
参考内容:B战的DR_CAN的卡尔曼滤波器视频,讲的特别的好,建议要学习的可以去看看,非常通俗易懂,很好理解。
1、初见卡尔曼滤波器-----递归运算
卡尔曼滤波器用一句话来说是一种 optimal recursive data processing algorithm
最优化 递归 数字处理 算法
卡尔曼滤波器更像是一个观测器,而不像传统意义上的滤波器。
卡尔曼滤波器的应用非常广泛,尤其在导航中,之所以会广泛运用是因为生活中存在大量的不确定性,当描述一个系统时这种不确定性主要分为三类。
1、不存在完美的数学模型
不确定性:2、系统的扰动不可控,也很难建模
3、测量传感器哦存在误差
例:

不同的人测量硬币的直径,用Zk表示测量的结果,下标k代表第几次测量的结果,由于每个人测量的结果和尺子的误差可能会不一样,例如Z1=50.1mm,Z2=50.5mm,Z3=50.6mm。若要你估计一下真实结果,你可能第一时间会对上面的三个数据直接取平均值。
估计值
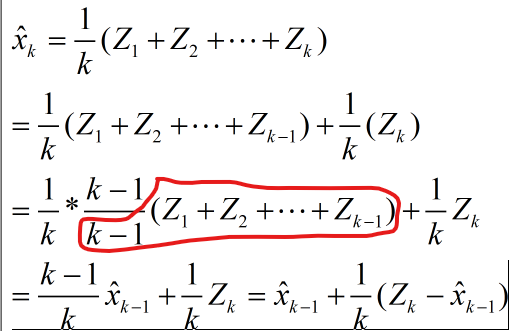
随着k的不断增大,1/k不断趋近于0,此时 趋近于
趋近于 ,可以看出随着k的增加,测量的结果就不重要了。当k比较小的时候,1/k会比较大,测量的结果就非常重要。
,可以看出随着k的增加,测量的结果就不重要了。当k比较小的时候,1/k会比较大,测量的结果就非常重要。
令1/k=kk

它的意思是: 当前的估计值=上一次估计值+系数*(当前测量值-上一次估计值);
kk在卡尔曼滤波中称为:卡尔曼增益
两个参数:
估计误差 (估计值与真实值之间的误差)、测量误差
(估计值与真实值之间的误差)、测量误差 (测量值与真实值之间的误差);
(测量值与真实值之间的误差);

(第k-1次的估计误差)除以(第k-1次的估计误差+第k次的测量误差)。
讨论:在k时刻,
1、 :当k-1次的估计误差远远大于第k次的测量误差,kk趋近于1,此时第k次的估计值趋近于第k次的测量值
:当k-1次的估计误差远远大于第k次的测量误差,kk趋近于1,此时第k次的估计值趋近于第k次的测量值 。
。
2、 :当k-1次的估计误差远远小于第k次的测量误差,kk趋近于1,此时第k次的估计值趋近于第k-1次的估计值。
:当k-1次的估计误差远远小于第k次的测量误差,kk趋近于1,此时第k次的估计值趋近于第k-1次的估计值。
卡尔曼思想解决一个简答问题:
step1:计算卡尔曼增益:
step2:计算估计值:
step3:更新估计误差(非常重要,之后推导):
下面是一个简单的例子。
图中的数据就是按照这三个步骤逐步出来的结果,图右侧是数据画出数据结果,其中蓝色的线是测量值的结果,另外一条是估计的结果,可以看出估计出的结果很快就趋近与实际值50,并且很稳定。
第一节初始卡尔曼滤波先到这,后面会具体对卡尔曼滤波进行推导。如果有错误的地方还请批评指正。谢谢。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号