第四章——训练模型(Training Models)
前几章在不知道原理的情况下,已经学会使用了多个机器学习模型机器算法。Scikit-Learn很方便,以至于隐藏了太多的实现细节。
知其然知其所以然是必要的,这有利于快速选择合适的模型、正确的训练算法、合适的超参数。了解底层有助于更有效率地调试问题以及平台错误。
本章从现行回归模型开始,讨论两种不同的训练方式:
- 直接使用解析解,例如一元二次方差的求根公式。
- 有些数学问题(比如大多数偏微分方程)是没有数值解的,这时候就要用数值解来近似求解。有时间为了效率,解释存在解析解,也是求近似的数值解。
4.1 线性回归(Linear Regression)
4.1.1 线性回归模型解析解
方程4-1.线性回归模型预测
$\hat{y} = \theta_0 + \theta_1x_1 + \theta_2x_2 + \dots + \theta_nx_n$
- $\hat{y}$是预测值
- $n$是样本总数
- $x_i$是第$i$个样本值
- $\theta_j$是第$j$个模型参数(包括偏置项$\theta_0$和特征权重$\theta_1,\dots,\theta_n$)
使用向量化的形式可改写为
$\hat{y} = h_{\theta}(X) = \theta^T \cdot X$
线性回归模型损失函数(cost function)
$MSE(X,h_{\theta}) = \frac{1}{m} (\theta^T \cdot X^{(i)} - y^{(i)})^2$
通过求偏导,求极值点,可得到
$\hat\theta = (X^T \cdot X)^{-1} \cdot X^T \cdot Y$
- $\hat\theta$是使得损失函数最小的$\theta$
- $Y$是目标值向量,包含$y^{(1)}$到$y^{(m)}$
4.1.2 计算复杂度(Computational Complexity)
求解析解时,有一个对$X^T \cdot X$求逆的操作,这是一个$n \times n$矩阵($n$是特征总数)。对这样一个矩阵求逆的复杂度大概是$O(n^{2.4})$到$O(n^{3})$(根据不同的实现方法有不同的结果,具体是怎么得到的,有空我再看看矩阵论吧)。
另一方面,训练样本数量对计算复杂度的影响是线性的,也就是$O(m)$,所有处理大训练集是高效的,只要内存足够。
4.2 梯度下降(Gradient Descent)
假设你迷失在山间并且浓雾袭来,你只能看到脚下山坡的斜率。快速下山的一个策略就是,没走一步都沿着最陡峭的斜坡下山。这也是梯度下降所采用的策略:计算损失函数关于当前参数向量$\theta$的梯度, 沿着梯度下降的方向改变$\theta$。当梯度为0时就取得了最小值。
梯度下降的一个重要参数是步长,由学习率这一超参数决定。学习率过小会延长训练时间,学习率太大又会导致不能收敛。而且并不只是所有的损失函数都是连续可微,并只有一个全局最优解的。不过MSE损失函数是凸函数,全局可微并只有一个极值点。
事实上,MSE的函数图像是碗形,但如果特征间取值尺度不同,它可能就是一个瘦长的碗形。在图4-7中,左侧训练数据的两个特征有相同的取值尺度。右侧特征1的取值要远小于特征2。

图4-7 Gradient Descent with and without feature scaling
左侧的梯度下降算法笔直地走向最低点,因为速度较快。而右侧绕了弯弯,这就需要较长的迭代时间。
当使用梯度下降时,首先确保特征具有相同的数据范围(比如使用Scikit-Learn’s StandardScaler进行处理)。
上图也阐明了,训练一个模型实际上就是寻找一组使得损失函数取值最小(在训练集上)的模型参数。这需要在模型的参数空间进行搜索,该空间维数越高越棘手。不过如果损失函数是凸函数,那就好多了。
