隐马尔可夫模型(三)
预测算法
还记得隐马尔可夫模型的三个问题吗?本篇介绍第三个问题:预测问题,即给定模型参数和观测序列,求最有可能的状态序列,有如下两种算法。
近似算法
在每个时刻t选出当前最有可能的状态 it,从而得到一个状态序列。
给定隐马尔可夫模型参数 λ 和长度为T的观测序列O,在时刻 t 处于状态qi的概率为
 (1)
(1)
其中使用了前向算法和后向算法,于是最有可能的状态的下表 i 为
 (2)
(2)
于是得到状态序列I*=(i1*,i2*,...,iT*)
近似算法虽然计算简单,但是无法保证状态序列整体是最优的,也就是说在这个模型参数 λ 和观测序列O下,近似算法得到的状态序列可能不是出现概率最大的那个状态序列(即,P(I*|O,λ) 可能不是最大值)
维特比算法
维特比算法实际使用了动态规划(dynamic programming)求概率最大路径(最优路径),这条路径就是这里的状态序列。
根据动态规划原理,如果最优路径在时刻 t 经过结点 it*,那么从结点it*到结点iT*之间的局部路径也是最优的。因为如果it*到iT*之间如果有另一个更优的局部路径,那么将它与i1*到it*之间的最优局部路径连接起来,就形成一条完整的更优路径,这与之前的最优路径矛盾。
上面这段话的意思是,到了时刻t,无论之前的局部路径选择如何,此后时刻t到时刻T之间的选择必须是最优的。
根据这一原理,我们可以从t=1时刻开始,递推计算在时刻t状态为 i 的各条局部路径的最大概率,这意味着最优局部路径经过结点 it*。当t=T时的最大概率即为最优完整路径的概率,最优完整路径的终结点为iT*。因为我们计算的是在时刻 t 状态为 i 的局部概率,时刻t之前的各时刻状态不指定,这是为了减小计算量,在时刻 t 时,共计算 t * N 次概率,其中 N 为所有状态数。得到终结点iT*后,为了找到最优完整路径的其他结点,从终结点iT*开始,由后向前逐步求得节点iT-1*, ... , i1*。
引入两个变量
定义时刻 t 状态为i的所有局部路径(i1,i2,...,it)中概率最大值为
 (3)
(3)
即,指定 t 时刻的状态为 i,选择不同的状态组合(i1,i2,...,it-1),使得上式中的概率最大,于是递推公式为,

令it=j,于是
 (4)
(4)
其中,

仔细研究δt(i)的含义,其实就是到达 t 时刻为止,观测序列已经确定为(o1,o2,...,ot),对应的状态序列(i1,i2,...,it)并且假设 it 的值为 i,O,I联合概率最大的值,设对应的状态为(i1,i2,...it=i),于是这就是到达 t 时刻状态为 i 的局部最优路径,注意 限定了 t 时刻状态为 i。当t=T时,δT(i)就是状态为 i 的O,I联合概率最大值,那么假设 i = m 时δT(i)值达到最大 ,那么状态序列(i1,i2,...,iT-1,iT=m)就是所求的最有可能出现的状态序列。
,那么状态序列(i1,i2,...,iT-1,iT=m)就是所求的最有可能出现的状态序列。
好了,给出下图,进行一些可能是无用(然而我就是喜欢啰嗦,摊手~)的分析:
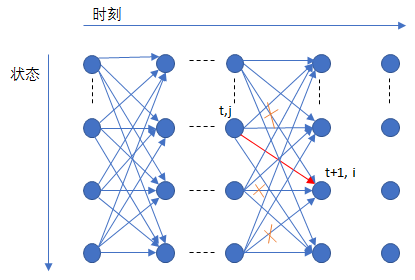
如图,横轴方向表示时刻 t,纵轴方向表示状态 i,结点之间的箭头表示转移,结点(t,j)对应的局部最优概率为δt(j),那么从时刻 t 转移到 时刻 t+1时,如果时刻 t+1 的状态为 i,那么时刻 t 的状态可以是 1<=j<=N,这N个状态到底使用哪个状态呢,不难想到,对时刻 t 来说,某个状态 j 的局部最优概率为δt(j),状态 j 到 状态 i 的转移概率为 aji,自然地,我们对 1<= j<=N,寻找 δt(j)*aji的最大值,比如图中那个红色的箭头对应δt(j)*aji的最大值,t 时刻其他状态转移到 t+1 时刻的 i 状态的箭头全被否定掉,如图中叉叉掉的箭头(注意仅叉掉 到(t+1,i)的结点的连线,到 t+1 时刻其他状态的结点不能这么贸然叉掉,而是同 i 状态下一样的选择)。这样再乘以一个与 t 时刻状态 j 无关的一个值 bi(ot+1)(也就是说无论 t 时刻选择什么状态,这个值都不变),就得到δt+1(i),那么当 t+1 = T 时,即最终时刻,只要遍历一下 t+1 时刻的所有状态 i,找出 max(δt+1(i)) 对应的那个 i 的值就就是完整的最优路径的终结点 (T,i)。倒过来推,那么δt(j)是如何确定的呢?显然类似地,选择结点(t-1,k),使得 δt-1(k)*at-1,t 的值最大,于是就这样一直倒推,直到起始时刻 1,而我们知道 δ1(i)=πibi(o1)。
假设我们每个时刻每个状态形成一个结点,那么每个结点的局部最优概率形成的路线也许就是下图这个样子,
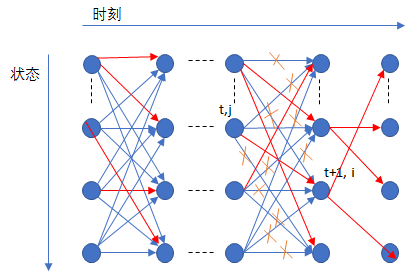
也就是每个结点都有对应的局部最优概率值,且由上一时刻的某个状态转移过来。而上一时刻某个状态的结点也可能转移到下一时刻的多个状态结点。
好吧,费话了一大篇,还不知道讲清楚没,悲催~
定义时刻 t 的状态为 i 的所有局部路径(i1,i2,...,it)中概率最大值对应的那个局部路径的第 t-1 个结点为
 (5)
(5)
即,第 t-1 个结点为 it-1*,t-1时刻的状态就是使上式值最大对应的那个状态下标 j。
为什么这么做就可以呢?
再次看一下上面的那个图,因为图中两相邻时刻标记的是 t 和 t+1 时刻,我就使用图中的标记,其实本质是一样的。
看一下图,从 t 到 t+1 的状态,我们选择的是什么样的转移(什么样的红色箭头)?已知 t+1 时刻的状态为 i,那么转移的选择是根据 δt(j)*aji 的最大值选择的,其中 j 表示 t 时刻的某个状态,自然要求使得 δt(j)*aji 最大所对应的那个 j 作为 t 时刻的状态,依次逆推下去,直到 t = 1,得到第一个观测状态,如此,形成我们要求的概率最大的状态序列。
实际在程序中,上述的这种逆推其实并不需要真正地逆推,只要在递推计算δt(i)的时候,将 max[δt-1(j)aji] 所对应的那个 j 值保存到一个状态下标的列表中即可。
ref
统计学习方法,李航
代码
可参考jieba分词

 浙公网安备 33010602011771号
浙公网安备 33010602011771号