人工智能基础笔记 · Part B 人工神经网络
C3 人工神经网络
ANN,Artificial Neural Networks。属于连接主义的范畴。
本质上是在形成图。有/无环、有/无向图。
从 1943 年的模型出发
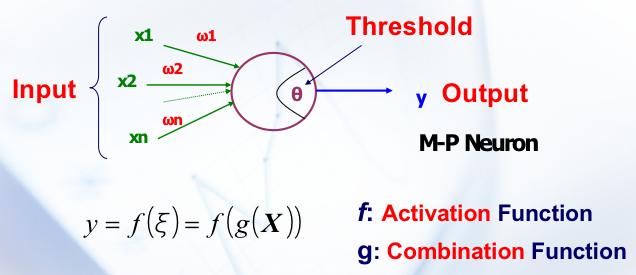
接受输入 \(X\),给出输出 \(y\)。通过 \(g(X)\) 对 \(x_1,x_2,x_3\) 来组合,看组合结果的是否超过一个阈值,返回一个 \(y=f(g(X))\) ,这个 \(f\) 就可以看做是在和阈值作比较并决定最后输出什么。
\(g\) 的选择
- Weighted Sum
- Radial Distance
\(f\) 的选择
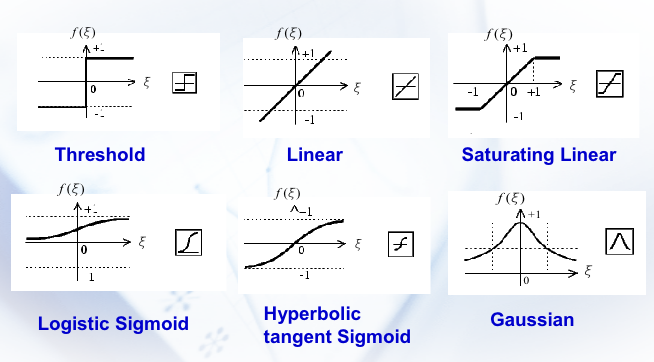
一些比较厉害的激活函数 \(f\)。
现在面临的问题有两个:
-
如何连接各个单元?
-
如何自动调整 ANN 中边的权值甚至是结构?
神经网络
接下来是把神经元连起来的工作。
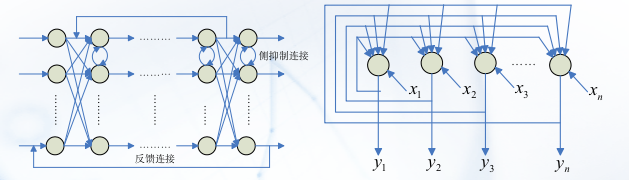
前向神经网络 Feedforward networks

反馈神经网络 Feedforward networks
神经网络的训练,就是神经网络的自由参数(例如权重和偏差)通过与其所处环境相互作用而得到调整的过程。
不同的学习策略
错误修正 Error Correction
监督学习。通常的表达是 \(\omega \leftarrow \omega+\Delta \omega=\omega+\eta \delta\) 。
赫布学习 Hebbian Learning
无监督学习。基本的思想是 “在神经网络中,如果一个神经元的活动频率与另一个神经元的活动频率高度相关,那么它们之间的连接强度应该增加”。
\(\omega_{i j}(t+1)=\omega_{i j}(t)+\eta\left(x_i(t) \cdot x_j(t)\right)\)
竞争学习 Competitive Learning
无监督学习。赢者通吃的思想。Winner-take-all, WTA。在这种机制中,网络中的神经元相互竞争以对输入信号做出响应,最终只有一个或少数几个神经元被激活。这种方法主要用于模式识别和决策制定过程。换言之:发掘特征。
- 硬竞争(Hard competition)
对于给定的输入,只有一个神经元被激活。这意味着网络作出了一个非常明确的选择,只有一个“赢家”。这是一种更为严格和排他性的响应模式。
- 软竞争(Soft competition)
软竞争允许除了最强信号的神经元外,其邻近的神经元也部分激活。这种方法提供了更多的灵活性和鲁棒性,因为它允许网络识别和响应类似但不完全相同的模式。
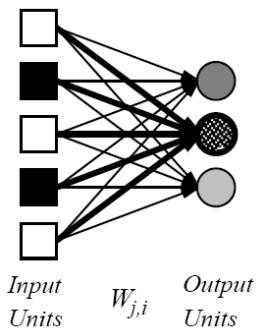
多层感知机 MLP
单层感知机 (1957)
大概长这样:
可以通过简单的方式来调整参数:
其中用到了预期输出和真实输出的差值。
