

CTC
资料
资料查询:
CTC Loss 数学原理讲解:Connectionist Temporal Classification
教程:Connectionist Temporal Classification详解补充
CTC Algorithm Explained Part 1:Training the Network(CTC 算法详解之训练篇
源代码:
https://github.com/pytorch/pytorch/blob/main/aten/src/ATen/native/LossCTC.cpp
Connectionist Temporal Classification A Tutorial with Gritty Detail
简述
CTCLoss是一种无需数据对齐的损失函数,常用于图像文本识别和语音识别,解决了RNN处理序列数据时长度不一致的问题,通过Forward-Backward算法计算概率,并在训练中使用
CTC即论文中的 Connectionist Temporal Classification,连续形式的时序数据分类,指使用递归神经网络来标记非分段序列数据
背景
标准神经网络的目标函数是为训练序列中的每个点分别定义的,也就是对单个点计算损失,网络的目标函数是所有数据点损失的平均或求和。在训练时,模型可以针对单个数据点计算损失并更新参数,不需要同时考虑其他数据点的误差,因此可以视作各个数据点是相互独立的
基于这一点,以及不考虑跨时间步或者自监督(如BERT)的特性,RNN似乎只能训练一系列独立的标签分类,这意味着训练的序列数据必须被预分段并标记
但标记未分割序列数据是现实世界序列学习中普遍存在的困难问题,尤其是感知任务,如图像文本识别OCR,语音识别ASR,在这些领域中,所面临的一个问题是神经网络的输出与ground truth[1]的长度不一致,导致loss难以计算
例如在OCR中,存在两个问题:
- 长度不一致:输入时间步数(如图像划分的块数)和输出标签数(如字符数)通常不同
如一张图片被划分为100个时间步,但输出文本可能只有5个字符
- 位置模糊性:无法确定输出标签具体对应输入序列的哪一部分
同样是图片中,一个字符可能跨越多个划分的图像中,一个划分后的小部分也可能包含多个字符的混合
由于连续序列数据的对齐难题,学者提出了一种不需要对齐的Loss计算方法:CTC Loss
总体思想
CTC Loss的计算对象是神经网络经过softmax归一化后的输出矩阵和ground truth,并且CTC Loss不要求输出矩阵和ground truth的大小相同,输出矩阵的维度为\(N \times T\),其中 \(N\) 是类别数,\(T\) 为语音长度
CTC Loss是训练阶段的监督信号,用于调整序列分类模型的参数,具体流程:
- 模型输出:输入序列 \(x\) 经过神经网络(如RNN、Transformer)后,输出每个时间步的标签的概率分布 \(y_k^t\)(输出矩阵)
- 计算CTC Loss:基于 \(y_k^t\) 和真实标签序列l,通过Forward-Backward算法计算 \(p(l | x)\),并得到负对数似然损失
- 反向传播:利用梯度更新模型参数,使得 \(p(l \mid x)\) 最大化
模型在每个时间步输出标签的概率分布 \(y_k^t\) ,这些概率的连乘构成路径概率 \(p(\pi | x)\) ,CTC通过边缘化对齐路径并计算损失后,调整这些概率分布,使得所有有效路径的联合概率最大化
定义 \(S\) 是从固定分布 \(D_{\Chi \times Z}\) 中采样的训练集,其中
