
【深度学习数学基础:线性代数】3. 线性空间及线性映射:3.9 线性映射
3. 线性空间及线性映射
3.9 线性映射
3.9.1 线性映射基本概念
从线性空间 \(\boldsymbol{V}\) 到线性空间 \(\boldsymbol{W}\) 的映射 \(T: \boldsymbol{V} \rightarrow \boldsymbol{W}\),如果具有下列性质则称为线性映射:
- 对任意的 \(\boldsymbol{u}, \boldsymbol{v} \in \boldsymbol{V}\),有 \(T(\boldsymbol{u}+\boldsymbol{v}) = T(\boldsymbol{u}) + T(\boldsymbol{v})\);
- 对任意的 \(\boldsymbol{v} \in \boldsymbol{V}\) 及数 \(a\),有 \(T(a\boldsymbol{v}) = aT(\boldsymbol{v})\)。
从 \(\boldsymbol{V}\) 到 \(\boldsymbol{W}\) 的所有线性映射所构成的集合记为 \(\mathcal{L}(\boldsymbol{V}, \boldsymbol{W})\)。
-
零映射(\(\mathbf{0}\))
零映射是将某个向量空间的每个元素都映射为另一个向量空间的加法单位元(即 \(\boldsymbol{0}\)),它是线性映射,因为:\[\begin{align*} \mathbf{0}(\boldsymbol{u}) = \boldsymbol{0}, \ \mathbf{0}(\boldsymbol{v}) = \boldsymbol{0}, \ \mathbf{0}(\boldsymbol{u}+\boldsymbol{v}) &= \boldsymbol{0} \quad \Rightarrow \quad \mathbf{0}(\boldsymbol{u}+\boldsymbol{v}) = \mathbf{0}(\boldsymbol{u}) + \mathbf{0}(\boldsymbol{v}), \\ \mathbf{0}(a\boldsymbol{v}) = \boldsymbol{0}, \ a\mathbf{0}(\boldsymbol{v}) &= \boldsymbol{0} \quad \Rightarrow \quad \mathbf{0}(a\boldsymbol{v}) = a\mathbf{0}(\boldsymbol{v}). \end{align*} \] -
恒等映射(\(I\))
恒等映射是将向量空间中的元素映射到自身,它是线性映射,因为:\[\begin{align*} I(\boldsymbol{u}) = \boldsymbol{u}, \ I(\boldsymbol{v}) = \boldsymbol{v}, \ I(\boldsymbol{u}+\boldsymbol{v}) &= \boldsymbol{u}+\boldsymbol{v} \quad \Rightarrow \quad I(\boldsymbol{u}+\boldsymbol{v}) = I(\boldsymbol{u}) + I(\boldsymbol{v}), \\ I(a\boldsymbol{u}) = a\boldsymbol{u}, \ aI(\boldsymbol{u}) &= a\boldsymbol{u} \quad \Rightarrow \quad I(a\boldsymbol{u}) = aI(\boldsymbol{u}). \end{align*} \]
微分是一种线性映射,已知微分可记为 \(T(\boldsymbol{u}) = \boldsymbol{u}'\),并且我们知道对于微分有 \((\boldsymbol{u}+\boldsymbol{v})' = \boldsymbol{u}'+\boldsymbol{v}'\)、\((a\boldsymbol{u})' = a\boldsymbol{u}'\),所以:
积分是一种线性映射,假设 \(T(\boldsymbol{u})\) 表示积分 \(T(\boldsymbol{u}) = \int \boldsymbol{u}(x) \, \mathrm{d}x\),并且我们知道对于积分(前提是可积)有 \(\int [\boldsymbol{u}(x)+\boldsymbol{v}(x)] \, \mathrm{d}x = \int \boldsymbol{u}(x) \, \mathrm{d}x + \int \boldsymbol{v}(x) \, \mathrm{d}x\),所以:
在数学中,算子(Operator) 可以理解为“作用于向量或函数的映射”,它接受一个向量或函数作为输入,输出另一个向量或函数。例如,微分运算 \(T(\boldsymbol{u}) = \boldsymbol{u}'\) 把一个函数 \(\boldsymbol{u}(x)\) 映射为它的导函数,积分运算 \(T(\boldsymbol{u}) = \int \boldsymbol{u}(x) \, \mathrm{d}x\) 则把函数映射为另一个函数,它们都是典型的算子。
如果算子满足线性映射的性质(即 \(T(\boldsymbol{u}+\boldsymbol{v}) = T(\boldsymbol{u})+T(\boldsymbol{v})\) 和 \(T(a\boldsymbol{u})=aT(\boldsymbol{u})\)),就称为线性算子。微分和积分都是线性算子,它们在函数空间中扮演着核心角色,是连接代数与分析的重要工具。
实际上微分和积分都可以看作是算子,所以它们都是线性算子,这种视角已经十分接近于泛函,但它们不能直接称之为泛函,因为泛函是将对象映射为一个标量,例如定积分不仅是线性算子还是线性泛函。
设 \(T \in \mathcal{L}(\boldsymbol{V}, \boldsymbol{W})\),\(\boldsymbol{V}\) 中被 \(T\) 映射成 \(\boldsymbol{0}\) 的那些向量所组成的子集称为 \(T\) 的零空间(null space),记为 \(\text{null } T\):
【注】零空间是针对线性映射定义的,而不是针对某个线性空间定义的;零空间很多时候也被称为核(kernel,\(\ker(T)\)).