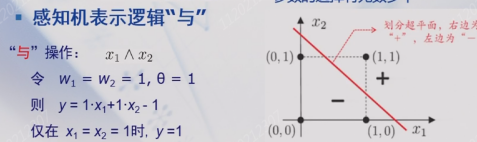
一个比较有意思的点是,单层感知机可以表达与运算、或运算和非运算,但不能表达异或运算(线性不可分)。
- 与运算
- 或运算

- 非运算

事实上,3 layers 即可以表示 All continuous functions,4 layers 就可以表示 all functions。
深度学习
Deep architectures are composed of multiple levels (usually >3) of non-linear operations, such as neural nets with many hidden layers.
层数越高,抽象程度越高。某些功能无法通过太浅的架构有效地表示(就可调元素的数量而言),深层架构也许能够表示一些原本无法有效表示的功能。
发展缓慢的原因:
-
梯度扩散,传递到底层时影响很少了。
-
缺少带标签的数据,也即缺少数据集。
深度神经网络主要采取这样的思路:
–Sigmoid nonlinearity for hidden layers.
–Softmax for the output layer.
B-P Network
Back-Propagation (B-P) Algorithm and Network。一种结构上最简单的有趣 MLP。具体的算法如下:
-
输入数据从输入层传递到隐藏层,然后传递到输出层(前向传播)。
-
错误信息从外层向后传播到隐藏层,然后传播到输入层(反向传播)。
具体而言, \(\bold w\cdot \bold x + b = \sigma_j'\) ,经过激活函数变成了隐藏层保留的值 \(y_j'\),接着 \(y_j'\) 隐藏层再经过一次线性组合得到 \(\sigma _i\),经过激活函数变成了输出 \(y_i\)。所以过程是线性组合 \(\to\) 激活函数 \(\to\) 线性组合 \(\to\) 激活函数。也即,通常在隐藏层和输出层的线性组合之后都会有激活函数的步骤。
简单步骤
-
从训练集中选择一个模式并将其呈现给网络。
-
计算该序列中输入、隐藏和输出神经元的激活值(每个节点的输出)。
-
通过将生成的输出与所需的输出进行比较来计算输出神经元的误差。
-
使用计算出的误差来更新网络中的所有权重,从而减少全局误差测量。
-
重复步骤 1 到步骤 4,直到全局误差低于预定义的阈值。
误差的衡量。采用平方损失(Mean Squared Error,MSE)。

进而可以使用梯度下降法调整参数:
右侧连边 \(\omega_{j i}\)
那么对于隐藏层和输出层 \(Y\):
计算过程如下:
这个地方的激活函数选择了 sigmoid 作为激活函数的原因是它导数的形态很合理,且范围合理:
左侧连边 \(\omega_{kj}\)
总之就是算来算去,可以得到最终的形式如下:
深度信念网络 DBNs
Deep Belief Networks。这块真看不懂。所以只能大概理解一下结构了:
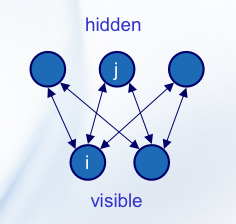
受限玻尔兹曼机 RBM
Restricted Boltzmann Machines,一个两层结构的网络。RBM 是一种无监督的能量基模型,其核心思想是通过一个能量函数来定义网络的状态。
-
可见层(Visible Layer):代表观察到的数据,可以是任何类型的输入数据,比如图片的像素值、文本的词向量等。
-
隐藏层(Hidden Layer):代表数据的特征,这些特征是模型通过学习数据分布自动捕捉到的。
RBM 的特点在于其层内的节点不相互连接,只有可见层与隐藏层之间存在连接,这些连接是双向的并且权重是对称的。这种结构限制了网络的复杂性,同时使得训练算法(如对比散度,Contrastive Divergence, CD)能够有效地更新权重。
RBM 中的每一个状态(即可见层和隐藏层的神经元配置)都有一个定义好的能量,该能量由网络的权重和偏置确定,对于给定的可见单元的状态 $\mathbf{v} $ 和隐藏单元的状态 $\mathbf{h} $,RBM的能量函数 $E $ 定义为:
其中:
- $a_i $ 是可见单元 $v_i $ 的偏置。
- $b_j $ 是隐藏单元 $h_j $ 的偏置。
- $w_{ij} $ 是可见单元 $i $ 和隐藏单元 $j $ 之间的权重。
那么 RBM 中可见单元和隐藏单元的联合概率分布由下面的玻尔兹曼分布给出:
这里 $Z $ 是配分函数(归一化常数),定义为所有可能状态的能量的指数和的总和。但这个通常没法算。
真正需要的是可见单元的边缘概率分布,但实际应用中直接计算边缘分布不可行,因此通常使用一些近似方法,如对比散度(Contrastive Divergence, CD)算法,来近似地学习模型参数。通过这样的训练过程,RBM 能够学习到一个近似的数据分布,使得通过该分布生成的数据和真实数据尽可能相似。
DBNs 结构
DBNs 的结构可以如此刻画:显层(输入层)\(\to\) 隐层 \(\to\) 隐层 \(...~ \to\) 隐层 \(\to\) 输出层。其中,中间的层均为 RBM,最后一个隐层和输出层之间是 BP。因此,DBNs 可以认为是由多层受限玻尔兹曼机堆叠而成,每一层都对上一层的表示进行进一步抽象。采用无监督预训练,逐层构建复杂模型。

算法步骤如下:
-
前向传播: 从可见层到隐藏层的激活。
-
后向传播: 从隐藏层到可见层的重构。
-
梯度计算: 通过对比散度( Contrastive Divergence,CD ) 计算权重更新的梯度。
-
权重更新: 通过学习率更新权重。
其训练过程可以分为两个阶段:
-
预训练阶段: 每个 RBM 层按照从底到顶的顺序进行贪心逐层训练。
-
微调阶段(fine-tuning): 使用监督学习方法( 如反向传播)对整个网络进行微调。
RBM 层能贪心的原因是,我们可以通过无监督学习使得 RBM 的能量值来到最小,此时每个 RBM 层可以独立地学习到一个对输入数据有效的表示。那之后微调自然是和 B-P 一样的思路,要选择一个最佳的表示。