- 输入空间(预测值)\(\Chi = (\mathbb{R}^m)^*\) 是所有 \(m\) 维实值向量序列的集合;
- 目标空间(ground truth)\(Z = L^*\) 是有限字母表 \(L\) 中所有符号序列的集合。
定义字符集 \(L' = L \cup \{\text{blank}\}\)。
\(S\) 中的每一个训练样本由一对序列 \((x, z)\) 组成,其中
- 输入序列 \(x = (x_1, x_2, \dots, x_T)\),
- 目标序列 \(z = (z_1, z_2, \dots, z_U)\)。
序列数据预测任务中的一个基本原则是:真实值的长度不能超过预测值的长度[2],即
我们的目标是使用训练集 \(S\) 训练一个时序分类器(temporal classifier) ,使得模型能生成正确的标签序列 \(\mathcal{l}\)
定义 \(y_k^t\) 表示在时刻 \(t\) 时真实字符为 \(k\) 的概率。通俗来讲,\(y_k^t\) 是经过 softmax 之后的输出矩阵中的一个元素。
将字符集 \(L'\) 可以构成的所有序列的集合称为 \((L')^T\),显然 \((L')^T\) 包含 \(|L'|^T\) 个序列。
将 \((L')^T\) 中的任意一个序列称为路径,并标记为 \(\pi\)。
\(\pi\) 的分布(即给定输入序列 \(x\) 后,路径 \(\pi\) 出现的概率)为:
公式(1)是将路径 \(\pi\) 中每一个字符出现的概率进行连乘,其前提条件是假设每个时刻的字符都是相互独立的,即 RNN 在不同时刻的输出是相互独立的。
定义多对一(many-to-one)映射
例如:
可通过映射 \(B\) 计算得到标签 \(l \in L^{\le T}\) 的条件概率,为对应于 \(l\) 的所有可能路径的概率之和:
以 \(l = \text{aab}\) 为例,所有可以通过映射 \(B\) 得到 "aab" 的路径称为 \(B^{-1}(l)\),例如路径 "a - ab -" 和 "-aa - aab" 均属于 \(B^{-1}(l)\)。
这一步解决了长度不一致的问题。
我们希望 \(p(l \mid x)\) 越大越好,因此分类器 \(h\) 的输出是使 \(p(l \mid x)\) 最大的 \(l\),即
CTC的Loss函数也是基于这个目标设计的
传统的需要数据对齐的损失函数是基于每一帧数据(单个数据点)来最小化误差,而 CTC 的目标是基于整个训练序列来最大化 \(p(l \mid x)\) 。
把寻找 \(\operatorname*{argmax}_{l \in L^{\le T}}\ p(l \mid x)\) 的路径的任务称为解码。最简单的解码方式自然是暴力穷举计算,但其计算复杂度极高。
以 25 ms 的语音作为一帧,则长度为 1 秒的语音包含 40 帧。考虑一段 5 秒长(200 帧)的英文语音,其输出矩阵包含 \(27^{200} \approx 1.87 \times 10^{286}\) 条路径,几乎无法计算。
为了简化计算,借鉴 HMM(Hidden Markov Model,隐马尔可夫模型)中的 Forward–Backward 算法思路,利用动态规划算法求解。因此 CTC Loss 本质上是一种动态规划算法(Dynamic Programming, DP)。
如果只是单向的DP也可以得到整条路径的概率,但是通过前向和后向概率的乘积,就可以得到当前某个标签在所有有效路径中的贡献,更新时可以对单个位置调整概率分布
