
具身智能
Topic I: 3D VIsion
Topic II: Robotics
Topic IV: Reinforcement learning
Linear Algebra
Vector Space 向量空间
-
Linear Combination 线性组合
\(w=a_1v_1+a_2v_2+...+a_nv_n=\sum_i a_iv_i\)
-
Span of Vectors
\(v_i \in V_m\), \(w \in V_m\)
-
Infinite-Ddimensional Vector Space
Optimization Problem
\[min_{x \in \mathbb{R}^n f(x)} \\
s.t. g(x) = 0 \\
h(x) \ge 0
\]
-
Lagrange Multipliers
\[\nabla f(x)=\lambda\nabla g(x) \\ g(x)=0 \\ \mathcal{L}(x,\lambda) \equiv f(x)+\lambda\cdot g(x) \] -
PCA (Principle Component Analysis)
Curve
-
Parameterized Curve
\[\gamma:\mathbb{R}\to\mathbb{R}^{2},\gamma(t)=(x(t),y(t)) \] -
Reparameterization
\[\tilde{\gamma}(t):=\gamma(\phi(t)) \\ \tilde{\gamma}^{\prime}(t)=\frac{d}{dt}\gamma(\phi(t))=\mathbf{v}(\phi(t))\phi^{\prime}(t). \] -
Arc Length
\[\int_a^b\left\|\gamma'(t)\right\|dt \] -
Tangent and Nomal (切线、法线)
\[T'(s) = \mathcal{K}(s) N(s) \\ N'(s) = - \mathcal{K}(s) T(s) \] -
Curvature (曲率)
\[\mathcal{r}(s):=\frac{1}{\mathcal{k}(s)} \] -
3D Curves
Surface I
Surface II
Representation
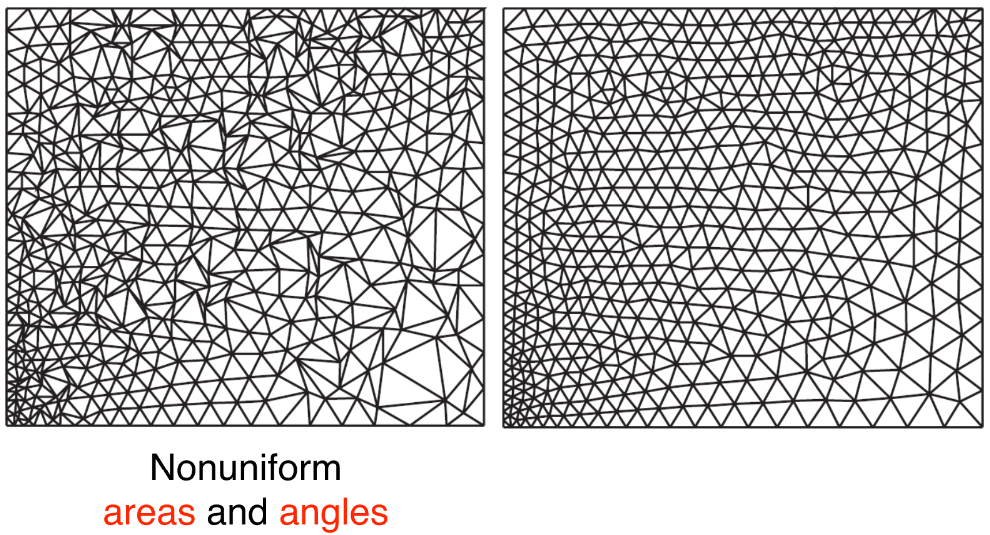
- Polygonal Mesh & Triangle Mesh
- Bad Mesh (Nonuniform areas)
![img]()
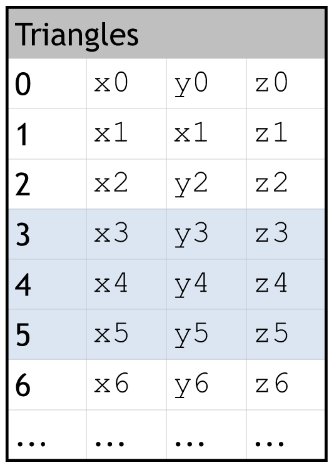
- Data Structures for Surfaces: Triangle list (STL format)
![img]()
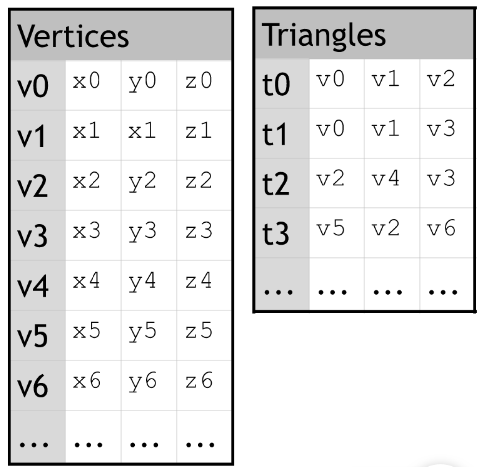
- Vertex, Face (OBJ format)
![img]()
- Bad Mesh (Nonuniform areas)
- Point Cloud
- Uniform Sampling
- Farthest Point Sampling
- Voxelization
Transformation
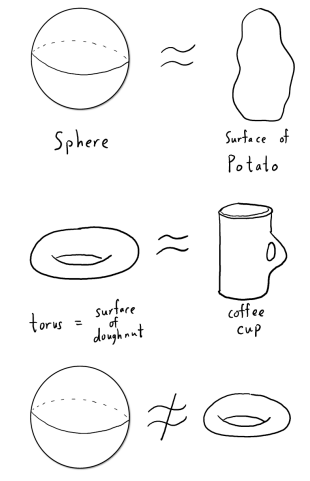
- Topology (拓朴结构)
![img]()
- Orientation: rotation
- pitch(俯仰角), roll(翻滚角), yaw(偏航角) (rotation in \(\mathbb{R}^3\))
库函数的使用
Mujoco
Basics
xml
<mujoco> <!--主标签-->
<worldbody>
<light name="top" pos="0 0 1"/>
<geom name="red_box" type="box" size=".2 .2 .2" rgba="1 0 0 1"/>
<geom name="green_sphere" pos=".2 .2 .2" size=".1" rgba="0 1 0 1"/>
</worldbody>
</mujoco>
mujoco.MjModel
mjModel中包含模型的几何描述信息(不会随时间改变),如颜色、尺寸等信息