例:若 \(T\) 表示微分算子,则 \(\text{null } T\) 为常函数集(因为只有常函数的导数为 \(\boldsymbol{0}\))。
若 \(\boldsymbol{V}\) 和 \(\boldsymbol{W}\) 均为有限维向量空间,\(T\) 将 \(\boldsymbol{V}\) 映射到 \(\boldsymbol{W}\),则:
- 若 \(\dim \boldsymbol{V} > \dim \boldsymbol{W}\),则 \(\boldsymbol{V}\) 到 \(\boldsymbol{W}\) 的线性映射一定不是单射;
- 若 \(\dim \boldsymbol{V} < \dim \boldsymbol{W}\),则 \(\boldsymbol{V}\) 到 \(\boldsymbol{W}\) 的线性映射一定不是满射。
【补】在映射 \(T: \boldsymbol{V} \rightarrow \boldsymbol{W}\) 中:
-
单射(Injective):若不同的输入对应不同的输出,即
\[\forall \boldsymbol{v}_1 \neq \boldsymbol{v}_2 \in \boldsymbol{V}, \quad T(\boldsymbol{v}_1) \neq T(\boldsymbol{v}_2), \]则称 \(T\) 为单射(或“一对一映射”)。几何上,单射不会将不同的点“压缩”到同一个像点。
-
满射(Surjective):若 \(\boldsymbol{W}\) 中的每个元素都有原像,即
\[\forall \boldsymbol{w} \in \boldsymbol{W}, \quad \exists \boldsymbol{v} \in \boldsymbol{V} \text{ 使得 } T(\boldsymbol{v}) = \boldsymbol{w}, \]则称 \(T\) 为满射(或“映上的映射”)。几何上,满射能“覆盖”整个目标空间 \(\boldsymbol{W}\)。
-
满射(通俗理解):就像“全覆盖的投篮”——假设你有一个篮球框(代表目标空间 \(\boldsymbol{W}\)),每次投篮(映射 \(T\))相当于把一个向量从 \(\boldsymbol{V}\) 扔到 \(\boldsymbol{W}\) 里。
-
如果是满射:意味着篮球框里的每一个位置(\(\boldsymbol{W}\) 中的每个向量)都至少被一个篮球(\(\boldsymbol{V}\) 中的向量)砸中过。即 没有任何一个位置是“空的”,每个位置都能找到至少一个对应的投篮动作。
-
例子:
- 函数 \(f(x) = x+1\) 把实数 \(\mathbb{R}\) 映射到 \(\mathbb{R}\),是满射——因为不管你说哪个数 \(y\),都能找到 \(x = y-1\) 使得 \(f(x)=y\)(比如 \(y=5\) 对应 \(x=4\),\(y=-2\) 对应 \(x=-3\))。
- 但函数 \(f(x) = x^2\) 不是满射——因为负数(如 \(y=-1\))永远找不到实数 \(x\) 让 \(x^2=-1\),相当于篮球框里负数的位置永远没被砸中。
-
线性映射中的满射:若 \(T: \boldsymbol{V} \to \boldsymbol{W}\) 是满射,则 \(\boldsymbol{W}\) 里 每个向量都能被 \(\boldsymbol{V}\) 中的某个向量“映射到”,没有“遗漏”的向量。比如把三维空间 \(\mathbb{R}^3\) 映射到二维平面 \(\mathbb{R}^2\) 的投影映射(如 \(T(x,y,z)=(x,y)\))是满射——平面上每个点 \((a,b)\) 都能找到三维点 \((a,b,0)\) 映射到它。
-
结合零空间的结论:
- 若 \(\dim \boldsymbol{V} > \dim \boldsymbol{W}\),则 \(\text{null } T\) 至少包含非零向量(即 \(T\) 将多个向量映射到 \(\boldsymbol{0}\)),故 \(T\) 不可能是单射;
- 若 \(\dim \boldsymbol{V} < \dim \boldsymbol{W}\),则 \(T\) 的像空间维度 \(\leq \dim \boldsymbol{V}\),无法覆盖更高维的 \(\boldsymbol{W}\),故 \(T\) 不可能是满射。