Forward-Backward 算法
合法路径的约束条件
根据我们的映射规则以及为了使得所有路径在图中都有唯一的、合法的表示,我们需要设定一些约束(基于我们已经将blank插入了相邻的字符之间):
- 转换只能往右下方向,其他方向不允许
- 相同的字符之间起码要有一个空字符
- 非空字符不能被跳过
- 起点必须从前两个字符开始(因为第一个字符是blank可以跳过)
- 终点必须落在结尾两个字符
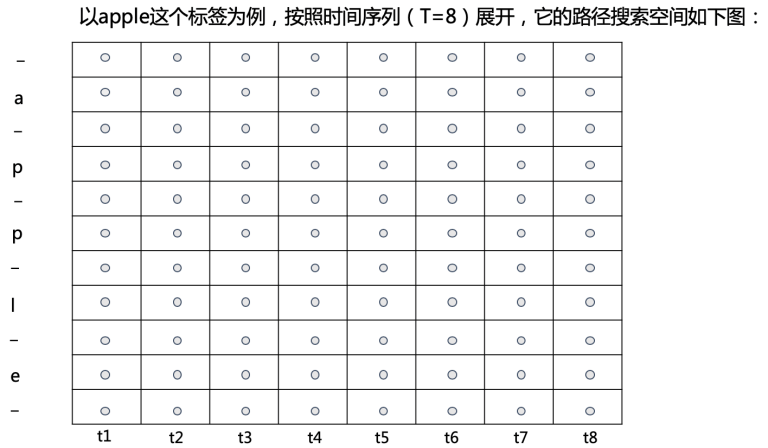
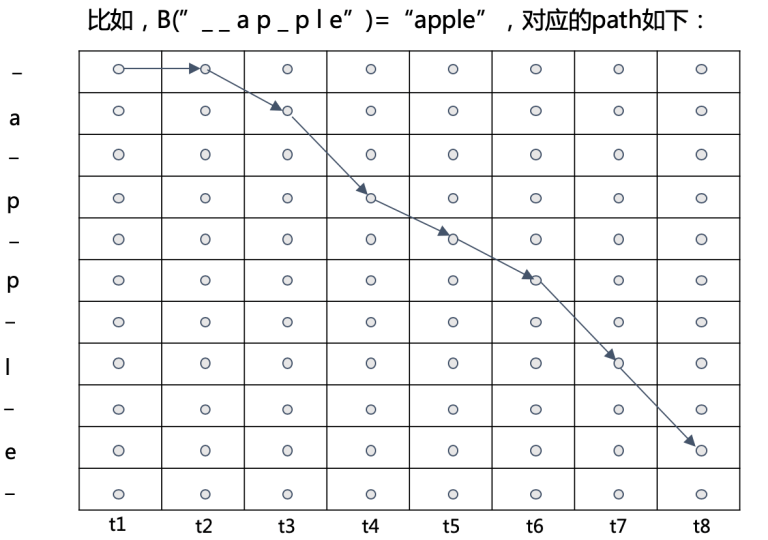
这些约束规则导致合法路径的数量大大减少,根据以上约束规则,所有映射为 \(l\) = apple 的合法路径为

Forward-Backward算法的数学推导
给定一个长度为 \(r\) 的序列 \(q\),记
- \(q_{1:p}\) 为序列 \(q\) 的前 \(p\) 个元素;
- \(q_{r-p:r}\) 为序列 \(q\) 的后 \(p\) 个元素。
对于 ground-truth 标签 \(l\),定义前向变量
来表示序列 \(l_{1:s}\) 在时刻 t 的全概率
其中
-
\(\prod_{t'=1}^{t} y_{\pi_{t'}}^{t'}\) 表示子序列 \(\pi_{1:t}\) 的联合概率(全概率);
-
\(B(\pi_{1:t})=l_{1:s}\) 表示:在所有长度为 \(t\) 的子序列 \(\pi_{1:t}\) 中,只有那些经映射 \(B\) 后等于目标前缀 \(l_{1:s}\) 的才被计入求和。
-
约束:\(t \ge s\)。
示例:\(\pi_{1:6} = \{\texttt{-c a a - t}\}\) ,长度为 \(t=6\),目标前缀 \(l_{1:3}=\texttt{cat}\) 长度为 \(s=3\)。
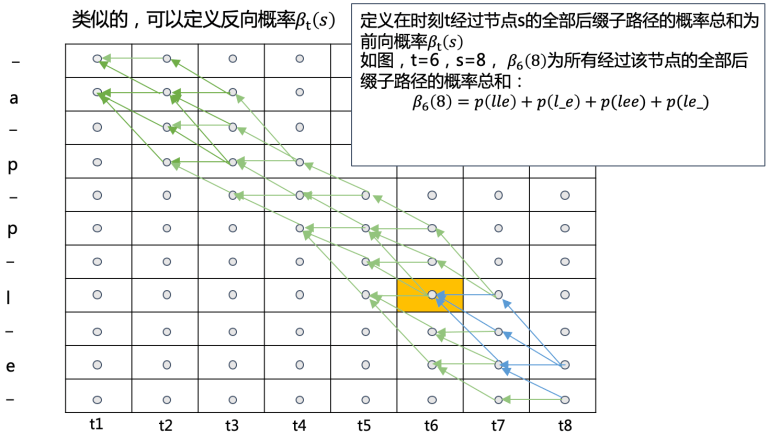
类似地,定义后向变量
其中
- 求和范围是所有满足 \(B(\pi_{t:T})=l_{s:|l|}\) 的子序列 \(\pi_{t:T}\);
- \(\prod_{t'=t}^{T} y_{\pi_{t'}}^{t'}\) 表示从时刻 \(t\) 到 \(T\) 的联合概率。
前向和反向过程计算示意图如下,这些概率都可以递归求解,或者说,某个前缀的概率是更长前缀概率的子问题,因此可以用动态规划求解
然后通过前向概率和后向概率就可以计算 CTC Loss。
以前向过程为例, \(\alpha_t(s)\) 可以通过 \(\alpha_{t-1}(s)\) 和 \(\alpha_{t-1}(s-1)\) 计算得到,并不需要直接计算 \(p(l|x)\),而是通过递归的方式来得到 \(p(l|x)\)。后向过程同理,\(\beta_t(s)\) 可以通过 \(\beta_{t+1}(s)\) 和 \(\beta_{t+1}(s+1)\) 计算得到。
用 \(y_t^k\) 表示在时刻 \(t\) 时真实字符为 \(k\) 的概率。用 \(b\) 表示 blank,则可定义初始状态:
CTC Loss 的前向过程为:
如果是\(l'_{s-2} = l'_s\),意味着目标序列中相邻两个字符是相同,那么根据我们的约束条件,当前状态不能从\(\alpha_{t-1}(s-2)\)处转移得到,而如果\(l'_s = b\),那说明\(s - 1\)是一个有效字符,如果直接从\(s-2\)转移那么会跳过该字符,这同样是不允许的,因此这两种情况特殊判断;其他情况即可以在当前位置继续向右移动,或者从blank处转移,或者直接从上一个有效字符处转移
