MORL | Envelope Q-Learning:有收敛性保证的 MORL 算法
- 论文标题:A Generalized Algorithm for Multi-Objective Reinforcement Learning and Policy Adaptatio。
- NeurIPS 2019。也许是第一个有收敛性保证的 MORL 算法,理论框架非常优雅。
- arxiv:https://arxiv.org/abs/1908.08342
- pdf:https://arxiv.org/pdf/1908.08342
- html:https://ar5iv.labs.arxiv.org/html/1908.08342
- GitHub:https://github.com/RunzheYang/MORL
- 可以参考的实现:MORL-baseline 里的 EQL 。
1 多目标强化学习(Multi-Objective Reinforcement Learning, MORL)
1.1 setting
在多目标强化学习中,我们需要同时优化多个竞争目标,如速度、准确率、成本等。这篇文章的 intro 里举了一个例子:一个虚拟助手,与人类沟通以执行特定任务时,根据用户在成功率或简洁性等方面的相对偏好,可能需要遵循完全不同的策略。例如,提供天气报告时,agent 应该提供尽可能正确、详细的回应;在提供一个完成任务的逐轮引导时,agent 需要找到完成任务的最短路径,而非跟用户输出冗长的语言;这个例子说明,研究 MORL agent 在现实世界中是有对应场景的。
我们的目标是学习一个单一模型,能在所有可能的用户偏好下输出最优策略,并支持快速适应 / 自动推断未知的用户偏好。
1.2 先前方法的问题
- 单策略方法:使用一个 weight \(\boldsymbol \omega\) 来代表人类当前的偏好,去跟多目标 reward 做内积,将多目标加权变成单目标 \(r = \boldsymbol\omega^T \boldsymbol r\);但这种方法只能学一个固定偏好 \(\boldsymbol\omega\),无法适应未知偏好。
- 多策略方法:对多个 weight \(\omega\) 分别训练独立策略,然后把这些策略都存下来,作为 Pareto 前沿。缺点是成本高,比如当 reward 维度 m > 3 时,难以学大量策略来遍历整个 weight 空间。
- 现有的 deep MORL 方法:如标量化 Q 学习,它们更新时只用一个 \(\omega\),无法复用其他 \(\omega\) 探索到的最优轨迹,样本效率低。
本文的动机,是去 fill 现有方法的 gap:既要灵活性(适应任意 \(\omega\)),又要可扩展性(不存一堆策略),还要样本效率(一次探索供所有 \(\omega\) 下的策略更新复用)。
关键是让不同 \(\omega\) 下的学习过程能互相促进而非孤立,而 EQL 通过将经典 RL 的 bellman 更新扩展到向量 reward,并定义凸包更新运算符,巧妙地做到了这一点。
2 Preliminaries: Multi-Objective MDP
2.1 Multi-Objective MDP(MOMDP)
一个 MOMDP 可以表示为一个元组:
其中:
-
\(\mathcal{S}\): 状态空间。
-
\(\mathcal{A}\): 动作空间。
-
\(\mathcal{P}(s' | s, a)\): 状态转移概率分布,表示在状态 \(s\) 执行动作 \(a\) 后转移到状态 \(s'\) 的概率。
-
\(\boldsymbol{r}(s, a)\): 向量奖励函数。这是与标准 MDP 最核心的区别。MOMDP 的 reward 是一个 \(m\) 维向量,其中 \(m\) 是目标的数量:
\[\boldsymbol{r}(s, a) = [r_1(s, a), r_2(s, a), \dots, r_m(s, a)]^\intercal \in \mathbb{R}^m \]每个分量 \(r_i(s, a)\) 代表在状态 \(s\) 执行动作 \(a\) 后,在第 \(i\) 个目标上获得的即时奖励。
-