4.2.1 批梯度下降(Batch Gradient Descent,BGD)
首先求个模型参数关于损失函数的偏导数:
$\frac{\partial }{\partial \theta_j} MSE(\theta) = \frac{2}{m} \sum_{i=1}^{m}(\theta^T \cdot X^{(i)} - y^{(i)})x_j^{(i)}$
本文中的$ \cdot$统一都是矩阵乘法,不是矩阵点乘。
除了单独计算每一个偏导数,我们也可以使用向量化的方式,统一计算所有的偏导数:
\begin{align*}
\nabla_\theta MSE(\theta) = \begin{pmatrix}
\frac{\partial }{\partial \theta_0} MSE(\theta) \\
\frac{\partial }{\partial \theta_1} MSE(\theta) \\
\vdots \\
\frac{\partial }{\partial \theta_n} MSE(\theta)
\end{pmatrix}
= \frac{2}{m}X^T \cdot (X \cdot \theta - Y)
\end{align*}
上面这个矩阵运算,$X$是$m \times n$矩阵,$m$是样本数,$n$是特征数。$X^T$是$n \times m$矩阵,$\theta$是$n \times 1$矩阵,$Y$是$m \times 1$矩阵。
注意到上式中每一次迭代,都要使用整个训练集来计算梯度。这就是该算法之所以被称为批梯度下降。当数据集巨大时会变得很慢。不过好的是,该算法在特征数较多时仍然表现良好。
迭代公式如下:
$\theta^{(next\ step)} = \theta - \eta \nabla_\theta MSE(\theta)$
其中$\eta$是学习率。可以使用网格搜索寻找合适的学习率。当然,为了识别出造成收敛过慢的学习率,我们还要设置迭代次数。迭代次数太小,可能还没有收敛;迭代次数过大,又会浪费时间。通常的做法是,设置一个很大的迭代次数,但是当偏导数的模小于某个极小值$\varepsilon$时,就停止迭代。
4.2.2 随机梯度下降(Stochastic Gradient Descent,SGD)
批梯度下降最大的问题就是每次迭代,都要使用整个训练集来计算梯度。而SGD是另一个极端:每次迭代,只随机选择一个样本来计算梯度。这使得一次迭代的计算量大大减小。这也可以来训练海量数据集,因为每次只选择一个样本放进内存去计算。SGD也可以用来实现在线学习算法(或者out-of-core algorithm)。
另一方面,由于SGD随机的属性,每次迭代会造成损失函数忽大忽小,不过在平均的意义上是减小的。迭代将停在最小值附近,但可能始终无法达到最小值。随意当算法结束,得到的参数是不错的,但不是最优。
当损失函数有多个极值点是,SGD比BGD更容易跳过局部最优而找到全局最优。
所以随机的优势是避免陷入局部最优,劣势是永远无法达到最小值。一个解决方案只逐步地减小学习率。刚开始时学习率比较大(这有助于加快进度以及避开局部最优),随后越来越小,最终得到全局最优。这一过程被称作模拟降温(simulated annealing)算法,因为它类似于冶金时金属的逐渐降温。决定每次迭代学习率的函数被称为学习计划表(learning schedule)。
4.2.3 最小批梯度下降(Mini-batch Gradient Descent)
Mini-batch GD每次计算梯度是,都会随机选择一批实例,这批实例被称作mini batches。Mini-batch GD优于SGD之处在于,前者可以利用矩阵运算的硬件优化,尤其是使用GPU时。并且前者更稳定,更容易接近最优质,但也更容易陷入局部最优。