例:微分算子 \(T(f) = f'\) 将所有常数函数映射到 \(\boldsymbol{0}\),故 \(\text{null } T\) 非零,\(T\) 不是单射。
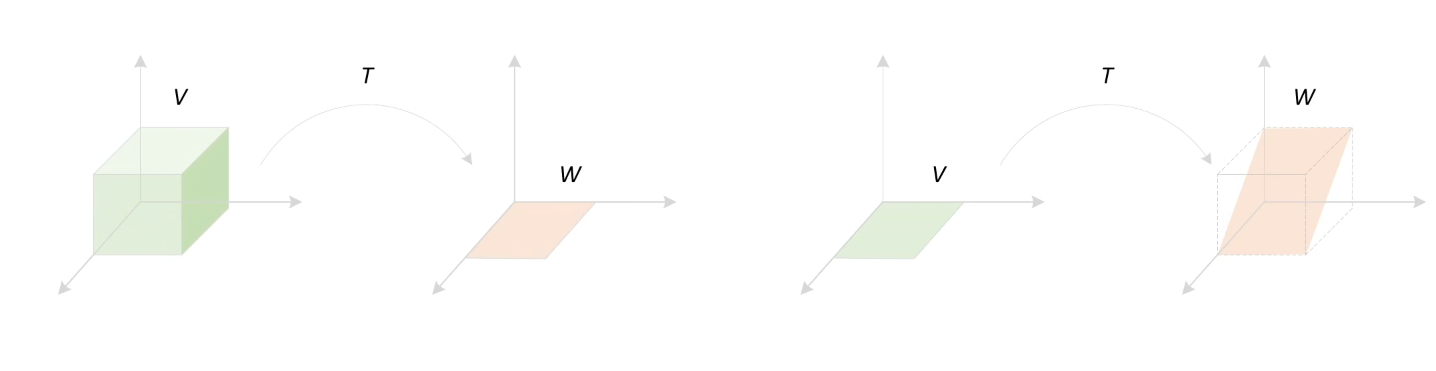
从这个图就能看到单射与满射的几何直观解释:
-
核心概念回顾
设线性映射 \(T: \boldsymbol{V} \to \boldsymbol{W}\):- 单射:若 \(T(\boldsymbol{x}) = T(\boldsymbol{y}) \implies \boldsymbol{x} = \boldsymbol{y}\)(不同向量原像映射到不同像,无“塌陷”)。
- 满射:若 \(\text{im}(T) = \boldsymbol{W}\)(像空间覆盖整个目标空间 \(\boldsymbol{W}\),无“遗漏”)。
- 秩-零化度定理:\(\dim \boldsymbol{V} = \dim(\ker T) + \dim(\text{im}(T))\),其中 \(\ker T\) 是核(映射到零向量的原像集合),\(\text{im}(T)\) 是像空间(所有像的集合)。
-
左图分析(\(\boldsymbol{V}\) 是三维空间,\(\boldsymbol{W}\) 是二维空间)
- 满射判断:
像空间 \(\text{im}(T)\) 填满 \(\boldsymbol{W}\) 的二维平面(粉色覆盖整个 \(\boldsymbol{W}\)),故 \(\dim(\text{im}(T)) = \dim \boldsymbol{W} = 2\),满足 满射(像空间等于目标空间 \(\boldsymbol{W}\))。 - 单射判断:
由秩-零化度,\(\dim(\ker T) = \dim \boldsymbol{V} - \dim(\text{im}(T)) = 3 - 2 = 1 \neq 0\),即核非零(存在非零向量映射到 \(\boldsymbol{W}\) 的零向量),故 不是单射(有“塌陷”,不同向量原像可能映射到同一像)。
- 满射判断:
-
右图分析(\(\boldsymbol{V}\) 是二维空间,\(\boldsymbol{W}\) 是三维空间)
- 单射判断:
像空间 \(\text{im}(T)\) 是 \(\boldsymbol{W}\) 内的二维平面(粉色未填满 \(\boldsymbol{W}\),但维度与 \(\boldsymbol{V}\) 相同,\(\dim(\text{im}(T)) = \dim \boldsymbol{V} = 2\))。
由秩-零化度,\(\dim(\ker T) = 2 - 2 = 0\),即核仅含零向量,满足 单射(无“塌陷”,不同向量原像必映射到不同像)。 - 满射判断:
\(\dim(\text{im}(T)) = 2 < \dim \boldsymbol{W} = 3\),像空间只是 \(\boldsymbol{W}\) 的子空间(未覆盖整个 \(\boldsymbol{W}\)),故 不是满射(有“遗漏”,\(\boldsymbol{W}\) 中存在元素无原像)。
- 单射判断:
-
直观总结
- 单射(右图):像空间是目标空间 \(\boldsymbol{W}\) 的“嵌入子空间”,维度与原空间 \(\boldsymbol{V}\) 相同,无塌陷(核为零),但未覆盖 \(\boldsymbol{W}\)。
- 满射(左图):像空间覆盖整个目标空间 \(\boldsymbol{W}\),维度与 \(\boldsymbol{W}\) 相同,但因原空间 \(\boldsymbol{V}\) 维度更高,必然有塌陷(核非零),不同向量原像可能映射到同一像。
- 核心差异:单射看 是否塌陷(核是否为零),满射看 是否覆盖(像空间是否等于 \(\boldsymbol{W}\)),通过 维度关系 关联。
3.9.2 同构
一个线性映射是可逆的当且仅当它既是单射又是满射;两个向量空间是同构的(isomorphic),如果存在从一个空间到另一个空间的可逆线性映射;两个有限维向量空间同构当且仅当它们的维数相等。
【注】