\(\gamma\): 折扣因子,\(\gamma \in [0, 1)\),用于计算累积回报。
-
\(\Omega\): weight 空间,或者称为偏好空间。其中的每个元素 \(\boldsymbol{\omega}\) 是一个 \(m\) 维向量,表示决策者对各个目标的相对重要性权衡。
\[\boldsymbol{\omega} = [\omega_1, \omega_2, \dots, \omega_m]^\intercal \in \Omega \]通常,偏好向量被约束在一个 m-1 维的单纯形上,即 \(\sum_{i=1}^m \omega_i = 1\) 且 \(\omega_i \geq 0\),但这并非绝对要求。
-
\(f_{\omega}(\cdot)\): 偏好函数。它将向量奖励(或回报)根据 weight \(\boldsymbol{\omega}\) 进行加权,转化为一个标量的 utility。在本文关注的线性设置下,其形式为:
\[f_{\omega}(\boldsymbol{r}(s, a)) = \boldsymbol{\omega}^\intercal \boldsymbol{r}(s, a) = \sum_{i=1}^m \omega_i r_i(s, a) \]
2.2 向量 reward \(\boldsymbol r\) 和 weight \(\boldsymbol \omega\) 下的策略与值函数
我们用策略 \(\pi(a | s, \boldsymbol\omega)\) 表示在 weight \(\boldsymbol \omega\) 下,状态 \(s\) 下选择动作 \(a\) 的概率分布。
-
向量 return:策略 \(\pi\) 从状态 \(s\) 开始获得的 expected discounted return \(\hat{\boldsymbol{r}}^\pi\),是一个 \(m\) 维向量:
\[\hat{\boldsymbol{r}}^\pi(s) = \mathbb{E}_{\pi, \mathcal{P}} \left[ \sum_{t=0}^{\infty} \gamma^t \boldsymbol{r}(s_t, a_t) \ \middle|\ s_0 = s \right] \in \mathbb{R}^m \]\(\boldsymbol{v}^\pi(s) = \hat{\boldsymbol{r}}^\pi(s)\) 被称为向量值函数。
-
标量化的 utility:在给定 weight \(\boldsymbol{\omega}\) 下,策略 \(\pi\) 的标量化 utility 就是其向量 return 跟 weight \(\boldsymbol{\omega}\) 的内积:
\[U^\pi(s, \boldsymbol{\omega}) = \boldsymbol{\omega}^\intercal \boldsymbol{v}^\pi(s) = \mathbb{E}_{\pi, \mathcal{P}} \left[ \sum_{t=0}^{\infty} \gamma^t \boldsymbol{\omega}^\intercal \boldsymbol{r}(s_t, a_t) \ \middle|\ s_0 = s \right] \]这相当于将原始的 MOMDP 转换为一个奖励函数为标量 \(r_\omega(s, a) = \boldsymbol{\omega}^\intercal \boldsymbol{r}(s, a)\) 的标准 MDP。
2.3 求解目标:帕累托前沿
在单目标 RL 中,最优策略是使标量回报最大化的策略。然而,在 MORL 中,目标是冲突的,所有通常不存在一个在所有目标上都最优的“全能”策略。因此,我们引入以下概念:
帕累托最优:一个策略 \(\pi\) 是帕累托最优的,当
- 不存在另一个策略 \(\pi'\),使得在所有目标 \(i\) 上都有 \(v_i^{\pi'}(s) \geq v_i^{\pi}(s)\),即,不存在其他策略 dominate 它;
- 并且,至少存在一个策略 \(v_j^{\pi}(s)\),在一个目标 \(j\) 上,\(v^{\pi}(s)\) 严格大于 \(v_j^{\pi}(s)\)。