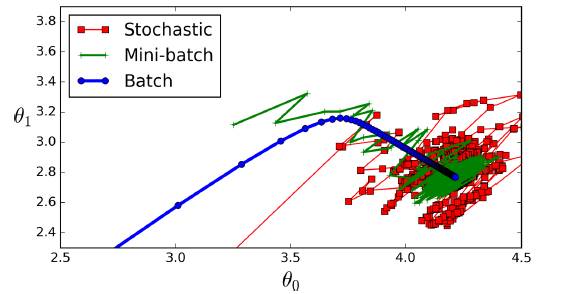
梯度下降在参数空间的路径
我们可以比较一下求解线性回归模型各种算法的优劣(m是训练样本数,n是特征数):
| Algorithm | Large m | Out-of-core support | Large n | Hyperparams | Scaling required | Scikit-Learn |
| Normal Equation | Fast | No | Slow | 0 | No | LinearRegression |
| Batch GD | Slow | No | Fast | 2 | Yes | n/a |
| Stochastic GD | Fast | Yes | Fast | $\geq$2 | Yes | SGDRegressor |
| SGDRegressor | Fast | Yes | Fast | $\geq$2 | Yes | n/a |
4.3 多项式回归(Polynomial Regression)
其实可以用线性回归模型拟合非线性数据,简单的做法是增加每个属性的次方作为新的属性。这被称作多项式回归。
m = 100 X = 6 * np.random.rand(m, 1) - 3 y = 0.5 * X**2 + X + 2 + np.random.randn(m, 1) >>> from sklearn.preprocessing import PolynomialFeatures >>> poly_features = PolynomialFeatures(degree=2, include_bias=False) >>> X_poly = poly_features.fit_transform(X) >>> X[0] array([-0.75275929]) >>> X_poly[0] array([-0.75275929, 0.56664654])
上面的代码只有一个属性$x$,使用二次函数对其拟合,只需要增加一个$x^2$的属性即可。
如果训练样本有多个属性,还要增加不同属性的组合,作为新的属性。例如,有$a$、$b$两个属性,需要增加的新属性有:$a^2$、$a^3$、$b^2$、$b^3$、$ab$、$ab^2$、$a^2b$。
PolynomialFeatures(degree=d)将$n$个特征扩充为$\frac{(n+d)!}{d!n!}$个特征。 其实就是n元d次完全多项式的项数,至于这个排列组合问题是怎么求解的,我还没搞明白。
4.4 学习曲线(Learning Curves)
学习曲线就是绘制出随着训练集的增大,模型在训练集和测试集上的性能。
作者在最后提到了The Bias/Variance Tradeoff。之前一直行不通这里的Bias和Variance该怎么翻译。Bias不是上文提到的偏置项,Variance也不应该翻译为方差。Understanding the Bias-Variance Tradeoff这篇文章讲的挺好的。我只读了这篇文章的1.1和1.2,有空翻译一下整篇文章。
我们先介绍一下Bias和Variance
Bias衡量了模型预测的精准性,也就是平均预测值和真实值的差异。平均预测值,是指使用不同的训练数据,分别对模型进行训练,然后进行预测。Bias可以简单地理解为训练集的误差,Bias越大,训练集误差越大。
Variance衡量了模型预测的确定性,也就是对同一个样本点预测稳定性。对于一个给定的待预测样本点,使用不同的训练数据分别训练模型,然后进行预测。这组预测值的方差越小,则该模型越稳定。这跟预测的准不准没关系,只看预测的稳不稳。对于分类问题,Variance越小,决策边界受到训练数据的影响就越小。Variance太大,不同的训练集会得到差异很大的决策边界。
