估值分析作业二
![]() 转自:https://blog.csdn.net/gangdanerya/article/details/105105611
转自:https://blog.csdn.net/gangdanerya/article/details/105105611
问题:
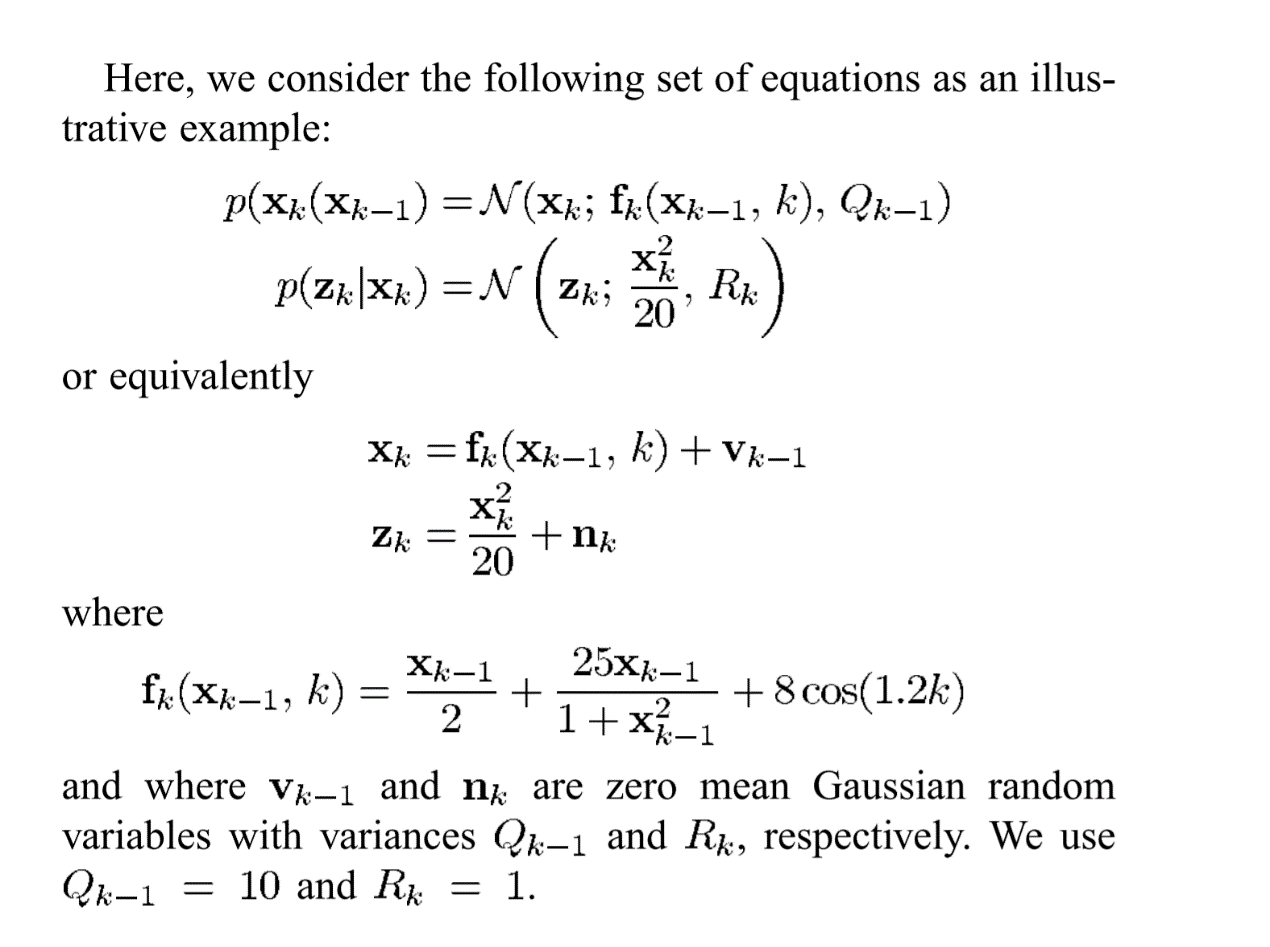
要求:使用扩展卡尔曼滤波(EKF)的方法解决
卡尔曼滤波器只适用于线性系统模型,然而实际中的系统往往都是非线性模型。所以必须对卡尔曼滤波器进行修改。
EKF基于线性化系统的思想,将系统函数的非线性函数作一阶Taylor展开,得到线性化系统方程。扩展的卡尔曼滤波器算法就是适用于非线性系统的卡尔曼滤波器。它与经典的线性卡尔曼滤波器很相似,算法步骤和结构都相同。不同在于系统模型和矩阵A和H。.
代码:
N = 300; %连续计算N个时刻
Q = 10; %过程方差
R = 1; %测量方差
v=sqrt(Q)*randn(1,N); %过程标准差
n=sqrt(R)*randn(1,N); %测量标准差
P =eye(1);
x=zeros(1,N);%真实值
Xresult=zeros(1,N); %最优估计值
x(1,1)=0;
Xresult (1,1)=x(1,1);
z=zeros(1,N); %状态测量值
z(1)=x(1,1)^2/20+v(1);
z1=zeros(1,N); %测量值的估计
z1 (1,1)=z(1);
for k = 2 : N
%模拟系统
x(:,k) = 0.5 * x(:,k-1) + (25 * x(:,k-1) / (1 + x(:,k-1).^2)) + 8 * cos(1.2*k) + v(k-1);
z(k) = x(:,k).^2 / 20 + n(k);
%EKF开始
Xmid= 0.5* Xresult (:,k-1)+ 25* Xresult (:,k-1)/(1+ Xresult (:,k-1).^2) + 8 * cos(1.2*k);
%预测值的估计
z1= Xmid.^2/20;
%雅克比矩阵
F = 0.5 + 25 * (1- Xresult.^2)/((1+ Xresult.^2).^2);
H = Xmid /10;
PP=F*P*F'+Q; %过程方差预测
Kk=PP*H'*inv(H*PP*H'+R); %inv返回逆矩阵
Xresult (k)= Xmid +Kk*(z(k)- z1); %修正值
P=PP-Kk*H*PP; %EKF方差
end
%画图
t = 1 : N;
figure;
plot(t,x(1,t),'c',t, Xresult (1,t),'b');
legend('真实值','EKF估计值');
运行结果:
当N=30时:

当N=300时:
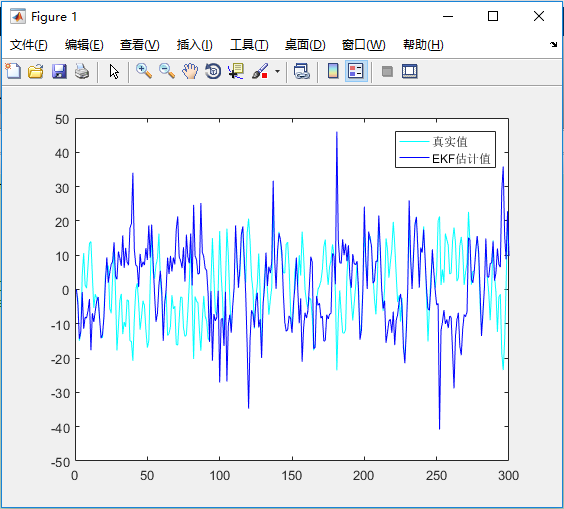
观测最后算法运行得到的结果,发现当时间规模较小的时候,EKF的估计值和真实值相差较小,而当时间规模较大时,通过EKF拟合而来的曲线则与真实值偏差较大。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号