所有帕累托最优策略对应的向量 return 集合,构成了帕累托前沿 \(\mathcal{F}^*\)。
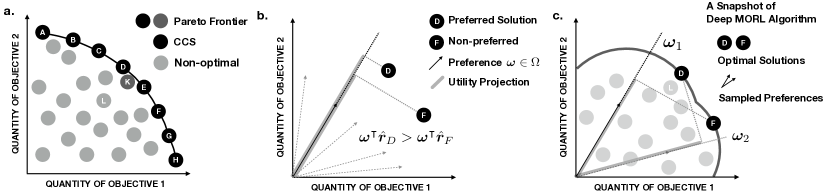
对于本文关注的 线性偏好 形式,我们关心帕累托前沿的 凸覆盖集(CCS),它是帕累托前沿的凸子集:
我们解释一下 CCS。如下图 最右的子图所示,帕累托前沿可能是凹的。使用本文的线性 weight 加权多目标方法,没法得到这个 凹 帕累托前沿的全部。具体的,对于前沿上最凹的那个点,因为点 D 和点 F 的向量 return 与凹点的 weight \(w\) 点乘,值反而比凹点的 return 点乘更大,所以 \(w\) 下我们求解的策略,跟点 D / F 处的策略是一样的,而 D F 之间的那一段帕累托前沿,我们求解不到。
3 Method: Envelope Q-Learning
3.1 Q function 以及 Q 空间中的距离度量
首先,论文重新定义了向量 Q function 和衡量两个 Q function 距离的方式。
多目标 Q function:传统的 Q 函数是标量的,而这里定义的是一个向量 Q 函数 \(\boldsymbol{Q}(s, a, \boldsymbol{\omega})\),它输出一个 \(m\) 维向量,估计在状态 \(s\)、动作 \(a\) 和偏好 \(\boldsymbol{\omega}\) 下的期望向量 discounted return。
整个 Q 空间记为 \(\mathcal{Q} \subseteq (\Omega \rightarrow \mathbb{R}^m)^{\mathcal{S} \times \mathcal{A}}\)。
向量 Q 函数空间中的距离度量:为了在这个空间中进行收敛性分析,我们定义一个伪度量(pseudo-metric),它度量两个向量 Q function 之间的一个标量距离:
解释:这个度量的值,是两个多目标 Q 函数在 所有状态、动作和 weight 下,其标量化 utility 的最大差异。
它是一个伪度量,因为即使 \(d(\boldsymbol{Q}, \boldsymbol{Q}') = 0\),\(\boldsymbol{Q}\) 和 \(\boldsymbol{Q}'\) 的向量值也可能在非最优的凹陷处不同,但只要它们对所有 \(\boldsymbol{\omega}\) 的 utility 相同,就被认为是“等价”的。
在接下来,我们将会把 bellman 算子拓展到多目标上,让拓展后的 bellman 算子,对于这个距离定义,是一个压缩映射。
3.2 单目标 bellman 算子的多目标拓展
这一部分是方法的核心,它扩展了经典的单目标 bellman 最优性算子。
首先,我们介绍一个算子 Envelope Optimality Filter \(\mathcal{H}\)。这是 EQL 与传统单目标 Q learning 最根本的区别:标量化方法在更新 Q 函数时,Q(s', a') 只对动作 a' 取最大值,而我们的 envelope 方法,同时对动作 a' 和 weight w' 取最大值。
公式解释:
- H 是一个施加于 Q 的 operator,它得到一个 arg Q,这个 Q 是 m 维向量,满足以下条件:它是给定 weight \(\boldsymbol{\omega}\) 下,在下一个状态 \(s'\),与 \(\boldsymbol{\omega}\) 相乘的 utility 最大的 Q 函数。延续单目标 bellman update 的思路,这代表着,我们要为下一个状态 \(s'\) 找一个最好的 action,使得它在当前 weight \(\boldsymbol{\omega}\) 下的 utility 是最大的。这一步很自然,相当于 \(\arg_Q \sup_a Q(s,a)\),是经典的 bellman value iteration 思路。
