OmniNxt 调研
1. 资料
项目主页:https://hkust-aerial-robotics.github.io/OmniNxt/
视频介绍:https://www.bilibili.com/video/BV1AK421Y7Vz
OmniNxt 四目标定包录制流程: https://www.bilibili.com/video/BV1gW421d73g
代码:https://github.com/HKUST-Aerial-Robotics/D2SLAM/tree/pr_fix_main
论文:https://arxiv.org/html/2403.20085?_immersive_translate_auto_translate=1
论文笔记:https://www.cnblogs.com/odesey/p/18664082
Nxt-FC 飞控 实飞视频: https://www.bilibili.com/video/BV1Kc411s7zb
四目鱼眼相机--OAK-4P-New:https://www.oakchina.cn/product/oak-4p-new/
2. 复现
git clone --branch pr_fix_main https://github.com/HKUST-Aerial-Robotics/D2SLAM.git
# fatal: 远端意外挂断了5/9623), 118.98 MiB | 1.10 MiB/s
# fatal: 过早的文件结束符(EOF)
# fatal: index-pack 失败
# 解决:
git clone --branch pr_fix_main git@github.com:HKUST-Aerial-Robotics/D2SLAM.git
cd D2SLAM/docker
# 参考: https://github.com/HKUST-Aerial-Robotics/D2SLAM/blob/3a4b8071f6f9c40a151c7685aa738b717ce8916a/docker/Makefile#L12
make x86
git clone https://github.com/facebookresearch/faiss.git 在docker 中一直下载失败,因此手动下载再 copy 到镜像中。
后面的 git clone 还是失败,因此,加入了:
ENV http_proxy=http://10.42.0.1:7890
ENV https_proxy=http://10.42.0.1:7890
RUN set -x && \
: "test network proxy" && \
curl -I google.com
# 配置 Git 代理
RUN git config --global http.proxy http://10.42.0.1:7890 && \
git config --global https.proxy http://10.42.0.1:7890 && \
git config --global --list
RUN git clone https://github.com/opencv/opencv_contrib.git -b ${OPENCV_VERSION}
3. 运行
docker run -it --rm --net=host --env DISPLAY=$DISPLAY --volume /tmp/.X11-unix:/tmp/.X11-unix --privileged --gpus all --volume /home/h/docker_workspace:/workspace --name omninxt hkustswarm/d2slam:x86 /bin/bash
其他
全向避障、全景视觉SLAM、无人机全景成像:https://www.oakchina.cn/product/oak-4p-new/
下载最新的 d2slam 代码:
make amd64
# 恒久的等待
docker run -it --rm --net=host --env DISPLAY=$DISPLAY --volume /tmp/.X11-unix:/tmp/.X11-unix --privileged --gpus all --volume /home/h/docker_workspace:/workspace --name omninxt hkustswarm/d2slam:x86 /bin/bash
代码测试
source devel/setup.bash
roslaunch d2vins quadcam.launch
https://hub.docker.com/r/hkustswarm/d2slam/tags
docker pull hkustswarm/d2slam:x86
git clone --branch pr_fix_main https://github.com/HKUST-Aerial-Robotics/D2SLAM.git
./start_docker_86.sh 1
wget https://github.com/gabime/spdlog/archive/refs/tags/v1.12.0.tar.gz && \
tar -zxvf v1.12.0.tar.gz && \
cd spdlog-1.12.0 && \
mkdir build && cd build && \
cmake .. && make -j$(nproc) && \
make install
source "/opt/ros/${ROS_VERSION}/setup.bash" && \
catkin config -DCMAKE_BUILD_TYPE=Release \
--cmake-args -DONNXRUNTIME_LIB_DIR=/usr/local/lib \
-DONNXRUNTIME_INC_DIR=/usr/local/include && \
catkin build -j10
x86 docker 复现:
1. 环境准备
docker hub 镜像:https://hub.docker.com/r/hkustswarm/d2slam/tags
# 本机:
docker pull hkustswarm/d2slam:x86
git clone --branch pr_fix_main https://github.com/HKUST-Aerial-Robotics/D2SLAM.git
./start_docker_86.sh 1
# 容器内:
## 下载所需依赖
wget https://github.com/gabime/spdlog/archive/refs/tags/v1.12.0.tar.gz && \
tar -zxvf v1.12.0.tar.gz && \
cd spdlog-1.12.0 && \
mkdir build && cd build && \
cmake .. && make -j$(nproc) && \
