
【自学嵌入式:stm32单片机】光敏传感器控制蜂鸣器
目录
光敏传感器控制蜂鸣器
接线图
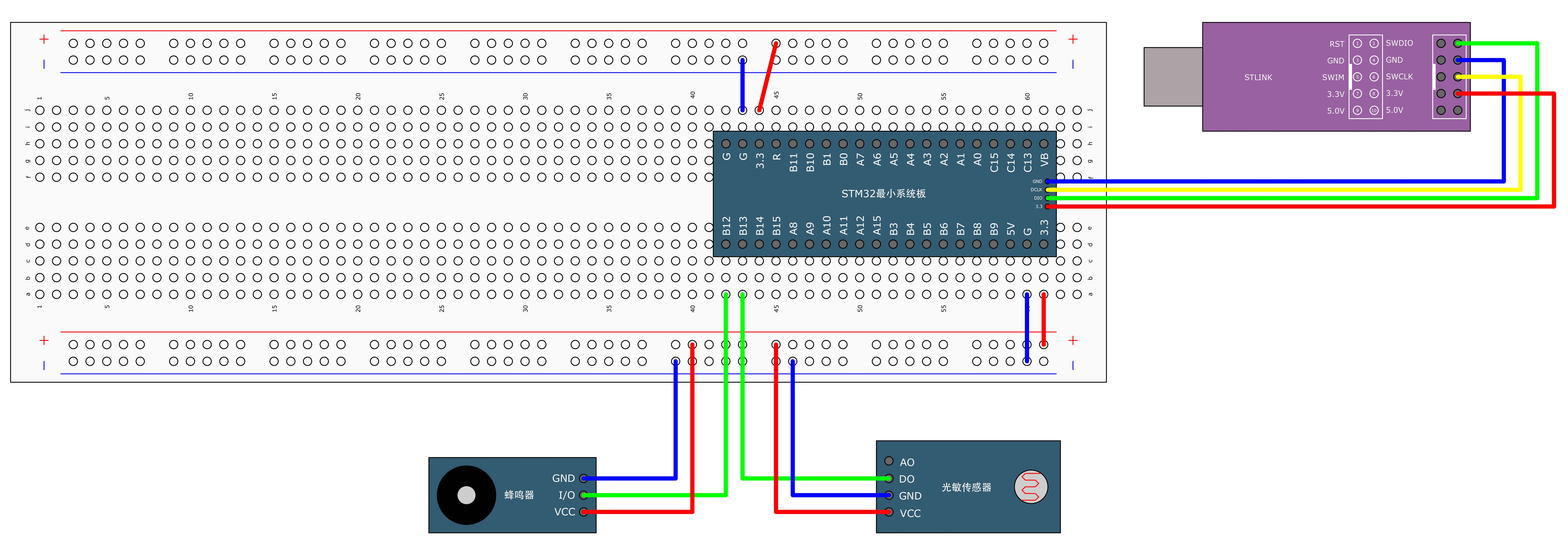
光敏传感器,遮住光线,输出指示灯灭,代表输出高电平,有光线,输出指示灯亮,代表输出低电平,光敏传感器的电位器可以调节高低电平的判断阈值,光敏传感器的IO口选择上拉模式,蜂鸣器选择推挽输出模式
实现的效果就是,遮住光敏电阻或者没光,蜂鸣器响,不遮挡光敏电阻且有光,蜂鸣器不响
标准库实现
已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32
Buzzer.h
#ifndef __BUZZER_H
#define __BUZZER_H
void Buzzer_Init(void); //初始化蜂鸣器
void Buzzer_ON(void); //蜂鸣器响
void Buzzer_OFF(void); //蜂鸣器不响
void Buzzer_Turn(void); //蜂鸣器状态取反
#endif
Buzzer.c
#include "stm32f10x.h" // Device header
//初始化蜂鸣器
void Buzzer_Init(void)
{
//打开APB2总线的GPIOB外设并开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; //B12口打开
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//蜂鸣器低电平触发,先设置高电平不让它响
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
//蜂鸣器响
void Buzzer_ON(void)
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
//蜂鸣器不响
void Buzzer_OFF(void)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
//取反蜂鸣器的状态,端口电平翻转
void Buzzer_Turn(void)
{
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_12) == 0)
{
GPIO_SetBits(GPIOB, GPIO_Pin_12);
}
else
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
}
LightSensor.h
#ifndef __LIGHTSENSOR_H
#define __LIGHTSENSOR_H
void LightSensor_Init(void); //初始化光敏传感器