- 然而,在公式里,H 不仅 sup 了 a,还 sup 了 \(\boldsymbol{\omega}' \in \Omega\)。这一步的含义是,我们为 \(s'\) 找最好的 Q 时,不仅考虑当前 \(\boldsymbol{\omega}\) 下的策略 \(\pi(\cdot|s',\boldsymbol{\omega})\),也去考虑其他策略 \(\pi(\cdot|s',\boldsymbol{\omega}')\),说不定其他 weight \(\boldsymbol{\omega}'\) 下的策略更好呢?所以,最终得到了这样的 H 形式。
- \(\arg_{Q}\) 的含义是,这个算子返回的是使得上述 utility 最大的那个向量 Q 值 \(\boldsymbol{Q}(s', a', \boldsymbol{\omega}')\) 本身,而不是那个最大的标量 utility。
抽象理解:H 不是在寻找一个单一的最优动作,而是在寻找当前 Q 函数所代表的整个解前沿的凸包。它允许算法“借用”在其他 weight \(\boldsymbol{\omega}'\) 下学到的最优 Q 值,来更新当前 weight \(\boldsymbol{\omega}\) 下的 Q 值。
然后,我们根据上述的 H,定义广义 bellman 最优性算子 \(\mathcal{T}\):
不断让 Q ← TQ,就可以完成多目标下的 value iteration。这个公式的基本思想仍是 \(Q(s,a) \leftarrow r(s,a) + \gamma\sup_{a'} Q(s',a')\),只不过使用了 H 算子完成后面的 sup 操作。
3.3 理论保证(收敛性)
论文提供了三个关键定理,确保其方法的正确性:
- 定理 1(不动点):最优的多目标 Q 函数 \(\boldsymbol{Q}^*\) 是 \(\mathcal{T}\) 算子的不动点:\(\boldsymbol{Q}^* = \mathcal{T}\boldsymbol{Q}^*\)。
- 定理 2(收缩性):算子 \(\mathcal{T}\) 在伪度量 \(d\) 下是一个收缩映射:\(d(\mathcal{T}\boldsymbol{Q}, \mathcal{T}\boldsymbol{Q}') \leq \gamma d(\boldsymbol{Q}, \boldsymbol{Q}')\)。
- 定理 3(广义巴拿赫不动点定理):在 Q 空间中,迭代使用 \(\mathcal{T}\) 会收敛到一个与 \(\boldsymbol{Q}^*\) 在度量 \(d\) 下等价的函数。
这些定理跟单目标的 value iteration 非常像。它们保证了,无论初始 Q 函数如何,通过反复应用 \(\mathcal{T}\) 进行更新,最终都能学到对于所有偏好 \(\boldsymbol{\omega}\) 都最优的 Q 函数。
3.4 具体的 loss function
在实践中,我们用一个神经网络 \(\boldsymbol{Q}(s, a, \boldsymbol{\omega}; \theta)\) 来近似 \(\boldsymbol{Q}\),它的输出是 s、a、w,输出是 m 维的向量 Q 值。
通过最小化以下的 loss function,我们学习参数 \(\theta\)。
首先,belllman 更新的 更新目标 是 \(\boldsymbol{y} = \boldsymbol{r} + \gamma \arg_{Q} \max_{a', \boldsymbol{\omega}'} \boldsymbol{\omega}^\intercal \boldsymbol{Q}(s', a', \boldsymbol{\omega}'; \theta_{k}^{-})\),其中 \(\theta_{k}^{-}\) 是 target network(如果使用 DDQN)的参数。
主损失 \(L^A\)(向量的 MSE 误差):试图让向量 Q 函数接近目标。
这个 loss 确保 Q 函数能准确预测未来的向量回报,然而,优化起来可能很困难,因为解前沿包含大量离散点,导致损失函数可能非常不平滑。
辅助损失 \(L^B\)(效用的 L1 误差):让 Q 函数预测的标量 utility 接近目标 utility,loss function 是它们差的绝对值。
这个损失更平坦,更容易优化,但可能有很多解。