make install && \
rm v1.12.0*
# 用来看 ros 图像
apt update && \
apt install ros-noetic-rqt-image-view && \
rqt_image_view
# 编译
source "/opt/ros/${ROS_VERSION}/setup.bash" && \
catkin config -DCMAKE_BUILD_TYPE=Release \
--cmake-args -DONNXRUNTIME_LIB_DIR=/usr/local/lib \
-DONNXRUNTIME_INC_DIR=/usr/local/include && \
catkin build -j10
2. 下载数据集
百度云:https://pan.baidu.com/s/1qyRUHUeVCvORXM4CrIZCxg?pwd=D2SL
下载的文件:
quad_cam_calib-camchain-imucam-7-inch-n3.yaml
eight_noyaw_1-groundtruth.txt
eight_noyaw_1-sync.bag
3. 修改配置文件:
/root/swarm_ws/src/D2SLAM/config/quadcam/quadcam_single_test.yaml
%YAML:1.0
#inputs
imu: 1
imu_topic: "/dji_sdk_1/dji_sdk/imu"
image0_topic: "/arducam/image"
is_compressed_images: 1
imu_freq: 400
image_freq: 16
frame_step: 3
#Camera configuration
camera_configuration: 3 #STEREO_PINHOLE = 0, STEREO_FISHEYE = 1, PINHOLE_DEPTH = 2, FOURCORNER_FISHEYE = 3
calib_file_path: "quad_cam_calib-camchain-imucam-7-inch-n3.yaml"
extrinsic_parameter_type: 1 # 0: cam^T_imu 1: imu^T_cam //NXT use 0, D2SLAM dataset use 1
image_width: 1280
image_height: 800
enable_undistort_image: 1
undistort_fov: 200
width_undistort: 800
height_undistort: 400
photometric_calib: "mask.png"
avg_photometric: 0.7
sp_track_use_lk: 1
image_queue_size : 10
#frontend frequency
loop_detection_freq: 1
lcm_thread_freq: 1
#estimation
not_estimate_first_extrinsic: 0
estimate_extrinsic: 0 # 0 Have an accurate extrinsic parameters. We will trust the following imu^R_cam, imu^T_cam, don't change it.
estimate_td: 0 # online estimate time offset between camera and imu
td: -0.186 # For new datasets with filter
estimation_mode: 0
double_counting_common_feature: 0
min_inv_dep: 0.01 #100 meter away.
#optimization parameters
max_solver_time: 0.08 # max solver itration time (ms), to guarantee real time
max_num_iterations: 8 # max solver itrations, to guarantee real time
consensus_max_steps: 4
timout_wait_sync: 100
rho_landmark: 1.0
rho_frame_T: 100
rho_frame_theta: 100
relaxation_alpha: 0.
consensus_sync_for_averaging: 0
consensus_sync_to_start: 0 #Is sync on start of the solving..
consensus_trigger_time_err_us: 100
#depth fusing
depth_far_thres: 3.0 # The max depth in frontend
depth_near_thres: 0.3
fuse_dep: 0 #if fuse depth measurement
max_depth_to_fuse: 5.0
min_depth_to_fuse: 0.3
#Multi-drone
track_remote_netvlad_thres: 0.5
#Initialization
init_method: 0 #0 IMU, 1 PnP
depth_estimate_baseline: 0.03
#sliding window
max_sld_win_size: 10
landmark_estimate_tracks: 4 #when use depth or stereo, 3 is OK.
min_solve_frames: 6
#solver
multiple_thread: 4
#outlier rejection
thres_outlier : 10.0
perform_outlier_rejection_num: 10000
tri_max_err: 0.2
#Marginalization
enable_marginalization: 1
margin_sparse_solver: 1
always_fixed_first_pose: 0
remove_base_when_margin_remote: 2
# When set to 2, will use the all relevant measurements of the removing frames to compute the prior,
# and the baseFrame (where!=removeID) will not be removed. This may lead to double counting of this baseFrame measurement: but it's stable.