- 什么是“既是单射又是满射”?(双射的通俗解释)
- 先回顾单射和满射的核心
- 单射(一对一):不同的输入绝不会得到相同的输出
✅ 例子:每个学生有唯一的学号(不同学生学号不同)
❌ 反例:不同学生共用一个学号(如学号重复)- 满射(全覆盖):每个输出都有对应的输入
✅ 例子:班级里每个学号都分配给了具体学生(没有空学号)
❌ 反例:学号007没人用(存在空学号)
- 双射:同时满足单射和满射的“完美映射”
定义:一个映射既是单射又是满射,称为双射(Bijective),也叫“一一对应”。
通俗理解:就像“完美的钥匙开锁”——
- 单射性:一把钥匙只能开一把锁(不同钥匙不开同一把锁)
- 满射性:每把锁都有对应的钥匙(没有锁被遗漏)
- 生活中的双射例子
例子1:班级座位分配
- 输入:学生集合
- 输出:座位集合
- 双射条件:
① 单射:每个学生坐不同座位(不挤同一座位)
② 满射:每个座位都有学生(没有空座位)
此时,学生和座位形成一一对应,是双射。
例子2:函数 f(x) = x + 1(实数→实数)- 单射验证:若 x₁ ≠ x₂,则 x₁+1 ≠ x₂+1(不同输入输出不同)
- 满射验证:对任意实数 y,存在 x = y-1 使得 f(x) = y(每个数都能被映射到)
- 结论:f(x) 是双射。
反例:函数 f(x) = x²(实数→实数)- 非单射:x=2和x=-2都映射到4(不同输入同输出)
- 非满射:负数(如y=-1)没有原像(实数平方非负) >
- 结论:不是双射。
- 双射的核心作用:建立“一一对应”
双射就像在两个集合之间架起一座“双向桥梁”:
- 每个元素在对岸都有唯一的“伙伴”
- 没有元素被落下或重复配对
这种映射在数学中用于证明两个集合“本质相同”(如有限维向量空间同构当且仅当维数相同,就是通过双射线性映射建立联系)。
子与不变子空间
- 算子:一个向量空间到其自身的线性映射称为算子(operator),记作 \(T: \boldsymbol{V} \rightarrow \boldsymbol{V}\),其中 \(\boldsymbol{V}\) 是向量空间。
- 用 \(\mathcal{L}(\boldsymbol{V})\) 表示 \(\boldsymbol{V}\) 上算子的集合,即 \(\mathcal{L}(\boldsymbol{V}) = \mathcal{L}(\boldsymbol{V}, \boldsymbol{V})\)。
- 若对于 \(\boldsymbol{V}\) 的子空间 \(\boldsymbol{U}\),当 \(\boldsymbol{u} \in \boldsymbol{U}\) 时总有 \(T(\boldsymbol{u}) \in \boldsymbol{U}\),则称 \(\boldsymbol{V}\) 的子空间 \(\boldsymbol{U}\) 在 \(T\) 下不变。
限维空间中线性映射的等价性质
对于有限维向量空间 \(\boldsymbol{V}\) 到自身的线性映射 \(T\),下列性质等价:
(a)\(T\) 是可逆的;
(b)\(T\) 是单射;
(c)\(T\) 是满射。
3.9.3 矩阵表示
设 \(T\) 是线性空间 \(\boldsymbol{V}\) 的一个线性变换,\(\left(\boldsymbol{\alpha}_{1}, \boldsymbol{\alpha}_{2}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 为 \(\boldsymbol{V}\) 的一组基,如果这组基在 \(T\) 的变换下的像可表示为:
那么上式可表示为 \(T\left(\boldsymbol{\alpha}_{1}, \boldsymbol{\alpha}_{2}, \cdots, \boldsymbol{\alpha}_{n}\right) = \left(\boldsymbol{\alpha}_{1}, \boldsymbol{\alpha}_{2}, \cdots, \boldsymbol{\alpha}_{n}\right) \boldsymbol{A}\),其中