最终损失 \(L\)(homotopy optimization):
其中 \(\lambda\) 从一个较小的值(如 0)逐渐增加到 1。这代表着,我们先优化 \(L^A\),再优化 \(L^B\);先确保 Q 的预测比较接近最优,再沿各个 weight 的方向细致地优化 utility。
(可能 EQL 只适用于离散 action,跟 DQN 一样)
4 tricks
上述理论框架本身是优雅的,但要让其在实践中真正有效,论文使用了几个关键的工程技巧:
1 homotopy 优化:
- 问题:直接优化 \(L^A\) 很难(地形崎岖),而直接优化 \(L^B\) 又太简单(地形平坦,解不唯一),可能导致模型收敛到一个在向量预测上不准确的解。
- 技巧:使用同伦优化,在训练初期主要使用 \(L^A\),确保 Q 函数的向量预测朝着真实期望回报的方向发展。然后,逐渐引入 \(L^B\),将优化过程引导至一个在 utility 上也最优的区域。
2 hindsight 经验回放:
- 问题:为了学习所有偏好下的策略,需要大量的交互数据。如果为每个偏好都收集数据,样本效率会极低。
- 技巧:从环境中采样一条轨迹(由某个随机偏好 \(\boldsymbol{\omega}_{\text{exec}}\) 生成)后,在更新时,从 replay buffer 取出该转移 \((s, a, \boldsymbol{r}, s')\),并为其关联上一组随机采样的新 weight \(\{\boldsymbol{\omega}_1, ..., \boldsymbol{\omega}_{N_\omega}\}\)。然后,用这些新 weight 来计算损失并进行更新。实验中,每个转移样本会与 \(N_\omega = 32\) 个额外采样的偏好一起用于更新。
- 效果:一条在特定 weight 下收集的轨迹,可以被“重新解释”并用于更新其他 weight 下的 Q 函数,极大提高了样本效率。
3 对最优性滤波器 \(\mathcal{H}\) 的 mini-batch 近似:
- 问题:理论上,\(\mathcal{H}\) 需要在所有动作和所有 weight 上求极大值,这在连续或大的 weight 空间中,是计算上不可行的。
- 技巧:在实践中,不在整个空间上计算,而是在每个训练 mini-batch 中,仅在当前 batch 内出现的动作和 weight 上近似计算这个极大值。虽然这是一种近似,但实验证明它非常有效,并且随着训练的进行,batch 中的样本会逐渐覆盖最优解,使得近似越来越准确。
5 实验
5.1 task
这篇文章做了 4 个 task:
| 任务名称 | state | action | 一步 reward | 任务描述 |
|---|---|---|---|---|
| Deep Sea Treasure (DST) | 智能体坐标 (x, y) | 上、下、左、右 | (时间惩罚, 宝藏价值) | 在网格世界中导航,权衡时间成本与宝藏价值。 |
| Fruit Tree Navigation (FTN) | 当前节点坐标 | 进入左子树或右子树 | (蛋白质, 碳水, 脂肪, 维生素, 矿物质, 水) | 在二叉树中从根节点走到叶子节点,根据营养偏好选择最优“水果”。 |
| Task-Oriented Dialog | 对话状态(用户目标、历史等) | 对话动作(询问、确认、提供信息等) | (对话轮数惩罚, 任务成功奖励) | 在餐厅预订系统中,平衡对话成功率和对话简洁性。 |
| Multi-Objective SuperMario | 连续 4 帧游戏画面 | 7 个动作(左、右、跳、跑等组合) | (位置进度, 时间惩罚, 死亡惩罚, 收集硬币, 消灭敌人) | 同时优化游戏进度、速度、生存、收集和战斗多个目标。 |
在学习阶段,agent 需要学习覆盖所有可能 weight 的策略,也就是去学习帕累托前沿。而在测试 / 适应阶段,我们可能直接给定 weight 执行策略,也可能在给定标量奖励的情况下,让 agent 快速推断出隐藏的 weight。
5.2 baselines
论文与三类基线方法进行对比(这是 deepseek 总结的,我没有细看):
