Canbus ID filter and mask
CANBUS is a two-wire, half-duplex, bus based LAN system that is ‘collision free’.
Data is BROADCAST onto the bus -THERE IS NO SUCH THNG AS A POINT TO POINT CONNECTION as with data LANs.
All nodes receive all broadcast data and decide whether or not that data is relevant.
A CANBUS B frame consists of a four byte header (containing a 29-bit identifier), followed by up to 8 data bytes.
A receiving node would examine the identifier to decide if it was relevant (e.g. waiting for a frame with ID 00001567 which contains data to switch on or off a motor).
It could do this via software (using a C if or case statement); in practice the Canbus interface contains firmware to carry out this task
using the acceptance filter and mask value to filter out unwanted messages.
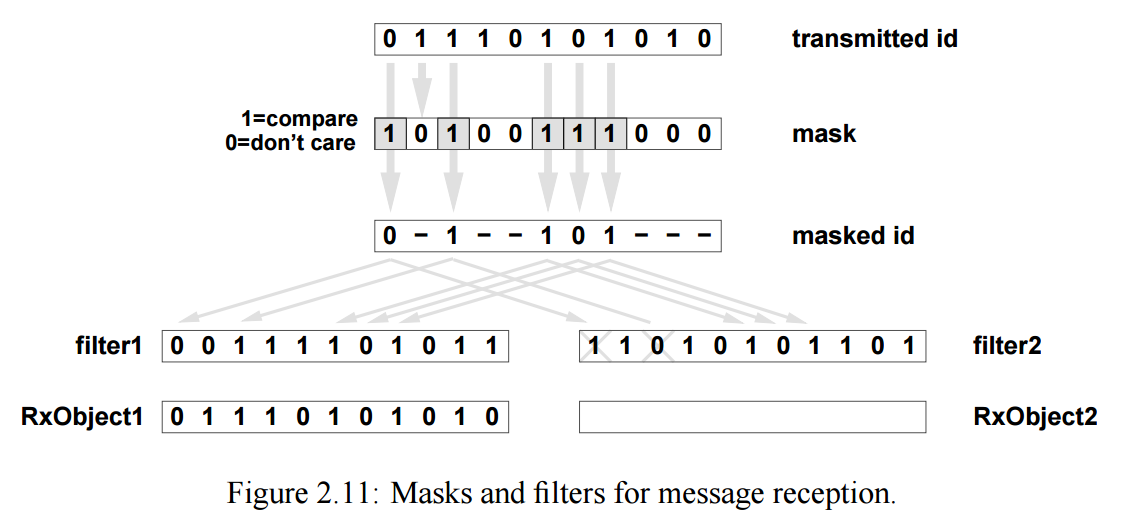
The filter mask is used to determine which bits in the identifier of the received frame are compared with the filter
-
If a mask bit is set to a zero, the corresponding ID bit will automatically be accepted, regardless of the value of the filter bit.
-
If a mask bit is set to a one, the corresponding ID bit will be compare with the value of the filter bit;
if they match it is accepted otherwise the frame is rejected.
A filter matches, when received_can_id & mask == can_id & mask -- Mask=1 : Do Care Bits
Example 1. we wish to accept only frames with ID of 00001567 (hexadecimal values)
-
set filter to 00001567
-
set mask to 1FFFFFFF --- Every Bit must match filter
when a frame arrives its ID is compared with the filter and all bits must match; any frame that does not match ID 00001567 is rejected
Example 2. we wish to accept only frames with IDs of 00001560 thru to 0000156F
-
set filter to 00001560
-
set mask to 1FFFFFF0 Low 4 Bits dont care
when a frame arrives its ID is compared with the filter and all bits except bits 0 to 3 must match; any frame other frame is rejected
Example 3. we wish to accept only frames with IDs of 00001560 thru to 00001567
-
set filter to 00001560
-
set mask to 1FFFFFF8 Low 3 Bits dont care
when a frame arrives its ID is compared with the filter and all bits except bits 0 to 2 must match; any frame other frame is rejected
Example 4. we wish to accept any frame
-
set filter to 0
-
set mask to 0 --- Every Bits dont care
all frames are accepted
In practice Canbus interfaces tends to have a number of filters and masks so combinations of IDs can be accepted,
e.g. a module that carries out a number of different tasks.// mask bit n | filter bit n | message ID bit n | result
// Mask Filter ID // 0 x x accept // 1 0 0 accept // 1 0 1 reject // 1 1 0 reject // 1 1 1 accept
Since this filtering is done in hardware it is fairly primitive. Usually the calculation involves two registers a mask and a filter. The equivalent logic in C would be:
/* dsPIC style; mask specifies "do care" bits */ if ((arbitrationId & mask) == filter) { /* Message accepted; rx interrupt triggered */ } /* Accept all */ mask = 0; filter = 0; /* Accept CANopen default connection set (excluding SYNC and NMT) */ mask = 0x7F; filter = node_id;
/* SJA 1000 style; mask specifies "do not care" bits */ if ((arbitrationId & ~mask) == filter) { /* Message accepted; rx interrupt triggered */ } /* Accept all */ mask = ~0; filter = 0; /* Accept CANopen default connection set (excluding SYNC and NMT) */ mask = ~0x7F; filter = node_id;
4.1 RAW protocol sockets with can_filters (SOCK_RAW)
Using CAN_RAW sockets is extensively comparable to the commonly
known access to CAN character devices. To meet the new possibilities
provided by the multi user SocketCAN approach, some reasonable
defaults are set at RAW socket binding time:
- The filters are set to exactly one filter receiving everything
- The socket only receives valid data frames (=> no error message frames)
- The loopback of sent CAN frames is enabled (see chapter 3.2)
- The socket does not receive its own sent frames (in loopback mode)
These default settings may be changed before or after binding the socket.
