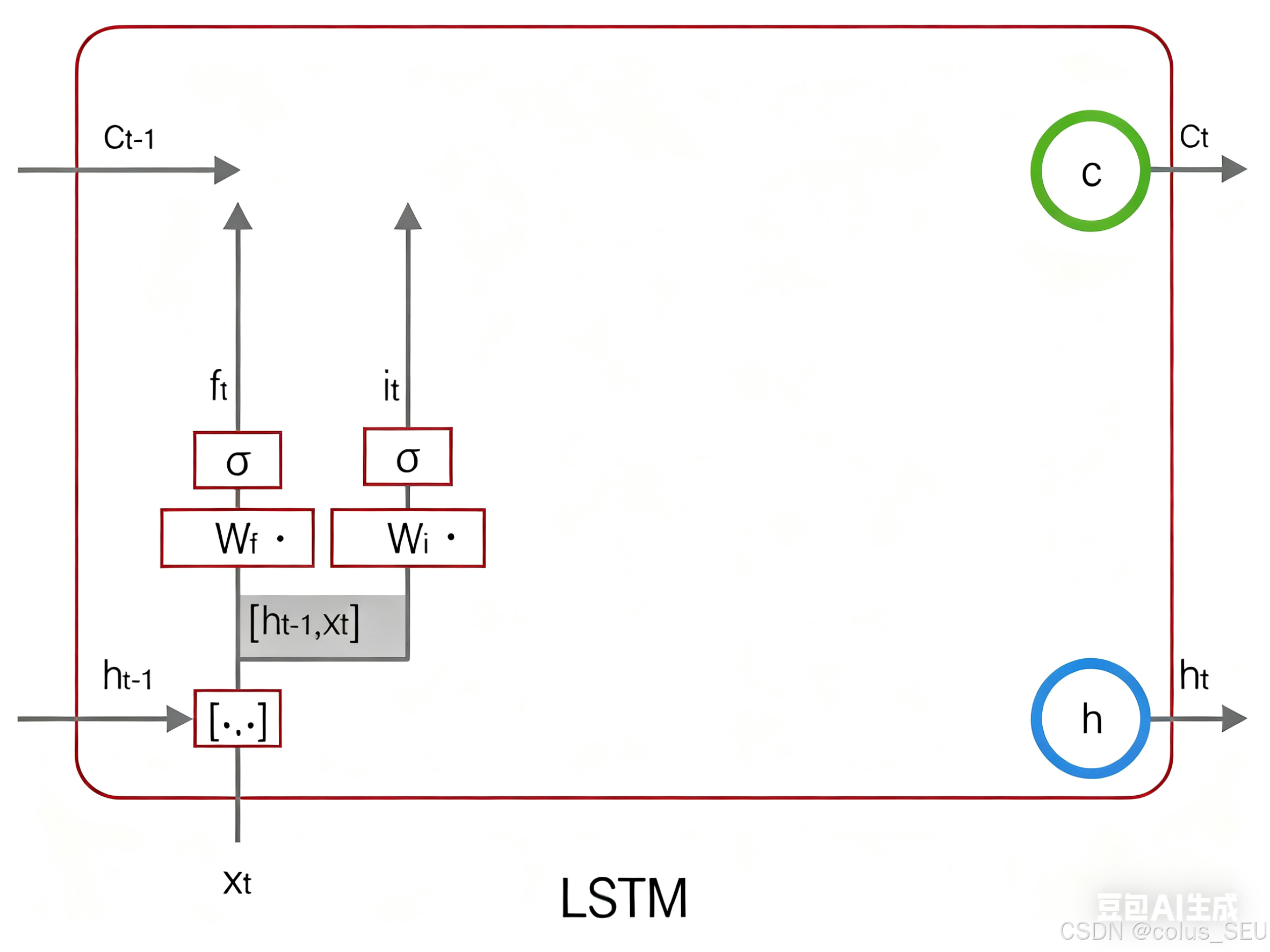
2.3.2.1 遗忘门
是遗忘门的权重矩阵
表示把两个向量连接成一个更长的向量
是遗忘门的偏置项
是sigmoid函数
如果输入的维度是,隐藏层的维度是
,单元状态的维度是
(通常
),则遗忘门的权重矩阵
维度是
。事实上,权重矩阵
两个矩阵拼接而成的:一个是就是都
,它对应着输入项
,其维度为
;一个是