后向过程的递推公式与(8)类似,此处省略。
这种方法可以比较直观简单地得到\(p(l|x)\),但一定程度上可能会造成数值下溢的问题
CTC的训练
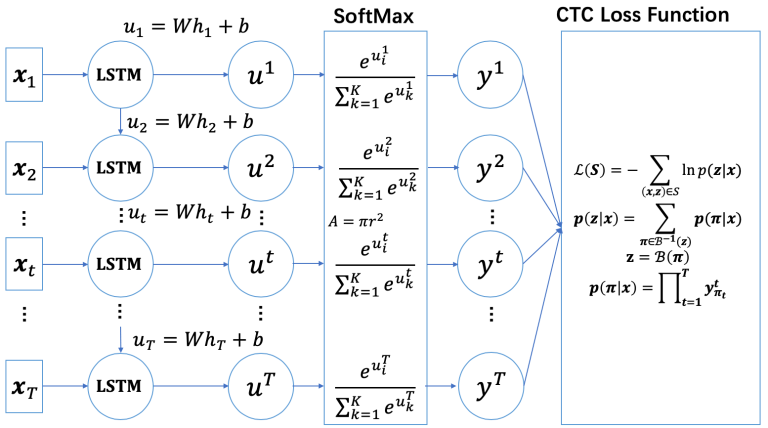
通过上面的计算过程可以知道,CTC是使用一种概率的形式来表示目标路径的,作为一种概率方法,采用常用的最大似然方法训练 CTC。模型训练的目的是同时最大化训练集中所有正确分类的概率,最大化 $ p(\ell \mid \mathbf{x}) $ 即最小化目标函数(CTC Loss函数):
采用梯度下降法训练网络,则需要对式(11)求导。由于训练集中的样本是独立的,可以对每组样本 \((\mathbf{x},\ell)\in S\) 单独求导,即
损失函数必须是数学形式可导的,于是接下来考虑使用 Forward-Backward 算法计算公式(12)。已知:
则对于任意时刻 t ,都有:
以\(T = 6,\ l=ab\) 且 \(t\) 取4, \(s\) 取3,说明式13
-
前向过程共有 4 条路径,均满足
\(\pi \in \mathcal{N}^T,\ \mathcal{B}(\pi_{1:t=4}) = \ell_{1:s=3} = \texttt{"-a-"} = \texttt{"a"}\)
-
后向过程共有 3 条路径,均满足
\(\pi \in \mathcal{N}^T,\ \mathcal{B}(\pi_{t=4:T=6}) = \ell_{s=3:|\ell|=5} = \texttt{"-b-"} = \texttt{"b"}\)
以 \(y_{\ell'_s}^t\) 表示图中 \((t=4,s=3)\) 节点的概率,则共有 \(3 \times 4 = 12\) 条经过节点 \(\ell_s\) 的路径可以通过映射获得 \(\ell = \texttt{ab}\)。3 为前半部分的路径条数,4 为后半部分的路径条数,两两组合即为所有可能的情况,这些路径表示为
其中任意一条路径的全概率可以表示为
\(\alpha_4(3)\) 和 \(\beta_4(3)\) 的全概率计算公式中均包含 \(y_{l'_s}^t\),则 \(\alpha_4(3)\,\beta_4(3)\) 中包含 \({y_{l'_s}^t}^2\),因此可得 公式 (13):
简单来说,\(\alpha_t(s)\)表示了路径的前半部分,\(\beta_t(s)\)代表了路径的后半部分,我们从这两者中任意拿出一项都是可以组合成一条完整的路径的,不过因为这两项都包含了 \((t, l_s')\) 这一节点,因此乘积为
这是乘积中的一项,代表了其中一条合法路径,而 \(\alpha_t(s)\) 和 \(\beta_t(s)\) 的乘积是所有的路径,所以式(13)的累加符号中为 \(\mathcal{B}(\pi)=l\)
将式 (13) 变形后和式 (1) 的形式,即 \(p(\ell \mid \mathbf{x}) = \sum_{\pi \in \mathcal{B}^{-1}(\ell)} \prod_{t=1}^T y_t^{\pi_t}\),对比
知 \(\frac{\alpha_t(s)\beta_t(s)}{y^t_{\ell'_s}}\) 是所有经过\(l'_s\)的路径的集合(的概率),于是对所有满足 \(\pi_t = \ell'_s\) 的路径集合,在任意时刻 \(t\),可以得到