\(\boldsymbol{A}\) 称为线性变换 \(T\) 在基 \(\left(\boldsymbol{\alpha}_{1}, \boldsymbol{\alpha}_{2}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 下的矩阵。在给定了基之后,矩阵 \(\boldsymbol{A}\) 是由线性变换 \(T\) 唯一确定的。
【注】总结一句话:一个线性变换就对应一个矩阵
3.9.4 基变换
假设线性空间 \(\boldsymbol{V}\) 有两组基 \(\left(\boldsymbol{\alpha}_{1}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 和 \(\left(\boldsymbol{\beta}_{1}, \cdots, \boldsymbol{\beta}_{n}\right)\),这两组基可互相转换。将 \(\boldsymbol{\beta}_{i}\) 视为 \(\boldsymbol{V}\) 中的向量,可由 \(\left(\boldsymbol{\alpha}_{1}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 的线性组合表示,因此有:
等式两边取转置后可得:
其中 \(\boldsymbol{P}\) 称为由基 \(\left(\boldsymbol{\alpha}_{1}, \boldsymbol{\alpha}_{2}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 到 \(\left(\boldsymbol{\beta}_{1}, \boldsymbol{\beta}_{2}, \cdots, \boldsymbol{\beta}_{n}\right)\) 的过渡矩阵。由于两组基均线性无关,故 \(\boldsymbol{P}\) 一定是可逆的。
3.9.5 坐标变换
设线性空间 \(\boldsymbol{V}\) 中的元素 \(\boldsymbol{a}\) 在基 \(\left(\boldsymbol{\alpha}_{1}, \cdots, \boldsymbol{\alpha}_{n}\right)\) 下的坐标为 \(\left(x_{1}, x_{2}, \cdots, x_{n}\right)^{T}\),在基 \(\left(\boldsymbol{\beta}_{1}, \cdots, \boldsymbol{\beta}_{n}\right)\) 下的坐标为 \(\left(x_{1}^{\prime}, x_{2}^{\prime}, \cdots, x_{n}^{\prime}\right)^{T}\)。若两个基的过渡矩阵为 \(\boldsymbol{P}\),则有:
-
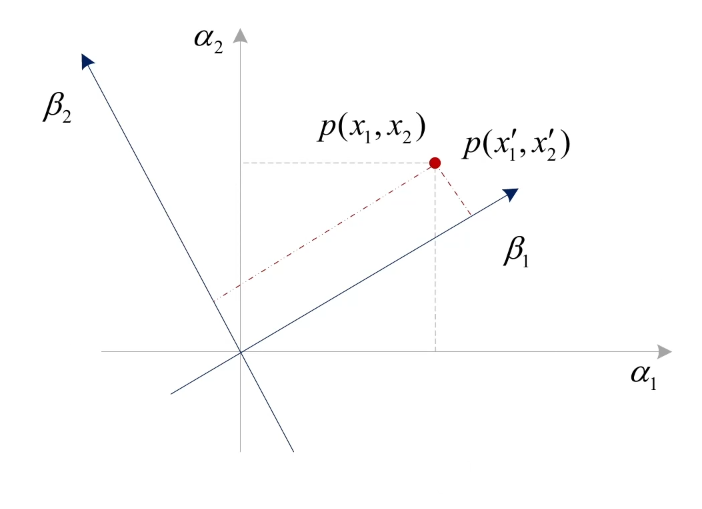
坐标变换的通俗解释(结合图示)
-
- 先理解“基”:坐标系的“方向尺子”
- 图里的 \(\boldsymbol{\alpha}_1\)、\(\boldsymbol{\alpha}_2\) 是一组 基(比如直角坐标系的x轴、y轴)。
- \(\boldsymbol{\beta}_1\)、\(\boldsymbol{\beta}_2\) 是另一组 基(比如斜坐标系的两个轴)。
- 基的作用:给空间定“方向”,像尺子的刻度方向,用来测量点的位置。
-
- 坐标:沿基方向“数格子”
- 点 \(p\) 在 \(\boldsymbol{\alpha}\) 基下的坐标是 \((x_1, x_2)\):
意思是 “从原点出发,沿 \(\boldsymbol{\alpha}_1\) 走 \(x_1\) 格,再沿 \(\boldsymbol{\alpha}_2\) 走 \(x_2\) 格,到达 \(p\)”。 - 点 \(p\) 在 \(\boldsymbol{\beta}\) 基下的坐标是 \((x_1', x_2')\):
意思是 “从原点出发,沿 \(\boldsymbol{\beta}_1\) 走 \(x_1'\) 格,再沿 \(\boldsymbol{\beta}_2\) 走 \(x_2'\) 格,也到达 \(p\)”。
-
- 过渡矩阵:基之间的“转换规则”