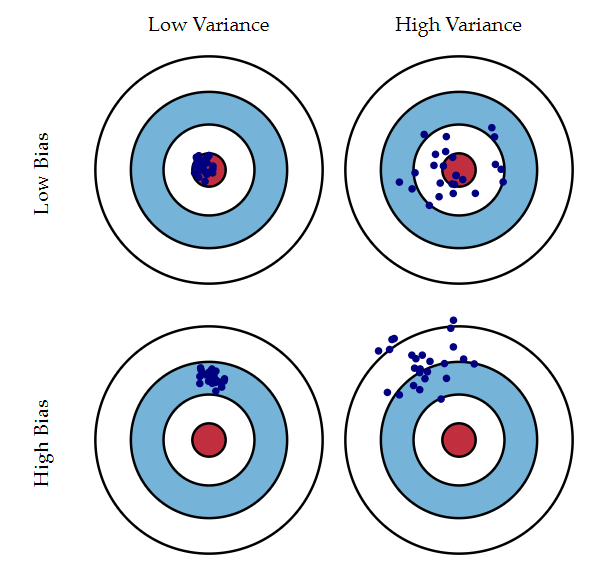
上图描述了二者之间的关系。这是用不同的训练数据对模型进行训练,每次训练之后都对测试集的一个确定的样本点进行预测,小蓝点是预测值,红圈的正中心是真实值。
通常情况下,对于一批训练数据,使用不同的模型,Bias和Variance此消彼长的。
机器学习的错误一般分为以下三类:
- high-Bias:一般是优化假设有误,比如假设数据是线性的,实际上是二次的。这种模型对训练数据欠拟合
- high-Variance:这是由于模型对训练数据的微小变化过于敏感。高自由度的模型(比如高纬度的多项式)容易造成high-Variance,这种模型对训练数据过拟合。
- Irreducible error:这是由于数据自身的噪音,智能通过数据清洗解决,比如删除离群点。
降低模型复杂度会增加Variance,减小Bias。反之亦然。
4.5 线性模型正则化(Regularized Linear Models)
4.5.1 岭回归(Ridge Regression)
$J(\theta) = MSE(\theta) + \alpha\frac{1}{2}\sum_{i=1}^{n}\theta_i^2$
对损失函数增加正则项,降低模型复杂度,降低过拟合的风险。其中$\alpha$是个超参数。
需要说明的是,
- 训练模型时增加正则项,但是用测试集评估模型时,就不能使用正则项了。模型训练和模型评估使用不同的损失函数是很常见的。除了正则化,另一个原因是训练时的损失函数需要便于求导,但是在测试集评估时就要与目标值尽可能接近。例如,逻辑回归在训练时使用log loss作为损失函数,但是评估时使用精度/召回率。
- $\theta_0$不进行正则化。
- 训练之前,统一数据不同属性的取值范围很重要(比如使用StandardScaler),绝大多数的正则化模型都需要这么做。
岭回归解析解:
$\hat\theta = (X^T \cdot X + \alpha A)^{-1} \cdot X^T \cdot Y$
其中,$A$是个近似的$n \times n$的单位矩阵,只是左上角是个0。其实正则化带来了一个额外的好处,那就是矩阵$(X^T \cdot X + \alpha A)$一定可逆(听吴恩达课的时候,他说的一定可逆,但我没有去研究数学原理,矩阵论忘得差不多了),从而解析解一定存在。但是求线性回归解析解时,$(X^T \cdot X )^{-1}$可能是不可逆,尤其是特征数远远大于样本数时。
4.5.2 Lasso Regression
损失函数:
$J(\theta) = MSE(\theta) + \alpha\sum_{i=1}^{n}\left | \theta_i \right |$
Lasso回归倾向于去除掉最不重要的特征(也就是将其权重设置为0)。

图4-19 Lasso和Ridge正则化对比
在上图左上角中,背景的椭圆轮廓代表为正则化的MSE损失函数(也就是$\alpha$为0),小白点代表该损失函数的BGD路径。前景的菱形代表$l_1$惩罚(也就是设置$\alpha \rightarrow \infty$),小黄三角代表该惩罚的BGD路径。这一路径首先到达$\theta_1 = 0$的点,然后到达$\theta_2 = 0$的点。右上角代表Lasso回归并设置$\alpha = 0.5$。其BGD路径也倾向于一个参数值先达到0。相似的,小面两幅图使用的是$l_2$正则项。与未正则化相比,$l_2$正则的参数项更接近于$\theta = 0$点,但是并没有那个参数值被干掉。