AutoEncoder
一种前馈神经网络结构,由编码器(encoder)和解码器(decoder)组成,用于学习输入数据的紧凑表示。往往通过监督学习或无监督学习进行训练,目标是最小化输入和重构输出之间的差异。主要用于数据压缩、去噪、特征学习等任务。
为啥这块知识会出现在这里,我毫无头绪。
Hopfield Neural Network 霍普菲尔德网络
基本逻辑
1982。属于 Feedback Networks,也叫做 Recurrent Neural Network,循环神经网络。对于循环神经网络,通常追求其能达到某个稳定的状态,即 \(Y(t) = Y(t + 1)\) 。
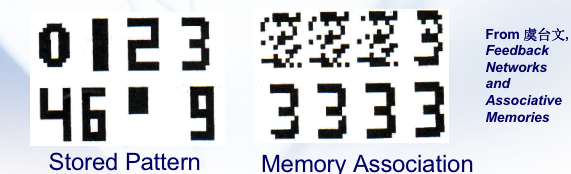
冥思苦想半天终于明白是怎么个事儿了。HNN 的意思是,一开始给出了 \(K\) 组输入/训练集作为初始模式/吸引子,通过这些输入获得了一组权重 \(w\)。那么再让新的输入进来的时候,他就会自动朝着最相近的 \(K\) 组输入之一靠拢,来实现一个分类器的作用,其中分类的基准是这些预先“记忆”的吸引子。下面是个不错的例子。左侧是初始模式,右侧是四个输入,他们分别最后被联想成了 \(3\),其实就是分类进了 \(3\)。
所以,Hopfield 网络常常可以用于联想记忆,因此又称联想记忆网络。与人脑的联想记忆功能类似,Hopfield 网络实现联想记忆需要两个阶段:
- 记忆阶段
在记忆阶段,外界输入的数据使得系统自动调整网络的权值,最终用合适的权值使系统具有若干个稳定状态,即吸引子(attractor)。其吸引域半径定义为吸引子所能吸引的状态的最大距离。吸引域半径越大,说明联想能力越强。联想记忆网络的记忆容量定义为吸引子的数量。
- 联想阶段
在联想阶段,对于给定的输入模式,系统经过一定的演化过程,最终稳定收敛于某个吸引子。
结构特点
此处 HNN 专指 DHNN(离散的,神经元 \(= +1/-1\))。
-
只有单层。虽然这个地方定义层有点诡异。
-
每个神经元可以处于激活(通常表示为 \(+1\))或未激活(表示为 \(-1\))的状态。神经元节点之间是全连接的,且权重对称。
-
只有输入,没有输出。
-
可以到达稳定状态。
权重和势能函数
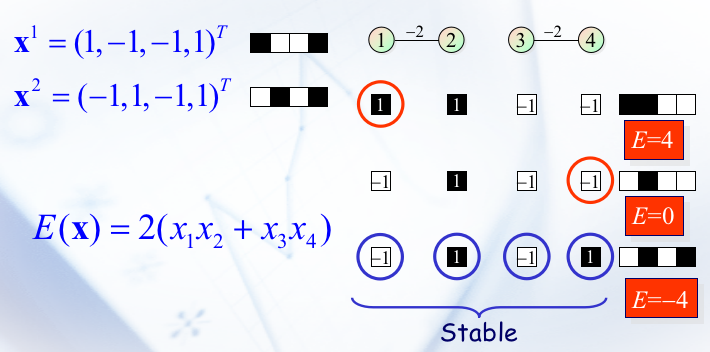
势能函数 \(E\)。取自热力学概念,当 \(E\) 最小时,系统进入稳定。对于当前的联想分类问题,则是会让数据进入到某个吸引子状态。具体可以让参考下图:

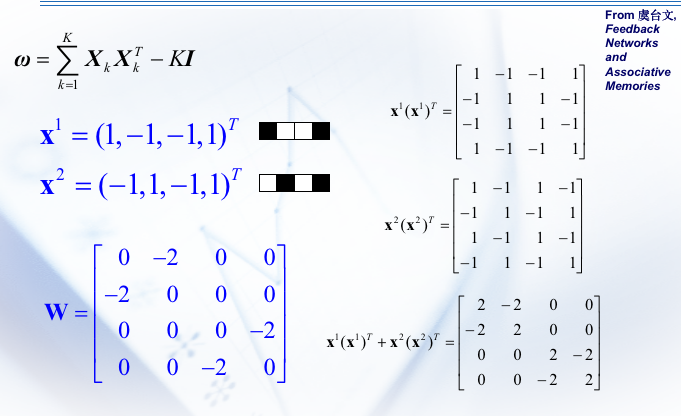
Hopfield 证明了当权重满足下述条件时,\(E\) 一定会来到极小值处:
因此假设我们预先准备了 \(K\) 组吸引子 \(X_1~X_K\),这些吸引子的长度为 \(n\),那么可以通过这种方式得到一组符合要求的权重(两种表述):