uint8_t LightSensor_Get(void); //获取光敏传感器的值
#endif
LightSensor.c
#include "stm32f10x.h" // Device header
//初始化光敏传感器
void LightSensor_Init(void)
{
//打开APB2总线的GPIOB外设并开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; //B12口打开
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//不需要输出,我们读取即可
}
uint8_t LightSensor_Get(void)
{
return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);
}
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"
int main(void)
{
Buzzer_Init();
LightSensor_Init();
while(1)
{
if(LightSensor_Get() == 1)
{
Buzzer_ON(); //无光,蜂鸣器响
}
else
{
Buzzer_OFF(); //有光,蜂鸣器不响
}
}
}
HAL库实现
已开源到:https://gitee.com/qin-ruiqian/jiangkeda-stm32-hal
IDE设置
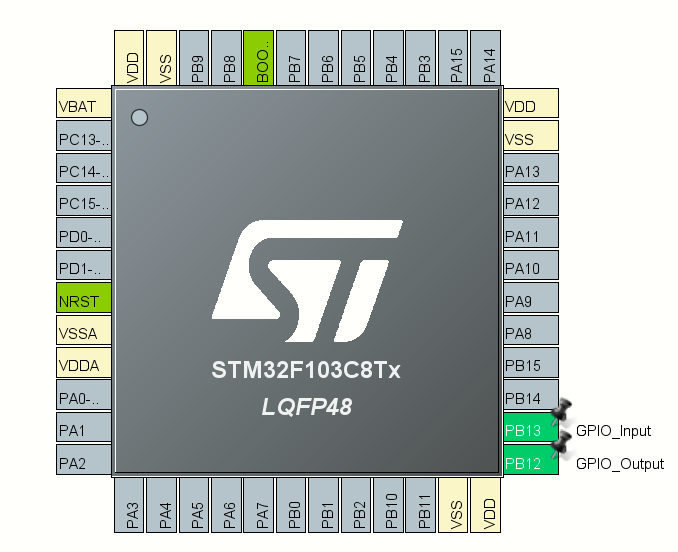
先设置连着蜂鸣器的PB12口为输出,连着光敏传感器的PB13口为输入
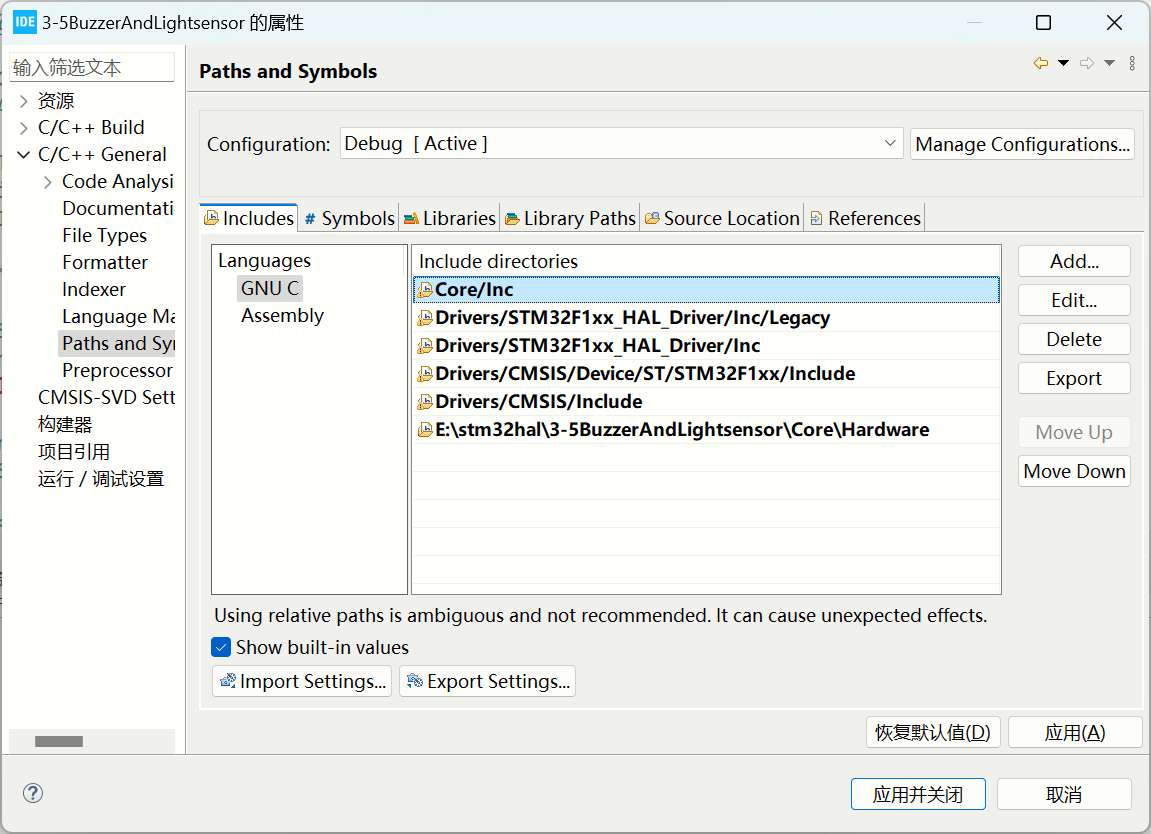
再设置蜂鸣器的PB12口是推挽输出模式,光敏电阻的PB13口是上拉模式,还是像本系列上一篇文章一样,配置一下Hardware文件夹,方便编译器识别
由于都配置好了端口,不涉及到蜂鸣器等模块的初始化问题
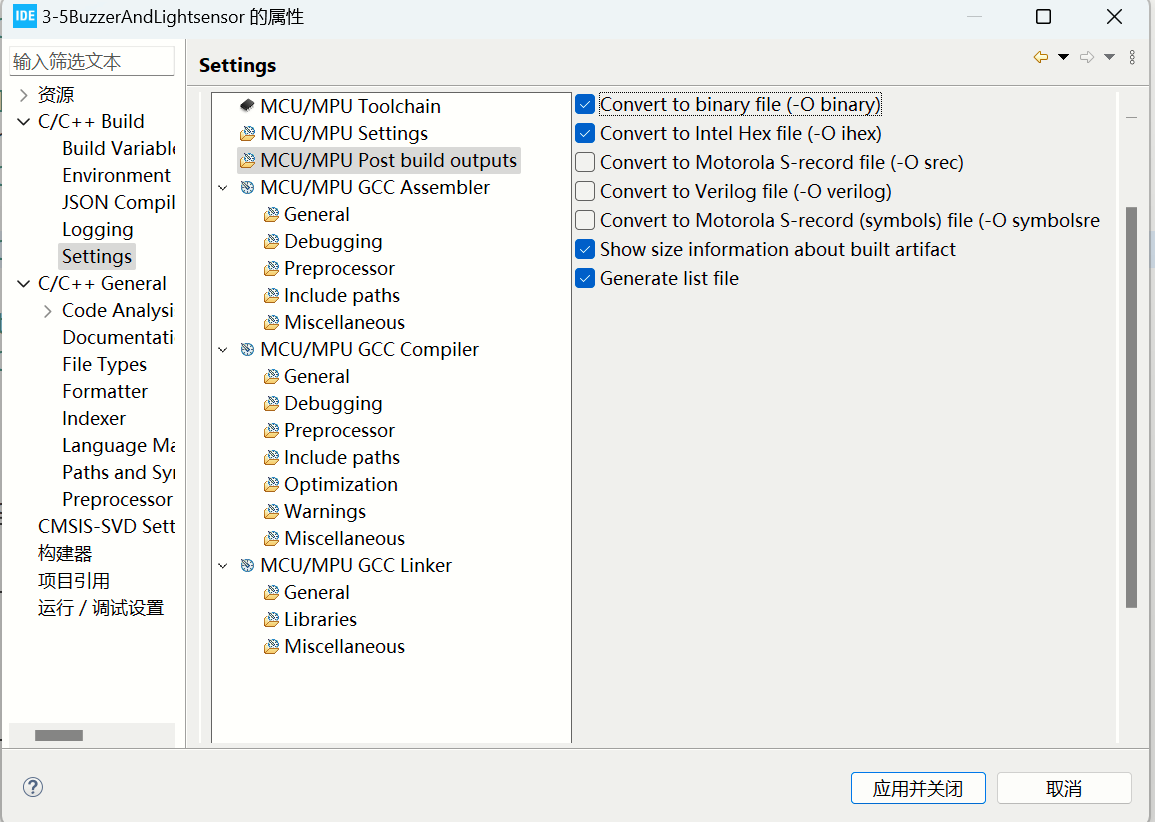
编译的时候别忘了在项目->属性里设置生成二进制和十六进制文件
Buzzer.h
/*
* Buzzer.h
*
* Created on: Aug 9, 2025
* Author: Administrator
*/
#ifndef HARDWARE_BUZZER_H_
#define HARDWARE_BUZZER_H_
void Buzzer_ON(void); //蜂鸣器响
void Buzzer_OFF(void); //蜂鸣器不响
#endif /* HARDWARE_BUZZER_H_ */
Buzzer.c
/*
* Buzzer.c
*
* Created on: Aug 9, 2025