# When set to 1, will remove the baseframe's measurements of those measurements which is not base on current frame.
# set to 0 those measurements (which on a landmark's baseFrame is not been removed) will be ignore.
#feature tracker parameters
max_cnt: 100 # max feature number in feature tracking
max_superpoint_cnt: 100 # max feature extraction by superpoint
max_solve_cnt: 500
check_essential: 0
enable_lk_optical_flow: 1 #enable lk opticalflow featuretrack to enhance ego-motion estimation.
use_gpu_feature_tracking: 0 # 1 use gpu, 0 use cpu
use_gpu_good_feature_extraction: 0 # 1 use gpu, 0 use cpu
remote_min_match_num: 20
enable_superglue_local: 0
enable_superglue_remote: 0
ransacReprojThreshold: 10.0
enable_search_local_aera: 1
search_local_max_dist: 0.05
parallex_thres: 0.012
knn_match_ratio: 0.8 #This apply to superpoint feature track & loop clouse detection.
#CNN
cnn_engine: 0 # 0 use onnx; 1 use tensorrt raw engine
cnn_use_onnx: 1
enable_pca_superpoint: 1
nn_engine_type: 1 # 0 use onnx; 1 use tensorrt raw engine
# superpoint_trt_path: "/root/swarm_ws/src/D2SLAM/models/superpoint_v1_dyn_size_onnx_400x200.trt"
# moblieNetVlad_trt_path: "/root/swarm_ws/src/D2SLAM/models/mobilenetvlad_dyn_size_onnx_400x200.trt"
#Superpoint
superpoint_config:
onnx_path: "/root/swarm_ws/src/D2SLAM/models/superpoint_series/superpoint_v1_sim_int32.onnx"