进一步,势能函数可以如此定义。
- With input
- Without input
其中,\(s_i\) 表示的是第 \(i\) 个神经元的状态。\(I_i\) 表示的则是输入的第 \(i\) 项。值得一提的是,权重矩阵 \(w\) 的边长 = 外部输入向量 \(I\) 的长度 = 初始设置的吸引子的边长。举个例子来说,就是把鸭子分类成鸭子,那这两个鸭子需要是同一个形态的。很神奇的一个构造是,神经元的数量恰好等于吸引子的长度。
以下是一个例子:
而关于怎么走到一个稳定状态,似乎是看脸? 我本来以为真的是瞎选的,结果 G4 老师说:
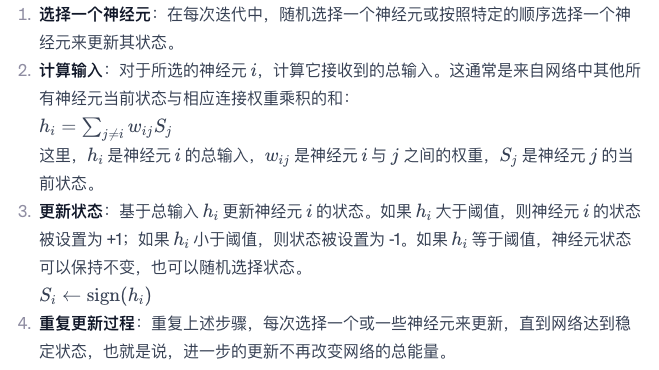
这一步 \(S \to h\) 的过程就是一个时序的过程。更新神经元 \(i\) 的状态时,确实是在计算从时间 \(t\) 到 \(t+1\) 的转变。另外,每个神经元的状态更新只由其他神经元的状态决定,而不是由它自身的当前状态直接决定。具体原因还是看 G 老师吧:
DHNN 解决 TSP 问题
一步转化。假设第 \(i\) 个时刻到达了第 \(j\) 个城市。那么这个 \(n\times n\) 的矩阵显然满足以下条件:
-
每行只能有一个神经元“开启”。
-
每列只能有一个神经元“开启”。
-
对于 \(n\) 个城市的问题,将开启 \(n\) 个神经元。
上课也没讲后续怎么做,什么拉格朗日乘子法什么玩意的,或者是经过一些奥妙重重的方式把 TSP 的势能函数抽象出来,总之是没懂。留点儿公式吧。
LSTM
看不懂啦
SOFM 自组织特征映射
Self-Organizing Feature Map (SOFM) of Kohonen ,一种无监督学习的神经网络,用于降维的同时保存数据的拓扑信息,属于竞争学习的范畴。SOFM 通常将高维输入映射到一维或二维的输出空间中。在这个映射过程中,它保持了输入数据的拓扑结构,即相似的输入数据在映射后的空间中仍然保持相似性。
e.g. 对人进行建模。打标签的方式,可以用 SOFM 降维。
三大原则
-
自我强化 (Self-organization):
- SOFM 的自我组织能力指的是网络在没有外部干预的情况下,通过内部机制形成有组织的结构。这是通过逐渐调整神经元权重实现的,使得相似的输入会激活相邻的神经元。
-
竞争(Competition):
- 在每次迭代中,所有神经元会竞争对当前输入向量的响应。最终,仅有一个(或一小组)神经元成为赢家,即所谓的“胜者通吃”原则。
-
协同 (Cooperation):
- 获胜的神经元不仅会调整自己的权重来更好地匹配输入,还会影响其邻近神经元的权重,从而在网络中形成局部的拓扑结构。
最后形成的局面会长这样,是以上全部特性共同缔造的结果。
应用
SOFM 应用广泛,包括数据可视化、模式识别、分类和聚类分析等领域。通过SOFM,复杂或高维的数据可以以更直观的方式被展现和解释。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号