* Author: Administrator
*/
#include "stm32f1xx_hal.h"
//蜂鸣器响
void Buzzer_ON(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_RESET);
}
//蜂鸣器不响
void Buzzer_OFF(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
}
LightSensor.h
/*
* LightSensor.h
*
* Created on: Aug 9, 2025
* Author: Administrator
*/
#ifndef HARDWARE_LIGHTSENSOR_H_
#define HARDWARE_LIGHTSENSOR_H_
uint8_t LightSensor_Get(void); //获取光敏传感器高低电平,低电平有光
#endif /* HARDWARE_LIGHTSENSOR_H_ */
LightSensor.c
/*
* LightSensor.c
*
* Created on: Aug 9, 2025
* Author: Administrator
*/
#include "stm32f1xx_hal.h"
//获取光敏传感器的电平
uint8_t LightSensor_Get(void)
{
return HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_13);
}
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "Buzzer.h"
#include "LightSensor.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//
if(LightSensor_Get() == 1)
{
Buzzer_ON(); //无光,蜂鸣器响
}
else
{
Buzzer_OFF(); //有光,蜂鸣器不响
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOB_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, GPIO_PIN_SET);
/*Configure GPIO pin : PB12 */
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PB13 */
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */

 浙公网安备 33010602011771号
浙公网安备 33010602011771号