from mujoco import MjModel
xml = """
<mujoco>
<worldbody>
<geom name="red_box" type="box" size=".2 .2 .2" rgba="1 0 0 1"/>
<geom name="green_sphere" pos=".2 .2 .2" size=".1" rgba="0 1 0 1"/>
</worldbody>
</mujoco>
"""
"""type(model) => mujoco._structs.MjModel"""
model = MjModel.from_xml_string(xml)
model.ngeom # 获取模型中定义的几何体数量
model.geom_pos # 获取模型中所有几何体的位置数组 (n, 3)
model.geom_rgba # 获取所有几何体的颜色数组 (n, 4)
# n: 几何体数量,4: [r,g,b,a]
"""type(inst) => mujoco._structs._MjModelGeomViews"""
inst = model.geom(<geom_name>) # 通过名称获取几何体实例(当名称不存在时报错)
inst.rgba # 获取实例几何体的颜色数组 (4, )
inst.id # 获取实例几何体的id (int)
# 通过几何体的名称查找id
id = mujoco.mj_name2id(model, mujoco.mjtObj.mjOBJ_GEOM, <geom_name>)
model.geom_rgba[id, :] # 通过id获取几何体的颜色数组
mujoco.MjData
mjData中包含模型的状态信息,如物体在世界空间中的笛卡尔坐标
from mujoco import MjData
"""type(data) => mujoco._structs.MjData"""
data = mujoco.MjData(model) # model为上一步创建的mjModel几何体
data.geom_xpos # model中所有实例几何体的笛卡尔坐标 (n, 3)
"""type(inst) => mujoco._structs._MjDataGeomViews"""
inst = data.geom(<geom_name>)
inst.xpos # 通过名称获取实例几何体的笛卡尔坐标 (3, )
"""
inst的属性:
id
name
xmat
xpos: 实例几何体的笛卡尔坐标 (3, )
"""
Rendering
import mujoco
import mediapy as media
xml = """
<mujoco>
<worldbody>
<light name="top" pos="0 0 1"/> <!--添加场景灯光-->
<geom name="red_box" type="box" size=".2 .2 .2" rgba="1 0 0 1"/>
<geom name="green_sphere" pos=".2 .2 .2" size=".1" rgba="0 1 0 1"/>
</worldbody>
</mujoco>
"""
model = mujoco.MjModel.from_xml_string(xml)
data = mujoco.MjData(model)
with mujoco.Renderer(model) as renderer:
mujoco.mj_forward(model, data) # we should propagate the values in `mjData` using `mujoco.mj_forward(model, data)`
renderer.update_scene(data)
media.show_image(renderer.render())
Simulation
Numpy
import numpy as np
np.linalg.solve(A, b)
# 求解线性方程组 Ax=b
# A:(M,M)的二维系数矩阵
# b:(M,1)的一维数组
# 对于一般的非方阵A,可以构造A^TAx=A^Tb,使用`np.linalg.solve(A^TA, A^Tb)`来求解x

 浙公网安备 33010602011771号
浙公网安备 33010602011771号