- 两组基 \(\boldsymbol{\alpha}\) 和 \(\boldsymbol{\beta}\) 不是随便画的——\(\boldsymbol{\beta}_1\)、\(\boldsymbol{\beta}_2\) 可以用 \(\boldsymbol{\alpha}_1\)、\(\boldsymbol{\alpha}_2\) 表示(比如 \(\boldsymbol{\beta}_1 = p_{11}\boldsymbol{\alpha}_1 + p_{21}\boldsymbol{\alpha}_2\),\(\boldsymbol{\beta}_2 = p_{12}\boldsymbol{\alpha}_1 + p_{22}\boldsymbol{\alpha}_2\))。
- 这些系数 \(p_{ij}\) 组成的矩阵 \(\boldsymbol{P}\),就是 过渡矩阵,它描述了 \(\boldsymbol{\beta}\) 基相对于 \(\boldsymbol{\alpha}\) 基的“倾斜方式”。
-
- 坐标变换公式:不同尺子的“换算关系”
- 因为基变了,坐标也要跟着变,换算规则由 \(\boldsymbol{P}\) 决定:
- 若已知 \(\boldsymbol{\beta}\) 基下的坐标 \((x_1', x_2')\),想求 \(\boldsymbol{\alpha}\) 基下的坐标 \((x_1, x_2)\),则:\[\begin{pmatrix} x_1 \\ x_2 \end{pmatrix} = \boldsymbol{P} \begin{pmatrix} x_1' \\ x_2' \end{pmatrix} \](通俗理解:\(\boldsymbol{\beta}\) 基的“格子”和 \(\boldsymbol{\alpha}\) 基的“格子”大小/方向不同,\(\boldsymbol{P}\) 帮我们把 \(\boldsymbol{\beta}\) 的格子“换算”成 \(\boldsymbol{\alpha}\) 的格子。)
- 反过来,若已知 \(\boldsymbol{\alpha}\) 基下的坐标,求 \(\boldsymbol{\beta}\) 基下的坐标,则用 \(\boldsymbol{P}\) 的逆矩阵 \(\boldsymbol{P}^{-1}\):\[\begin{pmatrix} x_1' \\ x_2' \end{pmatrix} = \boldsymbol{P}^{-1} \begin{pmatrix} x_1 \\ x_2 \end{pmatrix} \]
- 若已知 \(\boldsymbol{\beta}\) 基下的坐标 \((x_1', x_2')\),想求 \(\boldsymbol{\alpha}\) 基下的坐标 \((x_1, x_2)\),则:
-
- 图的直观对应
- 虚线的意义:点 \(p\) 向 \(\boldsymbol{\alpha}_1\)、\(\boldsymbol{\alpha}_2\) 作垂线,垂足对应的数就是 \((x_1, x_2)\);向 \(\boldsymbol{\beta}_1\)、\(\boldsymbol{\beta}_2\) 作垂线,垂足对应的数就是 \((x_1', x_2')\)。
- 为什么坐标不同?因为 \(\boldsymbol{\beta}_1\)、\(\boldsymbol{\beta}_2\) 是“斜的”,同一位置 \(p\) 在两组基下的垂足位置不同,坐标自然不同——而 \(\boldsymbol{P}\) 精确量化了这种差异!
-
-
简单总结:
基是“坐标轴的方向”,坐标是“沿方向走的步数”。换基就像换了一套尺子,过渡矩阵 \(\boldsymbol{P}\) 是“尺子换算表”,帮我们把不同尺子的“步数”(坐标)互相转换~
3.9.6 图像放缩
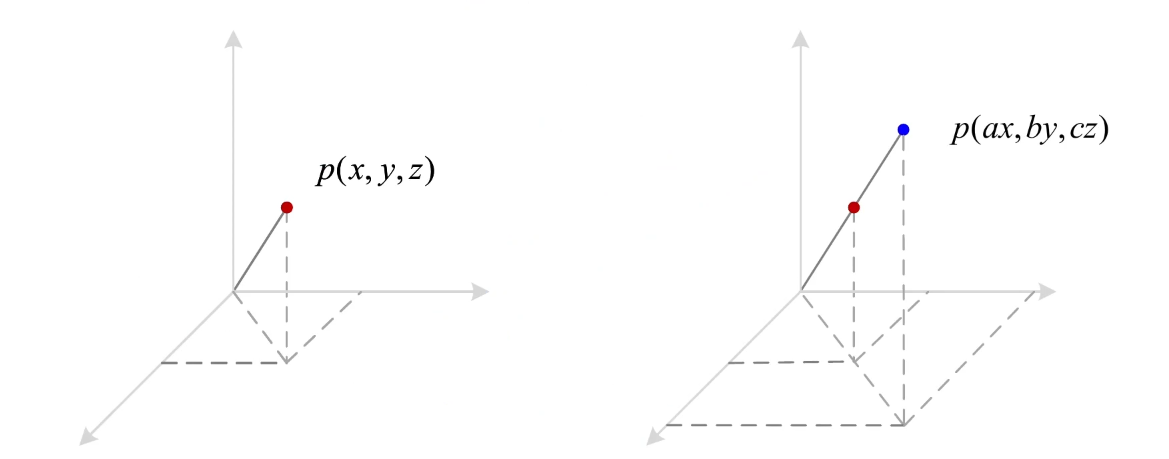
利用矩阵乘法可以实现对几何图像的缩放、平移、旋转。其中缩放、旋转是线性映射,平移不是线性映射。假设考虑对象是三维空间中的一条线段 \(\boldsymbol{p}(x, y, z)\)(\(\boldsymbol{p}\) 可视为三维线性空间中的向量)。
将线段 \(\boldsymbol{p}(x, y, z)\) 缩放为 \(\boldsymbol{p}(ax, by, cz)\)(\(a=b=c\) 是均匀缩放的特殊情况),只需让坐标与缩放矩阵相乘即可:
