/*
Ping))) Sensor
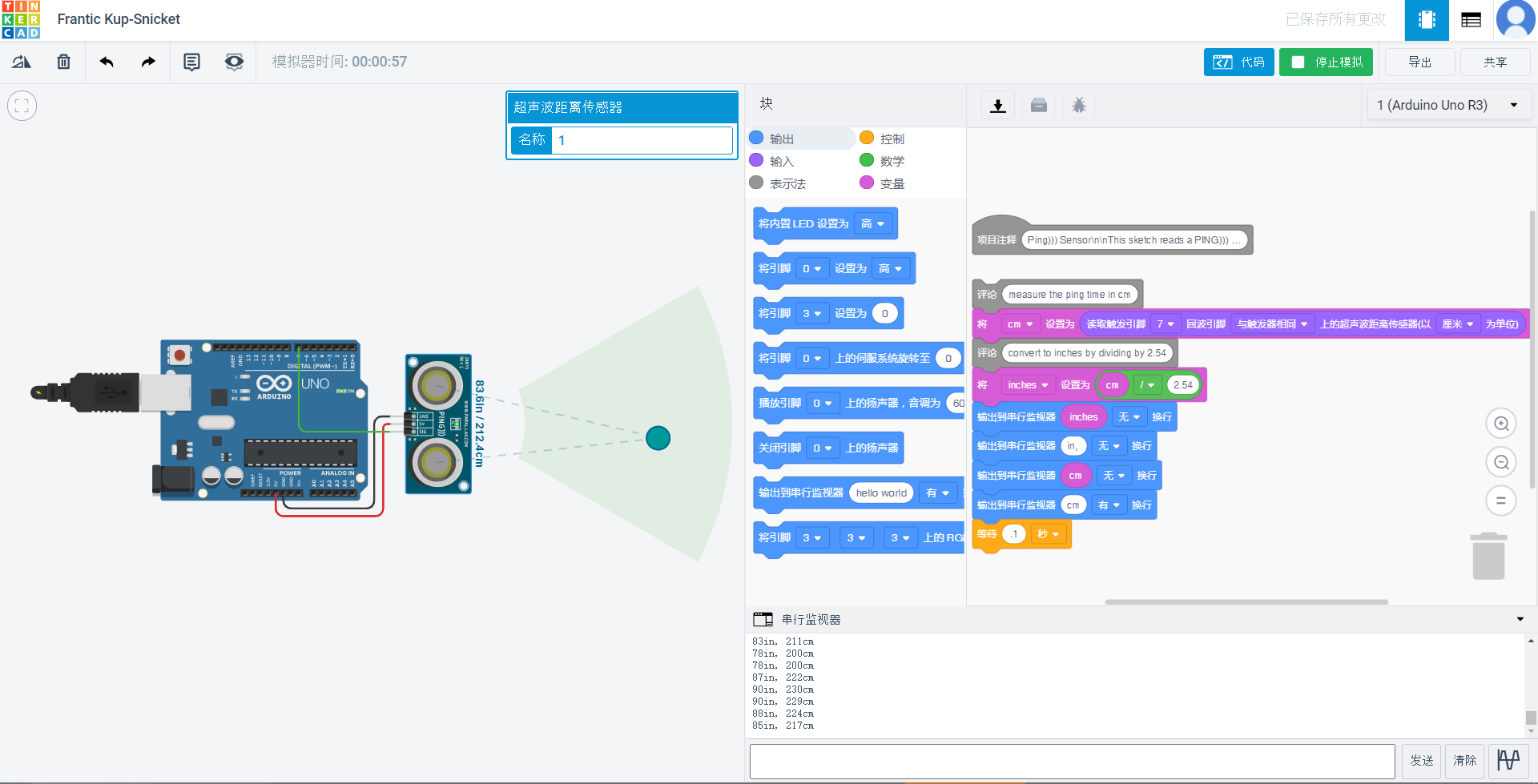
This sketch reads a PING))) ultrasonic
rangefinder and returns the distance to the
closest object in range. To do this, it sends a
pulse to the sensor to initiate a reading, then
listens for a pulse to return. The length of
the returning pulse is proportional to the
distance of the object from the sensor.
The circuit:
* +V connection of the PING))) attached to +5V
* GND connection attached to ground
* SIG connection attached to digital pin 7
http://www.arduino.cc/en/Tutorial/Ping
This example code is in the public domain.
*/
int inches = 0;
int cm = 0;
long readUltrasonicDistance(int triggerPin, int echoPin)
{
pinMode(triggerPin, OUTPUT); // Clear the trigger
digitalWrite(triggerPin, LOW);
delayMicroseconds(2);
// Sets the trigger pin to HIGH state for 10 microseconds
digitalWrite(triggerPin, HIGH);
delayMicroseconds(10);
digitalWrite(triggerPin, LOW);
pinMode(echoPin, INPUT);
// Reads the echo pin, and returns the sound wave travel time in microseconds
return pulseIn(echoPin, HIGH);
}
void setup()
{
Serial.begin(9600);
}
void loop()
{
// measure the ping time in cm
cm = 0.01723 * readUltrasonicDistance(7, 7);
// convert to inches by dividing by 2.54
inches = (cm / 2.54);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.println("cm");
delay(100); // Wait for 100 millisecond(s)
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号