trt_engine_path: "/root/swarm_ws/src/D2SLAM/models/superpoint_series/superpoint_v1_sim_int32_800x400.trt"
enable_fp16: 1
input_width: 800
input_height: 400
input_tensor_names:
- "input"
output_tensor_names:
- "scores" # keypoint output
- "descriptors" # descriptor output
# these two parameters sequence must follow the given output sequence.
threshold: 0.15
nms_radius: 20
enable_pca: 1
pca_mean_path: "/root/swarm_ws/src/D2SLAM/models/superpoint_series/mean_.csv"
pca_comp_path: "/root/swarm_ws/src/D2SLAM/models/superpoint_series/components_.csv"
superpoint_pca_dims: 64
acc_n: 0.1 # accelerometer measurement noise standard deviation. #0.2 0.04
gyr_n: 0.05 # gyroscope measurement noise standard deviation. #0.05 0.004
acc_w: 0.002 # accelerometer bias random work noise standard deviation. #0.002
gyr_w: 0.0004 # gyroscope bias random work noise standard deviation. #4.0e-5
g_norm: 9.805 # gravity magnitude
#Loop Closure Detection
loop_detection_netvlad_thres: 0.8
enable_homography_test: 1
accept_loop_max_yaw: 10
accept_loop_max_pos: 1.0
loop_inlier_feature_num: 50
gravity_check_thres: 0.03
#PGO
pgo_solver_time: 0.5
pgo_mode: 0
write_g2o: 0
g2o_output_path: "output.g2o"
pgo_solver_time: 1.0
solver_timer_freq: 1.0
enable_pcm: 1
pcm_thres: 2.8
#outputs
output_path: "/root/output/"
debug_print_sldwin: 0
debug_print_states: 0
enable_perf_output: 0
enbale_detailed_output: 0
debug_write_margin_matrix: 0