\(\frac{\alpha_t(s)\beta_t(s)}{y^t_{\ell'_s}}\) 保证了是所有经过 \(l'_s\) 的有效路径的集合,同时任何有效路径 \(\pi \in \mathcal{B}^{-1}(l)\) 在时间 t 必须经过某个 \(l_s'\),即所有有效路径按 \(\pi_t\) 的值被分到不同 s 的\(\frac{\alpha_t(s)\beta_t(s)}{y^t_{\ell'_s}}\)中,求和 \(\sum_s\) 又覆盖了所有可能的\(\pi_t\),等价于覆盖了所有的有效路径,并且与时间 t 无关,所以得到的结果就是有效路径的概率和,为 \(p(\ell \mid \mathbf{x})\)
式(15)使我们可以对上面的求导形式继续计算,令 \(lab(l,k)=\{s\mid l'_s=k\}\) ,也就是扩展序列 \(l'\) 中所有等于标签 k 的位置 s 的集合,例如目标序列\(l = [A, B]\),扩展序列 \(l' = [-, A, -, B, -]\),若 \(k = -\),则 \(lab(l, -) = {1, 3, 5}\)
之所以需要定义这个集合,是因为我们要计算偏导,而 \(y_k^t\) 仅影响那些 \(l_s' = k\) 的项,即 \(s \in lab(l, k)\),其余项的导数就为0
于是 \(\sum_{s\in lab(l,k)}\frac{\alpha_t(s)\beta_t(s)}{y_k^t}\) 表示在 \(t\) 时刻经过 \(l'_s = k\) 的所有路径的集合
式 (15) 对 \(y_k^t\) 求导,因为 \(\alpha_t(s)\beta_t(s)\) 中并不包含 \(y_k^t\) 相关的项,因此只需要对 \(\frac{1}{y_k^t}\) 求导,得到结果如下:
则目标函数关于网络经过 softmax 归一化后的输出数据的偏导数为:
为了通过 softmax 层进行梯度反传,我们需要得到目标函数关于未经过 softmax 归一化的参数 \(u_k^t\) 的导数
\(u_k^t\)是 softmax 层的输入(logits),即在时间步 t 对标签 k 的未归一化得分,\(y_k^t\) (标签概率)定义为 \(y_k^t = \frac{e^{u_k^t}}{\sum_{k'}e^{u^t_{k'}}}\)
\(\mathcal{L}\)是指负对数似然,也就是\(-log\ p(l | x)\),\((x, z)\) 表示输入数据 \(x\) 和真实标签序列 \(z\)(即 \(l\) ),\(N_w\) 指的是神经网络模型,参数为 \(w\),这种写法强调损失函数依赖于输入数据、真实标签和参数模型
\(\mathcal{L}\) 对 \(y_{k'}^t\) 的梯度由式(16)得到(注意 \(\mathcal{L}\) 是负对数似然)
\(y_k^t\) 对 \(u_k^t\) 的梯度,即为softmax的导数,简单起见,用一般softmax形式表示,即\(y_j = \frac{e^{u_j}}{\sum_i e^{u_i}}\),计算\(\frac{\partial y_j}{\partial u_k}\)
- \(j = k\) 时有:
- \(j \neq k\) 时,\(\frac{\partial e^{u_j}}{\partial u_k} = 0\),也就是分子的第一项为0,此时\(\frac{\partial y_k}{\partial u_k} = - y_jy_k\)
