
Ceres优化
Ceres Solver是谷歌2010就开始用于解决优化问题的C++库,2014年开源.在Google地图,Tango项目,以及著名的SLAM系统OKVIS和Cartographer的优化模块中均使用了Ceres Solver.
有关为何SLAM问题可以建模为最小二乘问题,进而使用最优化方法来求解,可以理解这一段话:
- Maximum likelihood estimation (MLE) is a well-known estimation method used in many robotic and computer vision applications. Under Gaussian assumption, the MLE converts to a nonlinear least squares (NLS) problem. Efficient solutions to NLS exist and they are based on iteratively solving sparse linear systems until convergence.
在SLAM领域优化问题还可以使用g2o来求解.不过Ceres提供了自动求导功能,虽然是数值求导,但可以避免复杂的雅克比计算,目前来看Ceres相对于g2o的缺点仅仅是依赖的库多一些(g2o仅依赖Eigen).但是提供了可以直接对数据进行操作的能力,相对于g2o应用在视觉SLAM中,更加倾向于通用的数值优化,最重要的是提供的官方资料比较全(看g2o简直受罪...).详细的介绍可以参考google的文档:http://ceres-solver.org/features.html
优化问题的本质是调整优化变量,使得优化变量建模得出的估计值不断接近观测数据(使得目标函数下降),是最大似然框架下对优化变量的不断调整,得到优化变量建模得出的估计值在观测条件下的无偏估计过程.
这里已知的是固定的观测数据z,以及需要调整的初始估计值x0.通常会建模成观测数据和估计值之间的最小二乘问题(但并不一定是最好的建模方式):
$\mathop{\arg\min}_{x_{i,j}} \ \ \frac{1}{2}\sum_{i=1}^{m}\sum_{j=1}^{n}\left \|z_{i,j}-h(x{_{i,j}})) \right \| ^{2}$
一些概念:
- ObjectiveFunction:目标函数;
- ResidualBlock:残差(代价函数的二范数,有时不加区分),多个ResidualBlock组成完整的目标函数;
- CostFunction:代价函数,观测数据与估计值的差,观测数据就是传感器获取的数据,估计值是使用别的方法获取(例如初始化,ICP,PnP或者匀速模型...)的从优化变量通过建模得出的观测值;例如从对极几何得到的相机位姿,三角化得到的地图点可以作为优化变量的初始值,但是需要利用坐标系变换和相机模型转化为2D平面上的像素坐标估计值,与实际测量得到的观测值之间构建最小二乘问题;
- ParameterBlock:优化变量;
- LossFunction:核函数,用来减小Outlier的影响,对应g2o中的edge->setRobustKernel()
求解步骤:
以寻找y=(10-x)2的最小值为例
1.定义一个Functor(拟函数/函数对象)类,其中定义的是CostFunction. 需要重载函数调用运算符,从而可以像使用函数一样使用该类对象.(与普通函数相比,能够在类中存储状态,更加灵活)
operator()的形参,前面几个对应 problem.AddResidualBlock(cost_function, NULL, &x);中最后一部分优化变量,最后一个对应残差
struct CostFunctor { template <typename T> bool operator()(const T* const x, T* residual) const { residual[0] = T(10.0) - x[0]; return true; } };
这里模板参数T通常为double,在需要求residual的雅克比时,T=Jet
2. 建立非线性最小二乘问题,并使用Ceres Solver求解
int main(int argc, char** argv) { google::InitGoogleLogging(argv[0]); // The variable to solve for with its initial value. double initial_x = 5.0; double x = initial_x; // Build the problem. Problem problem; // Set up the only cost function (also known as residual). This uses // auto-differentiation to obtain the derivative (jacobian). CostFunction* cost_function = new AutoDiffCostFunction<CostFunctor, 1, 1>(new CostFunctor); problem.AddResidualBlock(cost_function, NULL, &x); // Run the solver! Solver::Options options; options.linear_solver_type = ceres::DENSE_QR; options.minimizer_progress_to_stdout = true; Solver::Summary summary; Solve(options, &problem, &summary); std::cout << summary.BriefReport() << "\n"; std::cout << "x : " << initial_x << " -> " << x << "\n"; return 0; }
3. 参数选择
在做Bundle Adjustment过程中,建立好优化问题后,需要对优化求解器进行一些参数设置:
Solver::Options options; options.gradient_tolerance = 1e-16; options.function_tolerance = 1e-16;
...
- 梯度阈值 gradient_tolerance.
- 相邻两次迭代之间目标函数之差 function_tolerance.
- 梯度下降策略 trust_region_strategy 可选levenberg_marquardt,dogleg.
- 线性增量方程 HΔx=g 求解方法 linear_solver 可选sparse_schur,dense_schur,sparse_normal_cholesky,视觉SLAM中主要采用稀疏Schur Elimination/ Marginalization的方法(也就是消元法),将地图点的增量边缘化,先求出相机位姿的增量,可以极大地较少计算量,避免H矩阵直接求逆.
- 稀疏线性代数库 sparse_linear_algebra_library 可选suite_sparse,cx_sparse(ceres编译时需额外编译),cx_sparse相对suite_sparse,更精简速度较慢,但是不依赖BLAS和LAPACK.这个通常选择suite_sparse即可.
- 稠密线性代数库 dense_linear_algebra_library 可选eigen,lapack.