show_track_id: 0
download the CNN models :https://www.dropbox.com/scl/fi/zdo90dicmqujwio22l8xn/models.zip?rlkey=hvxsmrao904lle3wnrhoid8n7&e=1&dl=0
components_.csv 和 mean_.csv 文件放到:/root/swarm_ws/src/D2SLAM/models/superpoint_series 目录下。其他不用管,好像都有了。
4. 运行:
roslaunch 会自动化 onnx 模型转为 trt 模型:
1. Only launch Omni-VINS:
注意:
depth_gen: 不起作用
rviz 为 false 的话,可以自己打开 rviz,添加主题观看,否则自动打开 rviz
enable_pgo(分布式姿态图优化) 为 true 会导致运行一会报错停止,可能多无人机需要
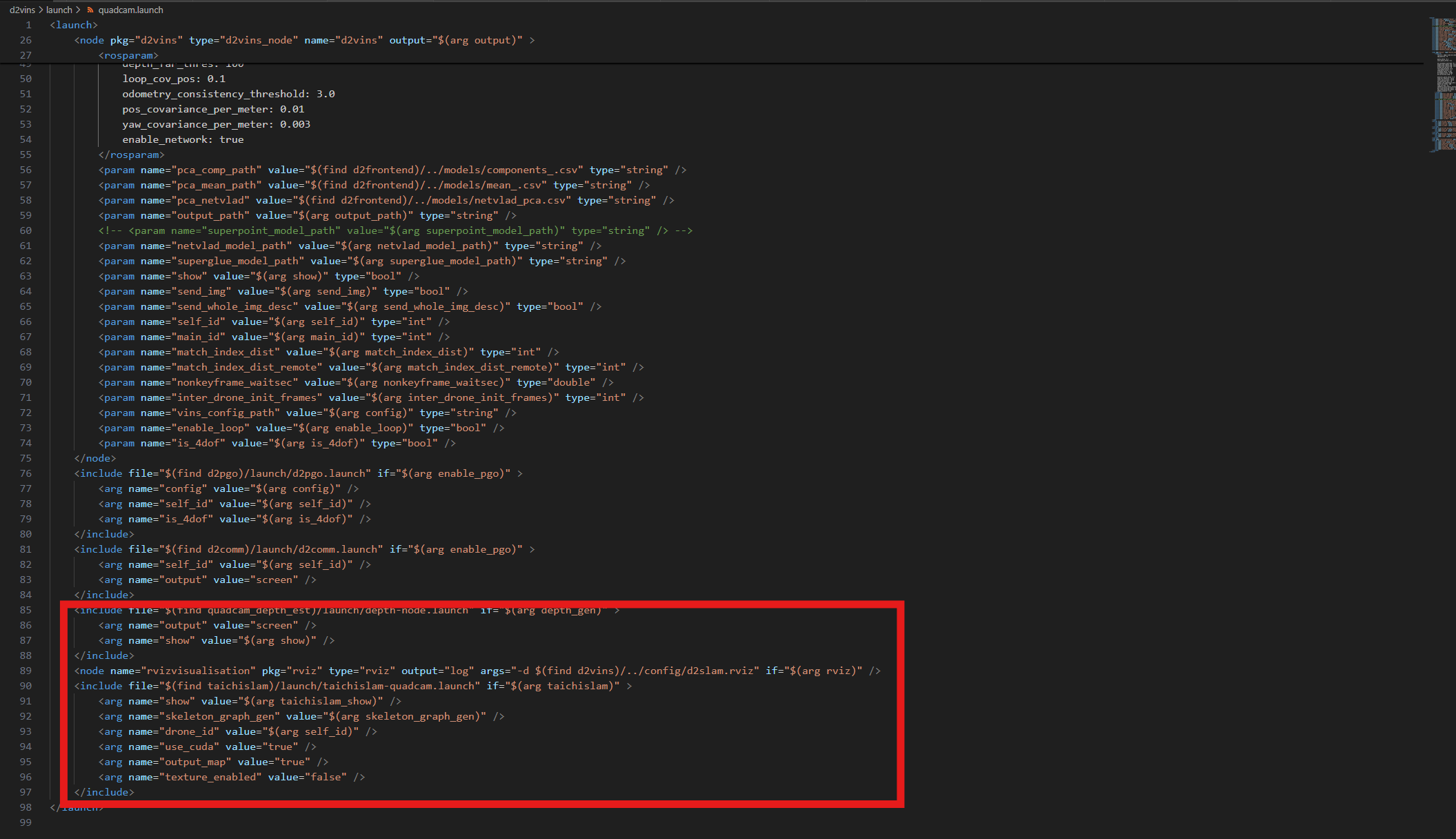
source ./devel/setup.bash
roslaunch d2vins quadcam.launch config:=/root/swarm_ws/src/D2SLAM/config/quadcam/quadcam_single_test.yaml enable_pgo:=false enable_loop:=true depth_gen:=false rviz:=true
正确完成转换:
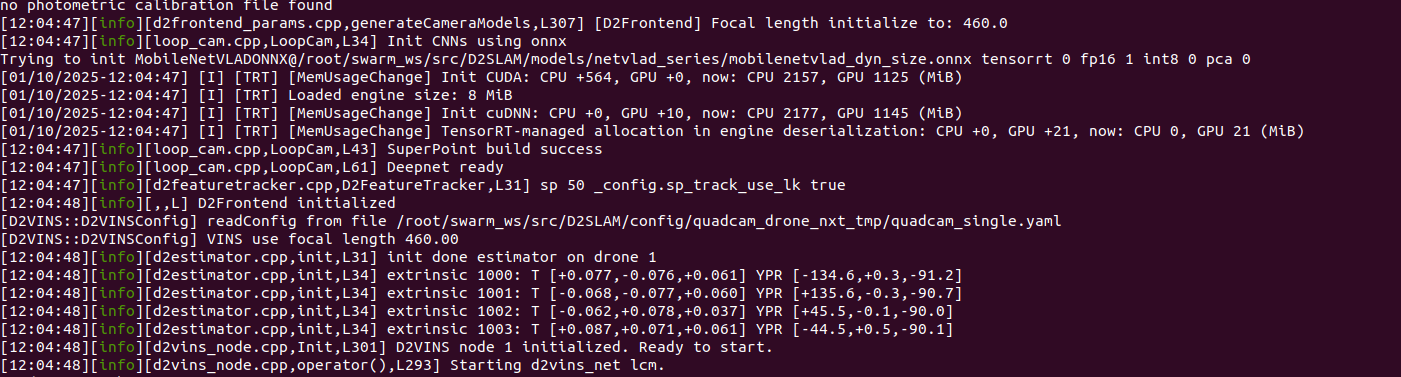
并且你会看到 rviz 输出了轨迹!
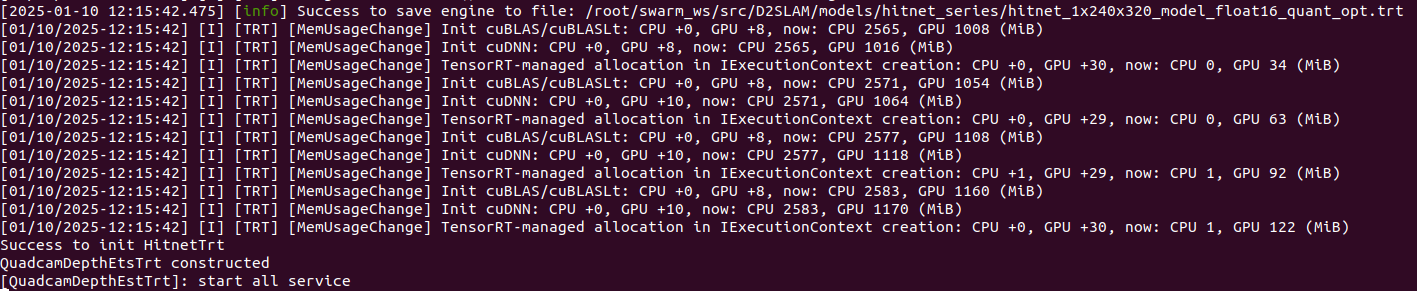
2. Omni-Depth:
roslaunch quadcam_depth_est depth-node.launch
正确完成转换:
另起一个终端:
# 两倍速
rosbag play /data/OmniNxt/eight_noyaw_1-sync.bag -r 2.0
终端2:
source ./devel/setup.bash
roslaunch d2vins quadcam.launch config:=/root/swarm_ws/src/D2SLAM/config/quadcam/quadcam_single_test.yaml enable_pgo:=false enable_loop:=true depth_gen:=false rviz:=true
# depth_gen 不起作用
# rviz 为 false 的话,可以自己打开 rviz,添加主题观看,否则自动打开 rviz


效果看起来有点倾斜!
目前存在的问题:
- 阅读 D2-Slam 的论文和翻译
- 解决轨迹倾斜问题
- 如何全向单独运行深度估计算法
- 下载其他数据的算法测试
- pgo(分布式姿态图优化) 为 true 会导致运行一会报错停止,这个不知道是不是问题?
- 整理和上传到 git

 浙公网安备 33010602011771号
浙公网安备 33010602011771号