- 于是softmax 的 Jacobian矩阵 的元素用示性函数表示就是 \(y_j(𝕀(j = k)-y_k)\))
注意这里链式法则不能简单地表示成\(\frac{\partial \mathcal{L}}{\partial u_k^t} = \frac{\partial \mathcal{L}}{\partial y_k^t}\cdot\frac{\partial y_k^t}{\partial u_k^t}\),如果这样写那隐含了一个假设,也就是 \(y_k^t\) 只依赖于 \(u_k^t\),即输出之间是独立的,但在结构化预测(如RNN)中,输出 \(y_k^t\) 通常是依赖于整个输入序列 \(u^t = {u_1^t, u_2^t, \cdots}\) 的,这从softmax的分母是个累加中也能看出,所以在结构化模型中必须考虑所有可能的路径,因此需要对所有可能的 \(y_{k'}^t\) 求和:\(\frac{\partial\mathcal{L}}{\partial u_k^t}=\sum_{k'}\frac{\partial\mathcal{L}}{\partial y_{k'}^t}\cdot\frac{\partial y_{k'}^t}{\partial u_k^t}\),这个求和反映了 \(u_k^t\) 的变化可能通过多个 \(y_{k'}^t\) 影响最终的损失
再带入上面得到的式子后即可得到导数,计算过程中注意,因为我们的 \(k'\) 实际就是遍历了所有可能的情况,因此 \(\sum_{k'} \frac{1}{y_{k'}^t}\sum_{s \in lab(l, k')}\alpha_t(s)\beta_t(s)\)
从直接的形式上看,前一项 \(y_k^t\) 是模型当前预测的概率,可理解为模型认为是标签 k 的置信度,后一项的分子表示所有经过 k 的有效路径的概率和,分母可看作是归一化因子,来确保梯度比例合理
这个损失函数类似于分类任务中的标准Softmax,不过这里使用了路径概率的加权和替代了硬标签 \(𝕀(k = k')\)
如果 k 是正确标签,那么后一项的数值趋近于 1,因为有大多数有效路径经过 k ,因此这个求和值接近于 \(p(l \mid x)\),于是 \(\frac{\partial{\mathcal {L}}} {\partial{u_k^t}} \approx y_k^t - 1\),而 \(y_k^t \in (0, 1)\),所以梯度为负,则根据更新公式,\(u_k^t\) 增加,\(y_k^t\)增加,即正确标签概率增大;相反, k 是错误标签时,目标项趋于 0,梯度为正,于是标签概率减小
公式 (17) 中所有参数均可以通过线性计算得到,因此 CTCLoss 可以对网络中任意一个参数求偏导以实现参数更新。
Forward-Backward的结果正是分子中的概率和,从而能明确每个时间步的标签如何影响整体序列概率,进而基于此来调整概率分布
以单层LSTM作为RNN网络,RNN-CTC模型的总体结构为:
解码算法
与一般的离散型数据和对齐的序列数据的预测任务不同,在没有对齐的序列数据学习问题中,模型的预测过程本质是一个空间搜索过程,称为解码过程(也就是在模型的推理(测试)阶段使用)。
因为在对输入输出对齐的任务中,模型可以一对一预测每个位置的输出,而在没有对齐的信息中,模型不能直接一步得出整个输出,而是需要一步一步地生成一个序列,而每一步都取决于之前生成的内容,换言之,是从大量可能的输出中搜索出一个合理的输出序列,因此称为一个搜索空间的问题