(注:这里用齐次坐标 \((x, y, z, 1)^\mathrm{T}\) 表示三维点,使矩阵乘法能统一处理平移等变换;缩放矩阵的对角线元素 \(a,b,c\) 控制各轴缩放比例。)
【注】这部分通常在计算机图形学中介绍,常见的图形变换中还有一个剪切;因为线性空间中的线性映射要求映射具有加法和数乘的封闭性,平移不一定具有;平移其实是仿射变换的一种
【补】增广矩阵:
- 什么是增广矩阵?(从方程组到几何变换的通俗理解)
-
- 线性方程组里的“扩展矩阵”
当解线性方程组时,比如:
\[\begin{cases} 2x + 3y = 8 \\ x - y = 1 \end{cases} \]- 系数矩阵 \(\boldsymbol{A}\):仅包含未知数的系数,即\[\boldsymbol{A} = \begin{pmatrix} 2 & 3 \\ 1 & -1 \end{pmatrix} \]
- 常数向量 \(\boldsymbol{b}\):等号右边的常数,即\[\boldsymbol{b} = \begin{pmatrix} 8 \\ 1 \end{pmatrix} \]
- 增广矩阵:把 \(\boldsymbol{b}\) 拼到 \(\boldsymbol{A}\) 的右侧,形成新矩阵:\[(\boldsymbol{A} \mid \boldsymbol{b}) = \begin{pmatrix} 2 & 3 & 8 \\ 1 & -1 & 1 \end{pmatrix} \]
简单说:增广矩阵是“系数 + 常数”的合并,把方程组的信息浓缩成一个矩阵。
-
- 几何变换里的“维度扩展”(结合齐次坐标)
在几何变换中(如三维点的平移/缩放),我们用 齐次坐标(给点加“尾巴1”,如 \((x,y,z,1)\)),这其实是另一种“增广”!
- 缩放变换(线性变换):用 4×4 增广矩阵处理齐次坐标,实现“坐标缩放”:\[\boldsymbol{\begin{pmatrix} a & 0 & 0 & 0 \\ 0 & b & 0 & 0 \\ 0 & 0 & c & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}} \boldsymbol{\begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix}} = \boldsymbol{\begin{pmatrix} ax \\ by \\ cz \\ 1 \end{pmatrix}} \]
- 平移变换(仿射变换,非线性):同样用 4×4 增广矩阵,把平移量 \((a,b,c)\) 放到最后一列,让矩阵乘法实现“坐标平移”:\[\boldsymbol{\begin{pmatrix} 1 & 0 & 0 & a \\ 0 & 1 & 0 & b \\ 0 & 0 & 1 & c \\ 0 & 0 & 0 & 1 \end{pmatrix}} \boldsymbol{\begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix}} = \boldsymbol{\begin{pmatrix} x+a \\ y+b \\ z+c \\ 1 \end{pmatrix}} \]
这里的增广矩阵,是 给三维变换“扩展维度”,让平移也能通过矩阵乘法实现(否则平移无法用普通线性变换表示)。
-
- 增广矩阵的核心意义
- 统一运算:线性变换(缩放、旋转)和仿射变换(平移),都能通过 “增广矩阵 × 齐次坐标” 统一计算,无需分开处理加法和乘法。
- 判断解的存在性(对线性方程组):比较 系数矩阵的秩 和 增广矩阵的秩,可判断方程组是否有解:
- 若 \(\boldsymbol{\text{秩}(A) \neq \text{秩}(A \mid b)}\):方程组 无解(如矛盾方程 \(x=1\) 且 \(x=2\));
- 若 \(\boldsymbol{\text{秩}(A) = \text{秩}(A \mid b)}\):方程组 有解(唯一解或无穷解)。
-
- 总结:增广矩阵是“扩展的工具”
增广矩阵的本质是 “给矩阵添加额外信息”:
- 对线性方程组,添加的是“常数项”;
- 对几何变换,添加的是“维度”(让平移能用矩阵乘法实现)。
它让复杂运算(解方程组、几何变换)更紧凑、更易计算,是线性代数里的实用技巧!
