
Temporal-Difference Learning for Prediction
In Monte Carlo Learning, we've got the estimation of value function:

Gt is the episode return from time t, which can be calculated by:

Please recall, Gt can be only calculated at the end of a given episode. This reveals a disadvantage of Monte Carlo Learning: have to wait until the end of episodes.
TD(0) algorithm replace Gt of the equation to the immediate reward and estimated value function of the next state:

The algorithm updates the Estimated State-Value Function at time t+1, because everything in the equation is determined. This means we will wait until the agent reaching the next state, so that the agent can get the immediate reward Rt+1 and know which state the system will transition to at time t+1.
The equations below are State-Value Function for Dynamic Programming, in which the whole environment is known. Compare to these equations:

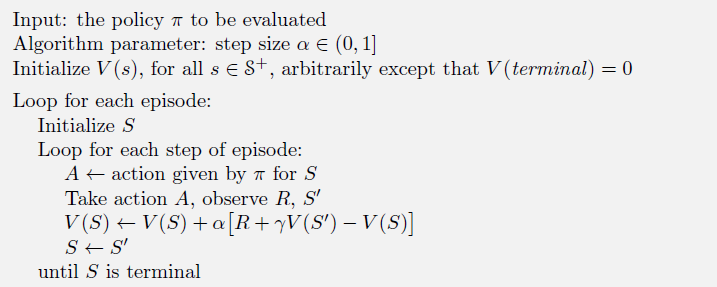
TD algorithm is quite like 6.4 Bellman Equation, but it does not take expectation. Instead, it uses the knowledge till now to estimate how much reward I am going to get from this state. The whole algorithm can be demonstrated as:
TD Target, TD Error
Bias/ Viriance trade-off
Bootstraping

 浙公网安备 33010602011771号
浙公网安备 33010602011771号