To use the referenced definitions of the socket options for CAN_RAW
sockets, include <linux/can/raw.h>.
4.1.1 RAW socket option CAN_RAW_FILTER
The reception of CAN frames using CAN_RAW sockets can be controlled
by defining 0 .. n filters with the CAN_RAW_FILTER socket option.
The CAN filter structure is defined in include/linux/can.h:
struct can_filter {
canid_t can_id;
canid_t can_mask;
};
A filter matches, when
<received_can_id> & mask == can_id & mask
which is analogous to known CAN controllers hardware filter semantics.
The filter can be inverted in this semantic, when the CAN_INV_FILTER
bit is set in can_id element of the can_filter structure. In
contrast to CAN controller hardware filters the user may set 0 .. n
receive filters for each open socket separately:
struct can_filter rfilter[2];
rfilter[0].can_id = 0x123;
rfilter[0].can_mask = CAN_SFF_MASK;
rfilter[1].can_id = 0x200;
rfilter[1].can_mask = 0x700;
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
To disable the reception of CAN frames on the selected CAN_RAW socket:
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, NULL, 0);
To set the filters to zero filters is quite obsolete as to not read
data causes the raw socket to discard the received CAN frames. But
having this 'send only' use-case we may remove the receive list in the
Kernel to save a little (really a very little!) CPU usage.
4.1.1.1 CAN filter usage optimisation
The CAN filters are processed in per-device filter lists at CAN frame
reception time. To reduce the number of checks that need to be performed
while walking through the filter lists the CAN core provides an optimized
filter handling when the filter subscription focusses on a single CAN ID.
For the possible 2048 SFF CAN identifiers the identifier is used as an index
to access the corresponding subscription list without any further checks.
For the 2^29 possible EFF CAN identifiers a 10 bit XOR folding is used as
hash function to retrieve the EFF table index.
To benefit from the optimized filters for single CAN identifiers the
CAN_SFF_MASK or CAN_EFF_MASK have to be set into can_filter.mask together
with set CAN_EFF_FLAG and CAN_RTR_FLAG bits. A set CAN_EFF_FLAG bit in the
can_filter.mask makes clear that it matters whether a SFF or EFF CAN ID is
subscribed. E.g. in the example from above
rfilter[0].can_id = 0x123;
rfilter[0].can_mask = CAN_SFF_MASK;
both SFF frames with CAN ID 0x123 and EFF frames with 0xXXXXX123 can pass.
To filter for only 0x123 (SFF) and 0x12345678 (EFF) CAN identifiers the
filter has to be defined in this way to benefit from the optimized filters:
struct can_filter rfilter[2];
rfilter[0].can_id = 0x123;
rfilter[0].can_mask = (CAN_EFF_FLAG | CAN_RTR_FLAG | CAN_SFF_MASK);
rfilter[1].can_id = 0x12345678 | CAN_EFF_FLAG;
rfilter[1].can_mask = (CAN_EFF_FLAG | CAN_RTR_FLAG | CAN_EFF_MASK);
setsockopt(s, SOL_CAN_RAW, CAN_RAW_FILTER, &rfilter, sizeof(rfilter));
4.1.2 RAW socket option CAN_RAW_ERR_FILTER
As described in chapter 3.4 the CAN interface driver can generate so
called Error Message Frames that can optionally be passed to the user
application in the same way as other CAN frames. The possible
errors are divided into different error classes that may be filtered
using the appropriate error mask. To register for every possible
error condition CAN_ERR_MASK can be used as value for the error mask.
The values for the error mask are defined in linux/can/error.h .
can_err_mask_t err_mask = ( CAN_ERR_TX_TIMEOUT | CAN_ERR_BUSOFF );
setsockopt(s, SOL_CAN_RAW, CAN_RAW_ERR_FILTER,
&err_mask, sizeof(err_mask));

 浙公网安备 33010602011771号
浙公网安备 33010602011771号