- MOFQI:基于线性模型的传统多目标 Fitted Q-Iteration。缺点:无法处理高维状态(如游戏图像),可扩展性差。
- CN+OLS:使用条件神经网络,外层用 Optimistic Linear Support 算法搜索 weight。缺点:在目标数量多(>3)时,OLS 计算成本极高,难以应用。
- Scalarized:最强的基线,看起来也是最接近 EQL 的方法。使用一个神经网络,输入状态和 weight,输出标量 Q 值。通过标量化奖励(\(r_\omega = \boldsymbol{\omega}^\intercal \boldsymbol{r}\))进行 Q 学习,并使用了 Hindsight Experience Replay 等技巧。缺点:更新时只考虑当前偏好,无法跨偏好共享信息,样本效率较低。
5.3 metrics
- 覆盖率 (CR):
- 含义:衡量学习阶段找到所有潜在最优策略的能力。
- 计算:类似于分类问题中的 F1 分数,是准确率(找到的策略中有多少是最优的)和召回率(所有最优策略中找到了多少)的调和平均数。
- 平均效用 (UT):在大量随机采样的偏好下,智能体获得的平均标量 utility。是 AE 的一个便捷代理指标。
- 适应误差 (AE) / 适应质量 (AQ):在适应阶段,对给定偏好 \(\boldsymbol{\omega}\),智能体策略的效用与理论最优效用的差距。AE 越小越好,AQ 越大越好(\(AQ = 1/(1+\alpha \cdot AE)\))。
- 偏好推断准确率:反推的 ω 与真实 ω 的 L1 距离,越小越好。
- (其实常用 MORL metrics 还有 hypervolume,但这篇看起来没有用)
5.4 具体实验结果
在四个 task 的所有主要指标上,EQL 均稳定优于或持平所有 baseline。
关键优势:
- 样本效率:在 FTN 任务中,要达到相同的性能,EQL 方法所需的交互数据(\(N_\omega\))远少于Scalarized 方法。
- 可扩展性:当问题变复杂(如 FTN 树的深度从 5 增加到 7),EQL 的性能下降远小于 Scalarized 方法,表现出更好的鲁棒性和可扩展性。
- 偏好推断:在隐藏 weight 的测试中,Envelope 方法仅用 15 个回合(FTN)或 100 个回合(SuperMario)就能较准确地推断出底层 weight,且比 Scalarized 方法更接近真实 weight。
5.5 细节实验设置
关键超参数与Trick:
- Hindsight Experience Replay:每个转移样本会与 \(N_\omega = 32\) 个额外采样的偏好一起用于更新。
- Double Q-learning & 目标网络:用于稳定训练,减少过高估计。
- Prioritized Experience Replay:根据时序差分误差(TD-error)的优先级进行采样,先学 TD-error 大的样本,加速学习。
- 探索策略:使用 \(\epsilon\)-greedy,\(\epsilon\) 从 0.5 线性衰减至 0。
网络结构:
- 向量 Q 网络:所有方法都使用同样架构的网络。使用 4 层全连接网络,输入为 state 向量和 weight 向量的拼接。输出层大小为 \(|\mathcal{A}| \times m\)(Envelope)或 \(|\mathcal{A}|\)(Scalarized)。
- MoA3C (for SuperMario):使用卷积网络处理图像,后将特征与偏好拼接,再输入全连接层。
6 总结
本文提出的 Envelope Q-Learning 算法,通过定义向量 Q 函数和 envelope 最优算子,将经典 RL 的 bellman 优化拓展到多目标 RL 上,在理论上保证了多目标策略的收敛性。实践上,EQL 使用了 homotopy 优化、double Q network、HER、PER 等 trick,加速策略收敛。个人认为,这是一个非常优雅的多目标 RL 框架,为 MORL 提供了强大的理论和算法工具。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号