-
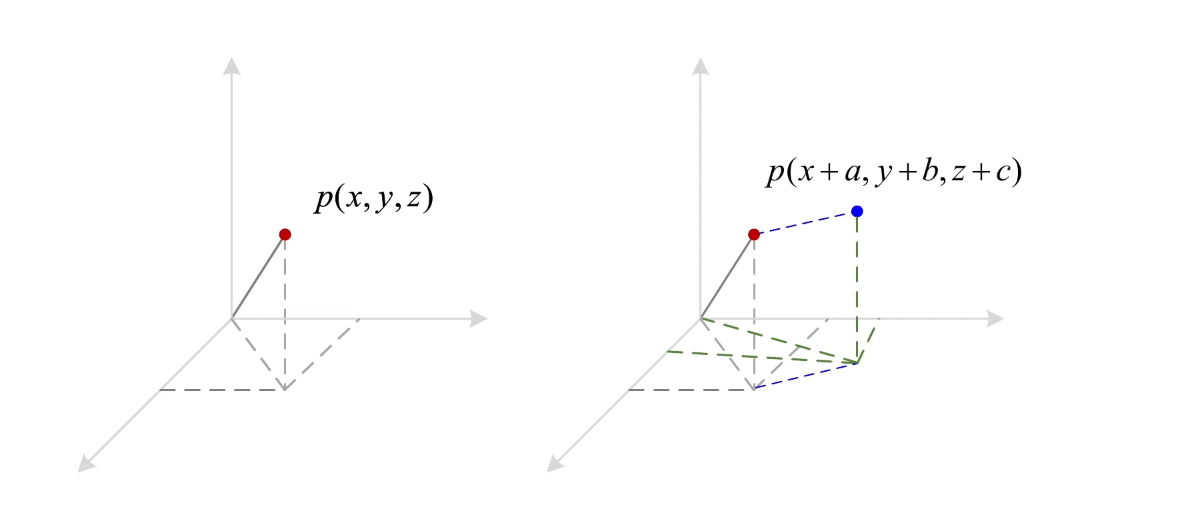
3.9.7 图像平移
将线段 \(\boldsymbol{p}(x, y, z)\) 平移为 \(\boldsymbol{p}(x+a, y+b, z+c)\),只需要与平移矩阵相乘即可。注意:虽然矩阵乘法对应线性变换,但此处对坐标 \(\boldsymbol{(x, y, z)}\) 做了齐次坐标增广(补充最后一维固定为 \(\boldsymbol{1}\)),因此平移本质上不是线性变换(线性变换要求原点不变,而平移会移动原点)。
【注】虽然前面的缩放及后面的旋转变换矩阵都是四维增广阵,但它们其实可以写成三维的
3.9.8 图像旋转
将线段 \(\boldsymbol{p}(x, y, z)\) 旋转到 \(\boldsymbol{p}(x', y', z)\) 的情况略微复杂一点。假设现在讨论的是绕 \(z\) 轴旋转,即只有 \(x, y\) 发生变化,\(z\) 取值不变。假设旋转前线段跟 \(x\) 轴的夹角为 \(a\),旋转幅度为 \(b\),即旋转后与 \(x\) 轴夹角为 \(a+b\)。
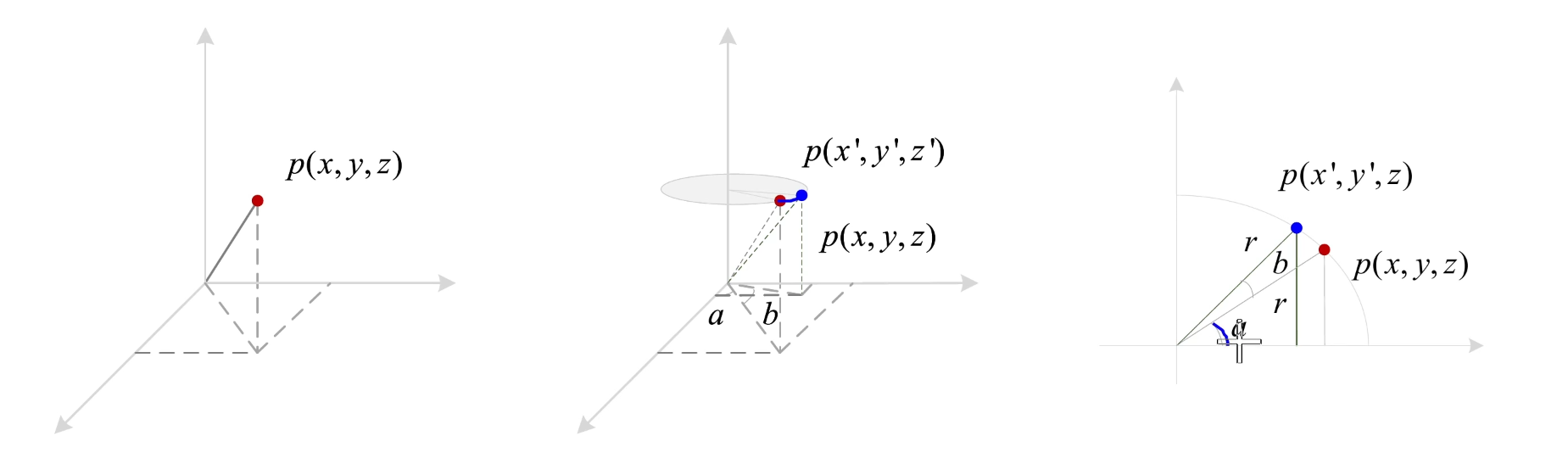
旋转前 \(\boldsymbol{(x, y)}\) 和旋转后 \(\boldsymbol{(x', y')}\) 可表示为:
根据三角函数和差公式有:
所以:
假设将图形绕 \(z\) 轴旋转 \(\theta\),其变换矩阵为:
类似地,绕 \(x\) 轴和绕 \(y\) 轴旋转的矩阵分别为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号