- 边缘化次序 ParameterBlockOrdering 设置那些优化变量在求解增量方程时优先被边缘化,一般会将较多的地图点先边缘化,不设置ceres会自动决定边缘化次序,这在SLAM里面常用于指定Sliding Window的范围.
- 多线程 这里的设置根据运行平台会有较大不同,对计算速度的影响也是最多的.分为计算雅克比时的线程数num_threads,以及求解线性增量方程时的线程数num_linear_solver_threads.
- 迭代次数 max_num_iterations,有时迭代多次均不能收敛,可能是初值不理想或者陷入了平坦的区域等等原因,需要设定一个最大迭代次数.
总结:
设置options细节较多,可以参考官方文档去设定:
http://ceres-solver.org/nnls_solving.html#solver-options.
通过实验发现除了多线程以及linear_solver_type,别的对优化性能和结果影响不是很大:
实验代码在:https://github.com/xushangnjlh/xushang_SLAM;
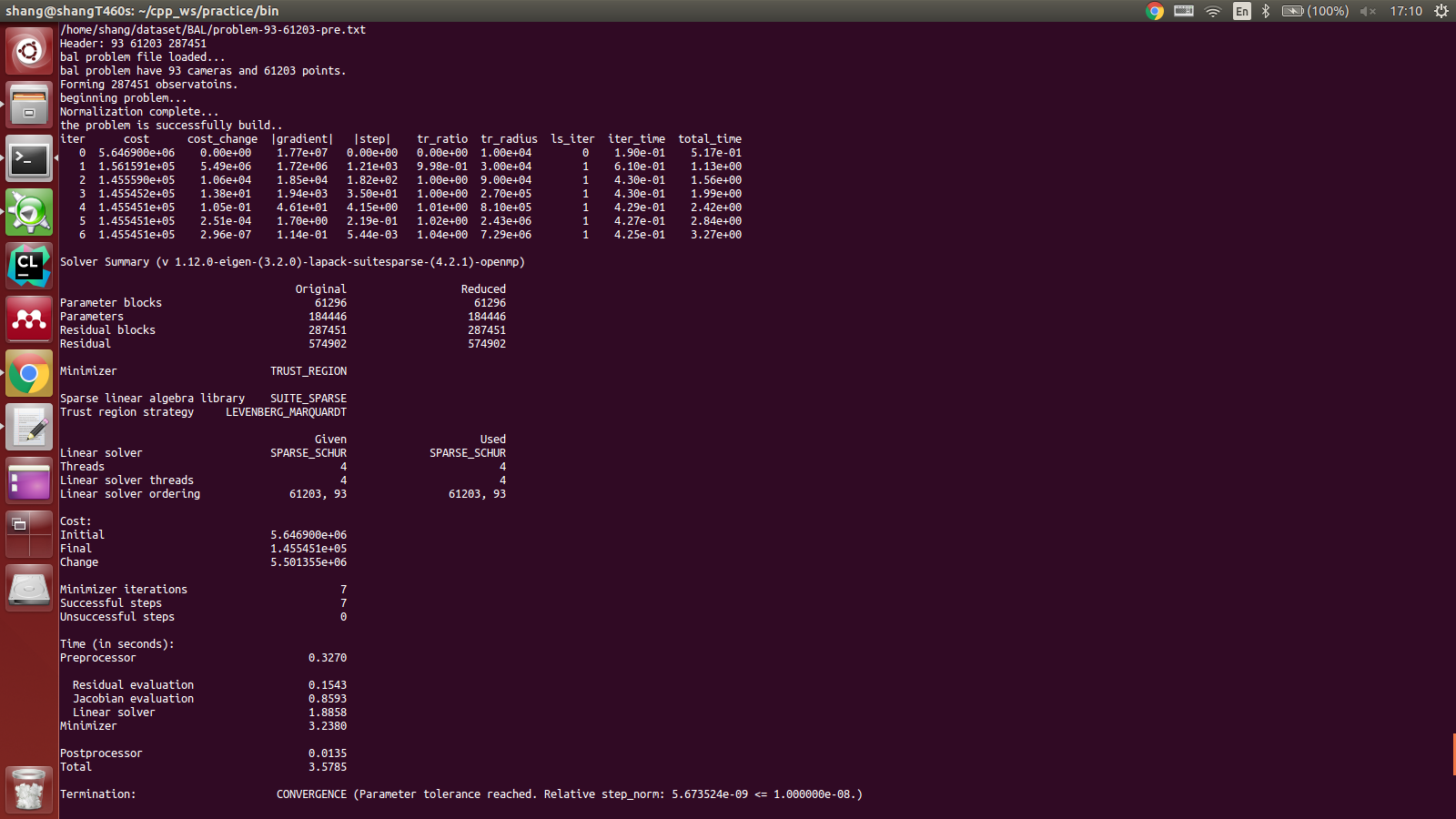
对于93个相机位姿 61203个地图点 287451个观测数据的SFM优化问题:
测试数据集http://grail.cs.washington.edu/projects/bal/final.html
边缘化的影响:
- 边缘化所有地图点Total Time: 3.6005s 其中Linear solver:1.8905s
- 边缘化2/3地图点Total Time: 5.4723s 其中Linear solver:3.7504s
- 边缘化1/3地图点Total Time: 7.0223s 其中Linear solver:5.3335s
线程影响(在四核CPU上测试):
- num_threads=1 Total Time:5.9113s
- num_threads=2 Total Time:4.2645s
- num_threads=4 Total Time:3.5785s
- num_threads=8 Total Time:3.6472s
运行结果截图:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号