
四元数的笔记
定义
四元数 \(h = a + bi + cj + dk\)
共轭: $ h^* = a -bi -cj -dk$
逆: $ h^{-1} = \frac{h*}{|h|2}$
所以单位四元数的共轭等于他的逆
单位四元数(绝对值为1的四元数)若实部为cos(t),它的共轭作用是一个角度为2t的转动,转轴为虚部的方向。
四元数的优点是:
- 表达式无奇点,无万向锁(和例如欧拉角之类的表示相比)
- 比矩阵更简炼,旋转矩阵有9个变量(也更快速)
- 单位四元数可以表示四维空间中的一个转动。
只有单位四元数才能表示旋转,所以在Eigen中一般会有quaternion.normialzed()进行归一化的处理
任给一个单位四元数q,计算它的虚部,我们就马上可以知道转轴是什么,计算一个单位四元数的实部,它的反余弦值给出旋转角的一半。在四元数表示下,计算转轴和旋转角变得异常简单。
四元数的微分
当我们使用旋转轴加上旋转角表示旋转的时候,我们定义如下
\(v =u \theta\) , u是单位向量,\(\theta = ||v||\)
并且由泰勒展开,我们有, \(e^v = e^{u\theta} = cos\theta + usin\theta\)
记住一个绕轴u旋转\(\theta\)角度的旋转,表示成四元数的时候是做两次旋转,对应的q是\(cos(\frac {\theta}{2}) + u sin(\frac {\theta}{2})\) = \( \begin{bmatrix} cos(\frac {\theta}{2}) \\ u sin(\frac {\theta}{2}) \\ \end{bmatrix}\)
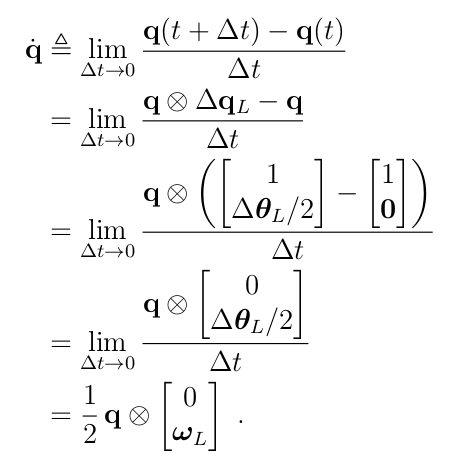
对应的当我们旋转很小的角度,\(\theta\) --> 0的时候,我们对上面的矩阵和e函数求近似值,有

对时间求微分
代入就有
看上面的公式,角速度在不同的坐标系表示下,一个是乘在左边的一个是在右边的,如果把右边的一个R乘过去,
这个是不是很熟悉,就是李群和李代数之间的变换关系。
在下面的那篇论文中可以证明,

说明李群中对应的skew-matrix不是随便选取的(不是只要满足反对成矩阵的性质),是有一定的方法。\(\omega\)又叫做rotation vector. encodes the angle and axis of rotation
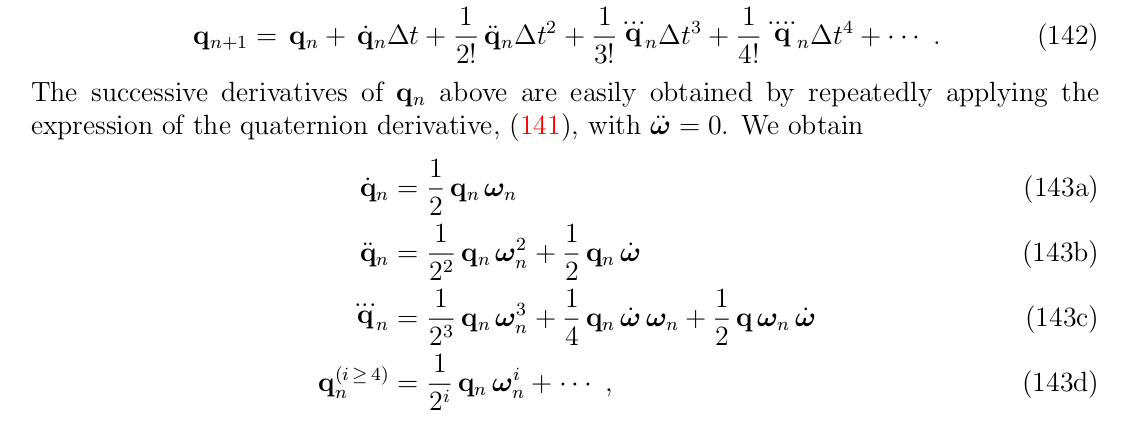
在一段时间内\([t_n,t_{n+1}]\),\(\dot \omega =0\),

上面的左边就是\(e^{\omega \Delta t/2}\),根据上面说的这个指数对应的旋转角是\(w_n \Delta t\),所以有,
这样我们就有了相邻时刻的四元数关系,上面的所有公式都可以在下面的论文找到。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号