,它对应着输入项
,其维度为
。用矩阵分解表示就是:
遗忘门图示如下:
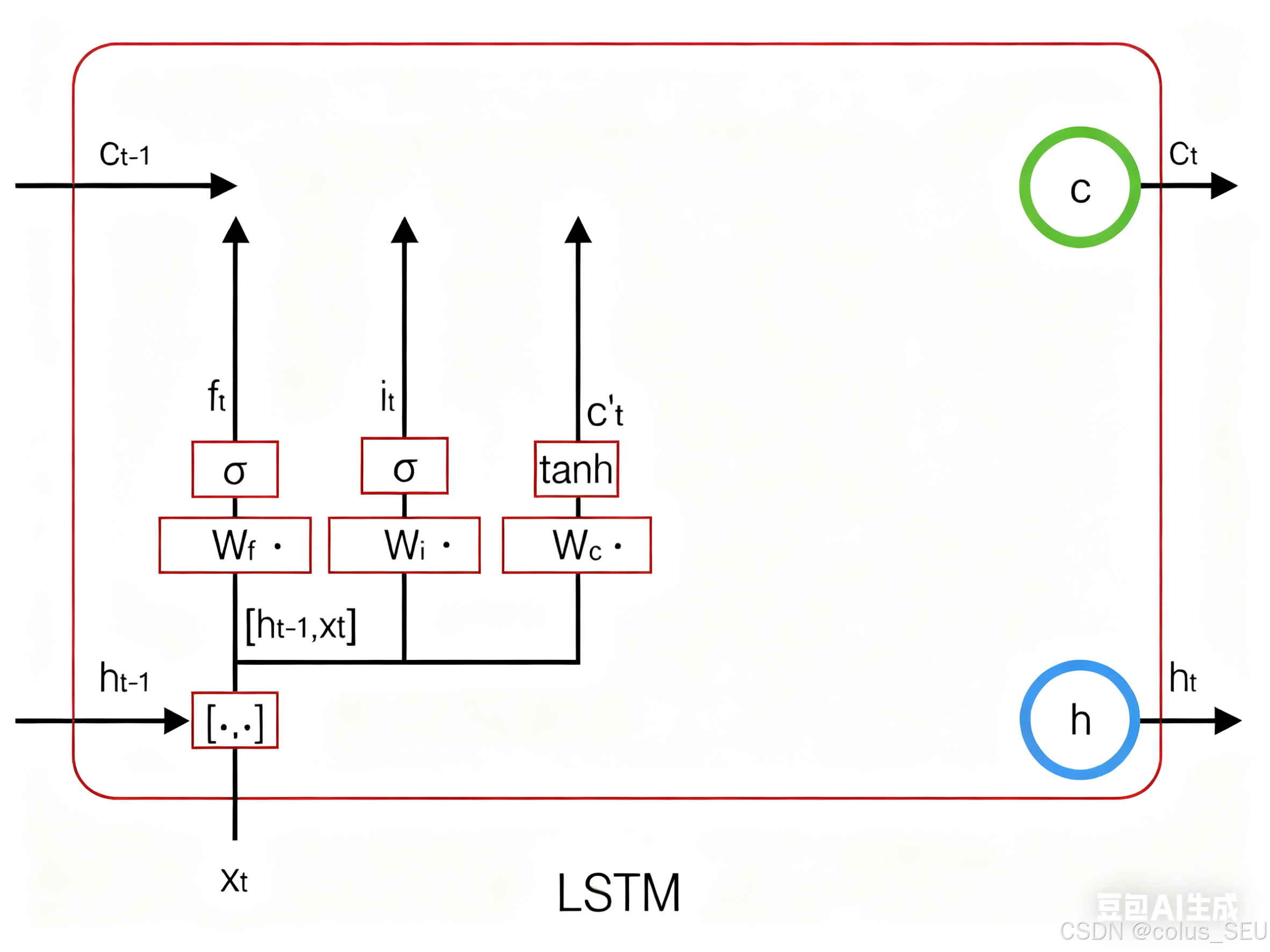
2.3.2.2 输入门:
上式中,是输入门的权重矩阵,
是输入门的偏置项。下图表示了输入门的计算:
接下来,我们计算用于描述当前输入的单元状态,它是根据上一次的输出和本次输入来计算的:
下图是 的计算:
现在,我们计算当前时刻的单元状态。它是由上一次的单元状态
按元素乘以遗忘门
,再用当前输入的单元状态
按元素乘以输入门
,再将两个积加和产生的:
符号 表示按元素乘。下图是
的计算:
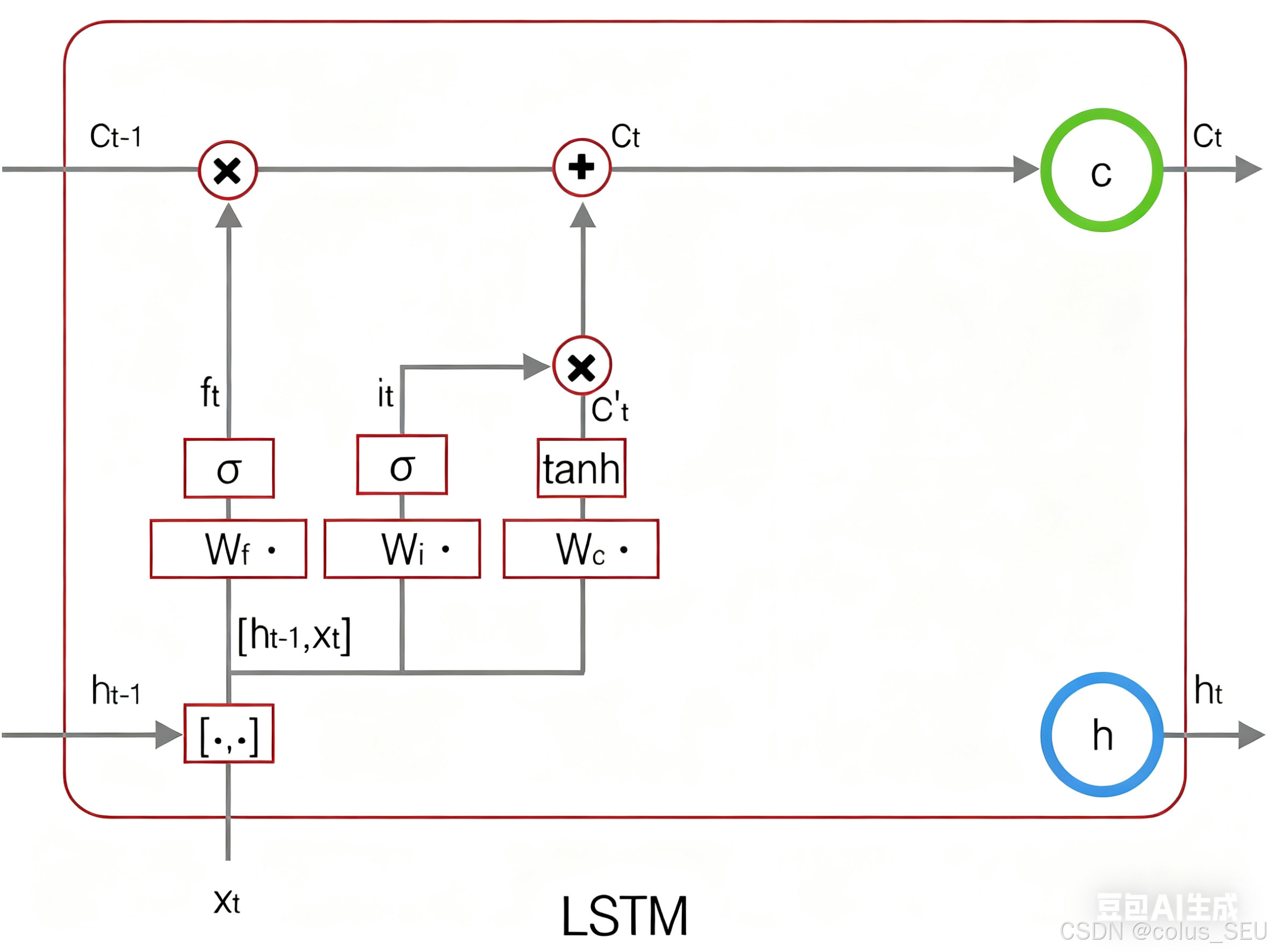
这样,大家就把LSTM关于当前的记忆和长期的记忆
组合在一起,形成了新的单元状态
。由于遗忘门的控制,它允许保存很久很久之前的信息,由于输入门的控制,它又可以避免当前无关紧要的内容进入记忆。