如何在限定的时间条件下搜索到最优解是一个非常有挑战性的问题。尽管我们并不知道通用的、易处理的解码算法,但如下解码算法在实践中证明具有良好的解码结果:
(1) 最佳路径解码(Best Path Decoding)
\(\pi^*\) 选择每个时刻上概率最大的符号作为最佳路径。这也是预测离散型数据和对齐的序列数据的解码方式。
最佳路径解码计算起来很简单,但并不能保证:\(B(\pi^*) = \arg\max_{l \in L^{\le T}}\ p(l \mid x)\)
这个问题主要来自于我们最大化的目标是标签序列 \(l\) 的总概率,是多个路径的概率之和,但是最佳路径解码中, \(\pi*\) 只选择了其中概率最大一个路径,再得到对应的标签序列,而单一的路径概率显然无法和标签序列概率等价
较为合适的就是使用 Beam Search Decoding (束搜索解码)或者 Prefix Search (前缀搜索解码)
(2) 束搜索解码(Beam Search Decoding)
束搜索是一种近似搜索策略,用来在指数级搜索空间中高效找出前若干个最可能的序列
在CTC 解码中,束搜索的流程大致如下:
- 从左到右处理每个时间步 t
- 在每个时间步保留 top B 个概率最大的前缀路径 (即 beam width = B)
- 对每个前缀,尝试扩展所有可能的下一个字符
- 合并那些 collapse 后相同标签序列的路径
- 最终从所有路径中选择概率最大的 collapse 结果
在这个算法中合并了多个高概率路径,能避免最佳路径法中的“路径贪心”问题
(3) 前缀搜索解码(Prefix Search Decoding)
前缀搜索解码能确保找到最优解,但最坏情况下耗时可能会随着序列长度呈指数增长。
它是束搜索的一个特殊形式,但比普通束搜索更贴合 CTC 的动态规划结构
核心思想是:
- 枚举每一个标签序列前缀 \(l\) ,维护两种概率:
- 以 blank 结尾的路径的概率 \(p_{blank}(l, t)\)
- 以非 blank 结尾的路径的概率 \(p_{nonblank}(l, t)\)
- 相当于动态规划中的两个状态 \(dp[0/1]\)
- 然后递归更新当前前缀的概率(来自上一时间步)
- 最终累加所有前缀结尾为 \(l\) 的路径概率,得到 \(p(l \mid x)\)
CTC Loss 的优缺点
CTC最大的优点是不需要数据对齐,此外,因为CTC Loss依据概率计算,于是可以无缝地用于任何逐步输出概率分布的神经网络模型
CTC的缺点来源于三个假设或约束:
-
输出独立性假设:CTC 假设每个时间片的输出是条件独立的,但在OCR或者语音识别中,相邻几个时间片中往往包含着高度相关的语义信息,它们并非相互独立的,所以某些情境下 CTC 需要语言模型(LM)辅助才能达到较好效果
-
单调对齐:CTC 要求输入与输出之间的对齐是单向的,在OCR和语音识别中,这种约束是成立的。但是在一些场景中(如机器翻译),这个约束并不成立,也就是不合适标签间存在强依赖的任务
-
标签学习:CTC 在没有约束时可能会将输出对齐得非常分散、不合理,模型可能会用blank大量填充,同时 CTC 也不能很好地建模重复特征,因为这依赖于 blank 分割,如果 blank 学不好,就容易导致输出错误,同时也因为模型可能对重复符号不敏感

 浙公网安备 33010602011771号
浙公网安备 33010602011771号