




长时间的死区严重限制了PI控制器的性能。
这是因为PI控制器不知道死时间,当实际输出y与期望的设定值ysp不匹配时反应太“不耐烦”。
每个人在淋浴时都经历过类似的现象,水温需要很长时间来调整。
在那里,不耐烦通常会导致用滚烫的热水和冰冷的冷水交替责骂。
一个更好的策略是等待温度设置的变化生效,然后再进行进一步的调整。
一旦我们知道什么旋钮可以提供我们最喜欢的温度,我们就可以在淋浴反应所需的时间内得到合适的温度。
这种“最优”控制策略是史密斯预测方案背后的基本思想。
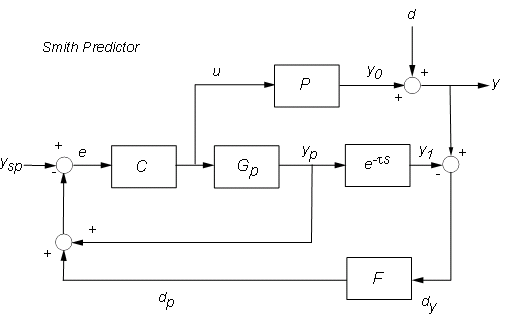
史密斯预测器使用内部模型Gp来预测过程的无延迟响应yp(例如,给定的旋钮设置将产生什么样的水温)。
然后将这个预测yp与期望的设定值ysp进行比较,以决定需要进行哪些调整(控制u)。
为了防止漂移和拒绝外部干扰,Smith预测器还将实际过程输出与考虑了死区时间的预测y1进行比较。间隙dy=y-y1通过滤波器F反馈,影响整体误差信号e。
注意,在等待足够长的时间让淋浴反应后,dy等于感知到的温度不匹配。
对于F,使用一个20秒时间常数的一阶滤波器来捕获低频干扰。
 posted on
posted on


 浙公网安备 33010602011771号
浙公网安备 33010602011771号