2.3.2.3 输出门
输出门控制了长期记忆对当前输出的影响:
下图表示输出门的计算:
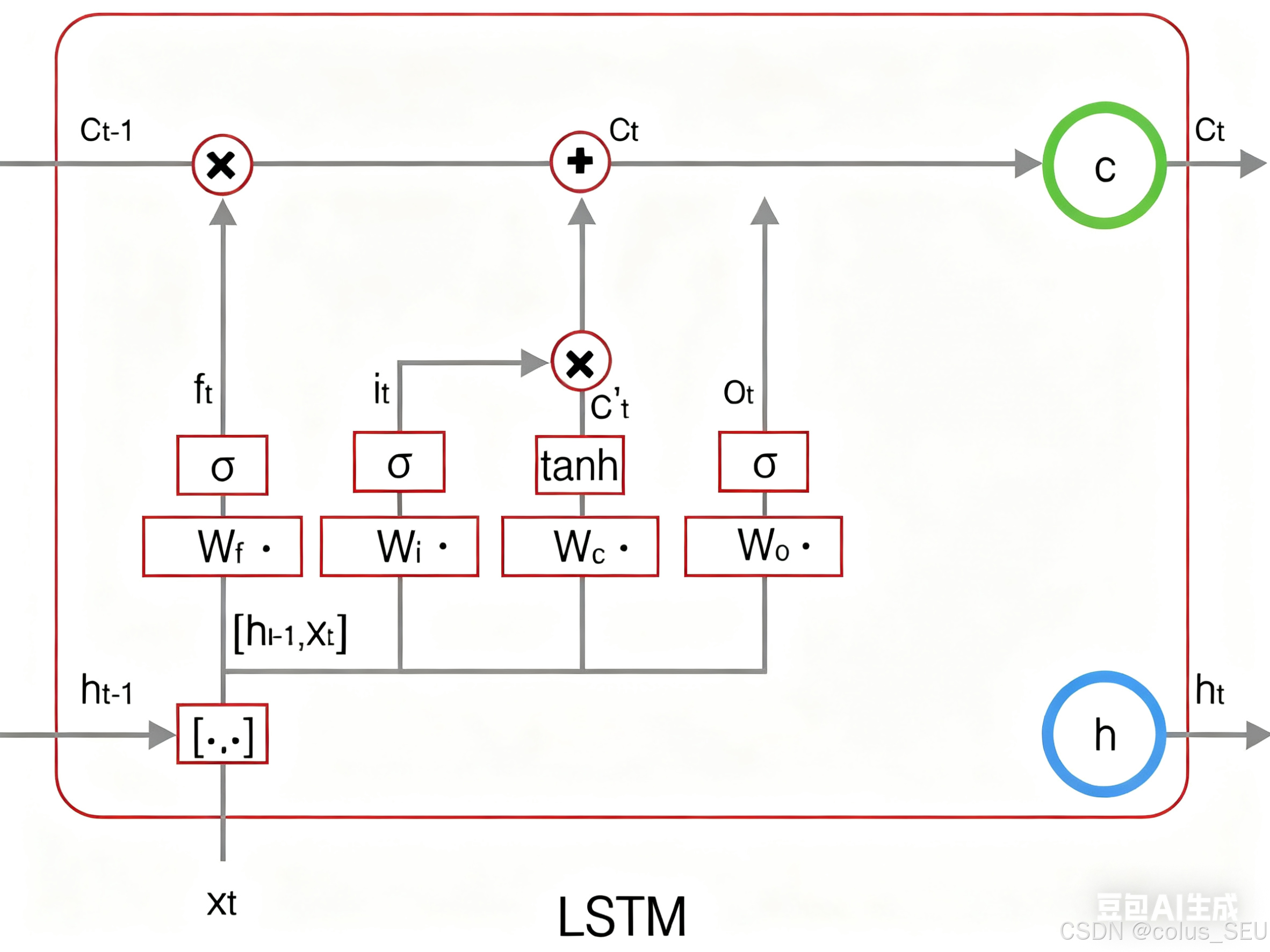
LSTM最终的输出,是由输出门和单元状态共同确定的:
下图表示LSTM最终输出的计算:
式1到式6就是LSTM前向计算的全部公式。
4 LSTM的训练
数学公式高能预警!