Lasso回归在$\theta_i = 0$点是不可微的,梯度下降依然可以工作,如果使用次梯度(作者解释说,次梯度可以理解为不可微点周围梯度的中间值)。
4.5.3 Elastic Net
Elastic Net介于Ridge回归和Lasso回归之间,损失函数如下:
$J(\theta) = MSE(\theta) + \gamma \alpha\sum_{i=1}^{n}\left | \theta_i \right | + \frac{1-\gamma}{2}\alpha \sum_{i=1}^{n}\theta_i^2$
Ridge一般是个不错的选择。如果你怀疑只有一部分样本时有用的,那可以选择Lasso或者Elastic Net,因为它们倾向于将不重要特征的权重设置为0。Elastic Net比Lasso表现会好一些,由于后者在特征数多于实例数或者一些特征间存在强关联时,会表现得不稳定。
4.5.2 提前停止训练(Early Stopping)
对于迭代学习算法,除了上面提到的,还有一种完全不同的正则化方式,那就是当校验集的误差达到最小时,就提前停止训练,这被称作Early Stopping。
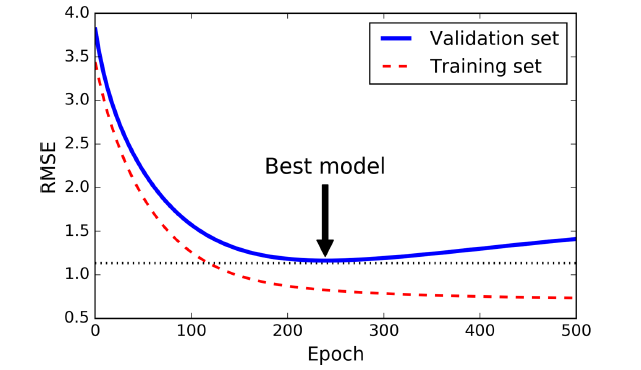
图4-20. Early stopping正则化
上面显示了使用BGD训练一个复杂模型(比如高阶多项式回归)。在训练前期,伴随着迭代周期的增长,训练集和校验集的RMSE都在减小。但是随后校验集的误差开始增大,这表明模型开始过拟合训练数据。我们在校验集误差最小的训练周期停止训练。
4.6 逻辑回归(Logistic Regression)
4.6.1 评估概率(Estimating Probabilities)
和线性回归类似,逻辑回归也是计算输入特征的加权和(再加上偏置项),但与前者直接输出计算结果不同,后者返回计算结果的逻辑(logistic)。
逻辑回归模型评估概率(向量化形式):
$\hat{p} = h_\theta(X) = \sigma(\theta^T \cdot X)$
logistic,也被称作logit,记做$\sigma(\cdot)$,是一个sigmoid函数(比如S形函数)。
$\sigma(t) = \frac{1}{1 + e^{-t}}$
$\hat{y} = \left\{\begin{matrix} 0 \ if \ \hat{p}<0.5 \\ 1 \ if \ \hat{p}\geq 0.5 \end{matrix}\right.$
4.6.2 训练和损失函数(Training and Cost Function)
逻辑回归损失函数(log loss) :
$J(\theta) = -\frac{1}{m}\sum_{i=1}^{m}\{ y^{(i)}log(\hat{p}^{(i)}) + (1 - y^{(i)})log(1 - \hat{p}^{(i)}) \}$
其实,$-J(\theta)$是个极大似然估计等价的。
似然函数定义如下:
$L(\theta) = \prod_{i=1}^n p(Y=y_i|X=x_i) = \prod_{i=1}^n p(x_i)^{y_i}(1-p(x_i))^{1-y_i}$
根据极大似然估计,我们要求出使得$L(\theta)$最大的$\theta$。对等式左右两边取log操作,即可得到跟log loss类似的形式。
log loss求解最小值没有解析解形式,但是该函数是凸函数,可以用梯度下降进行求解。
4.6.3 决策边界(Decision Boundaries)
4.6.4 Softmax Regression
后面这两小节不太重要,以后有时间再补充吧。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号