4.1 LSTM训练算法框架
LSTM的训练仍然使用反向传播算法,
前向计算每个神经元的输出值。对于LSTM来说就是
五个向量的值。计算方法已经在上一节中描述过了。
反向计算每个神经元的误差项
值。LSTM误差项的反向传播也包括两个方向:
一个是沿时间的反向传播,即从当前时刻开始,计算每个时刻的误差项
一个是将误差项向上一层传播
根据相应的误差项,计算每个权重的梯度。
4.2 公式和符号说明
接下来的推导中,我们设定gate的激活函数为sigmoid函数,输出的激活函数为tanh函数:
关于激活函数,以下文章中有具体讲解:
LSTM需要学习的参数共有8组,分别是:遗忘门的权重矩阵 和偏置项
、输入门的权重矩阵
和偏置项
、输出门的权重矩阵
和偏置项
,以及计算单元状态的权重矩阵
和偏置项
。因为权重矩阵的两部分在反向传播中使用不同的公式,因此在后续的推导中,权重矩阵
都将被写为分开的两个矩阵:
。
我们解释一下按元素乘 符号:
当
作用于两个向量时,运算如下:
当
当
按元素乘可以在某些情况下简化矩阵和向量运算。例如,当一个对角矩阵右乘一个矩阵时,相当于用对角线组成的向量按元素乘那种矩阵:
当一个行向量右乘一个对角矩阵时,相当于该行向量元素乘那个矩阵对角线组成的向量:
上面这两点,在我们后续推导中会多次用到。
在 t 时刻,LSTM的输出值为。我们定义 t 时刻的误差项
为:
注意,我们这里假设误差项是损失函数对输出值的导数,而不是对加权输入
的导数。因为LSTM有四个加权输入,分别对应
四个。但我们仍然需要定义出这四个加权输入,以及他们对应的误差项。就是我们希望往上一层传递一个误差项而不
4.3 误差项沿时间的反向传递
沿时间反向传递误差项,就是要计算出t-1时刻的误差项。
我们知道,是一个 Jacobian 矩阵。假设隐藏层
的维度是
的话,那么它就是一个
矩阵,因此上述公式需要使用转置。其中
的计算公式如下,即前面的式6和式4:
由于 都是
的函数,利用全导数公式可得:
下面,我们要把式7中的每个偏导数都求出来。根据式6,我们许可求出:
根据式4,我们可以求出:
因为:
我们很容易得出:
将上述偏导数带入到式7,我们得到:
根据 的定义,可知:
式8到式12就是将误差沿时间反向传播一个时刻的公式。有了它,大家可以写出将误差项向前传递到任意k时刻的公式:
4.4 误差项传递到上一层
大家假设当前为第 层,定义
层的误差项是误差函数对
层加权输入的导数,即:
LSTM的输入由下面的公式计算:
上式中, 表示第
层的激活函数。
因为 都是
的函数,
又是
的函数,因此,要求出
对
的导数,就需使用全导数公式:
式14就是将误差传递到上一层的公式。
4.5 权重梯度的计算
对于 的权重梯度,我们知道它的梯度是各个时刻梯度之和(证明过程请参考【循环神经网络1】一文搞定RNN入门与详解-CSDN博客4.3节),我们首先求出它们在
时刻的梯度,随后再求出他们的最终的梯度。
我们已经求得了误差项,很容易求出
时刻的
:
将各个时刻的梯度加在一起,就能得到最终的梯度:
对于偏置项 的梯度,也是将各个时刻的梯度加在一起。下面是各个时刻的偏置项梯度:
下面是最终的偏置项梯度,即将各个时刻的偏置项梯度加在一起:
对于 的权重梯度,只需要根据相应的误差项直接计算即可:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号