告别MCU+AT:OpenCPU开启嵌入式新纪元(1)
在追求极致响应与低功耗的物联网时代,MCU+AT的通信模式因协议栈割裂、开发繁琐、资源浪费等问题,已难以满足快速迭代的需求。
引言:从“通信外设”到“边缘主机”的时代转折
在物联网的早期阶段,当时的物联网叫做“M2M”通信,蜂窝通信模组通常扮演一个外设的角色,主控MCU负责业务逻辑与外设驱动,而蜂窝模组则像一个调制解调器,被动地等待主控通过AT指令发出命令,执行诸如拨号、发送短信、上传数据等通信任务。
直到今天,这种架构,依然是物联网应用的重要架构。
这样的架构简单、通用,但也意味着一种割裂:通信与控制分属两个世界。
同时,随着通信模组的算力提升,系统资源不断扩展,模组价格不断下降,以及应用需求的爆炸式增长,这种传统架构逐渐暴露出它的瓶颈——稳定性档次上不去,功耗下不来,实时性不够,维护成本高。
同时,模组也可以不只是“被控制的外设”,它是能够成为一个能自己运行逻辑的“主机”的,这就是OpenCPU模式。
MCUA+AT的架构,以及模组OpenCPU的架构,这两种架构已经并行发展了至少20年。
在这20年间,前者一直是主流,后者只有少数公司采用。
但是到了2025年的今天,局面悄然发生了变化,形势开始逆转了。
第一章:MCU+AT架构的工作机制
在了解OpenCPU的优势之前,我们需要先看清楚传统MCU+AT架构到底是如何工作的。 这不仅是对历史的回顾,也是对比的基础。
1.1 基本结构
在MCU+AT模式下,系统通常由两部分组成:
主控MCU:运行用户应用逻辑(传感器采集、控制算法、数据处理)。
蜂窝模组:负责网络连接、协议栈处理(TCP/UDP/MQTT/HTTP等)和底层通信。
二者通常通过UART串口相连,主控通过发送AT指令文本与模组通信。
1.2 典型的通信流程
以传感器数据上传为例,一个MCU+AT架构的执行流程大致如下:
-
MCU从传感器读取数据;
-
MCU通过UART发送AT命令AT+CGATT=1 附着网络;
-
模组返回OK;
-
MCU再发送:AT+CIPSTART="TCP","server",port建立连接;
-
模组建立socket并返回CONNECT OK;
-
MCU发送AT+CIPSEND并传输数据;
-
模组发送确认;
-
MCU等待SEND OK;
-
MCU关闭连接AT+CIPCLOSE;
-
模组断开网络。
每一步都需要MCU等待响应,所以MCU通常会维护一个AT指令的状态机实现业务的完整闭环。
1.3 优点:简单、兼容、可移植
不可否认,MCU+AT模式的成功在于它的低门槛与标准化:
-
硬件分工明确:通信逻辑交给模组,应用逻辑交给MCU;
-
开发门槛低:不需要理解蜂窝协议栈,只要发送命令即可;
-
模块化生态:不同厂家的模组AT命令体系类似,容易替换;
-
风险可控:如果模组异常,MCU可以通过重启模组恢复。
因此在早期的2G/NB-IoT/Cat.1设备中,这种架构的应用极其普遍,无论是POS机,还是智能抄表,还是充电桩,都广泛采用了这种架构。
1.4 隐藏的复杂性:
一个看似简单的世界,实则暗流涌动
然而,这种“看似轻量”的结构,随着应用复杂度增加,很快就暴露出天生的限制:
1)AT指令本质是文本通信
AT命令本是早期拨号调制解调器的遗留产物,本质上是一种字符串解析机制。 当MCU向模组发送命令时,模组必须做如下几个步骤:
-
接收UART数据;
-
解析字符串;
-
匹配命令;
-
执行动作;
-
格式化输出字符串返回结果。
这意味着——每个命令都是一次“解析+应答”的高延迟过程。任何丢包、粘包、解析错误,都会导致通信异常。
2)多线程与异步冲突
MCU往往使用轮询或中断方式等待模组响应。当多任务(如同时上传、下发、OTA、心跳)并行时,AT模式几乎无法保证同步性。
于是会经常出现如下的问题:
“串口乱序、命令丢失、状态机卡死、模组长时间无响应。”
这种情况下,如果把模组重新上电之外,没有其他更好的处理办法。
3)调试困难
AT模式中,问题可能出现在MCU端(命令未发出),也可能出现在模组端(命令未解析),也可能出现在网络端(连接异常)。
而这些错误,在AT的日志上看起来几乎一样:或者是“超时”,或者是“ERROR”。
开发者常常陷入数小时的抓包与串口分析,但是经常难以找到根本原因。
4)功耗管理割裂
蜂窝模组的网络状态(RRC Active / Idle / PSM,心跳包间隔)对功耗影响巨大,但MCU无法直接获知模组当前状态。
因此,MCU很可能会在模组休眠时误发命令,这就可能会造成唤醒模组过于频繁,或者是两个系统的休眠节奏不同步,从而很容易就使得整机的功耗翻倍或者好几倍。
5)升级与维护成本高
MCU与模组是两套固件,版本不一致或接口更新,往往导致几个问题:
-
OTA更新复杂,系统设计的时候,就要分别考虑如何升级 MCU固件与模组固件;
-
调试与维护成本高;
-
不同模组固件版本的兼容性问题比较突出。
1.5 真实案例:一台共享设备的“死锁循环”
以早期的一个案例为例:
某共享充电宝项目,使用STM32+Air724模组(AT模式),运行半年后现场出现“死机率高”的问题。
现场分析发现了如下的问题:
-
MCU周期性发送心跳;
-
若网络拥塞,模组返回延迟;
-
MCU未收到响应,重复发送;
-
模组缓冲区溢出 → 无响应;
-
MCU判断模组异常 → 重启模组;
-
模组重启2分钟未附网;
-
MCU再次重启;
-
整机进入死循环。
问题本质在于:两颗芯片的状态机不同步,而MCU无法感知模组内部状态。
还有一个出现的情况是:
MCU对于模组设置了看门狗机制,超过30秒钟不回复指令,就认为模组死机,从而对模组重新上电。
这种机制,平时是没有问题的,但是在对模组固件进行FOTA升级的时候,在网络信号不好的时候,30秒钟往往还没升级完毕,这时候对模组重新上电,就容易造成模组固件损坏,无法正常工作了。
1.6 结构性矛盾的根源
归根结底,MCU+AT架构存在三个根本性的结构矛盾:
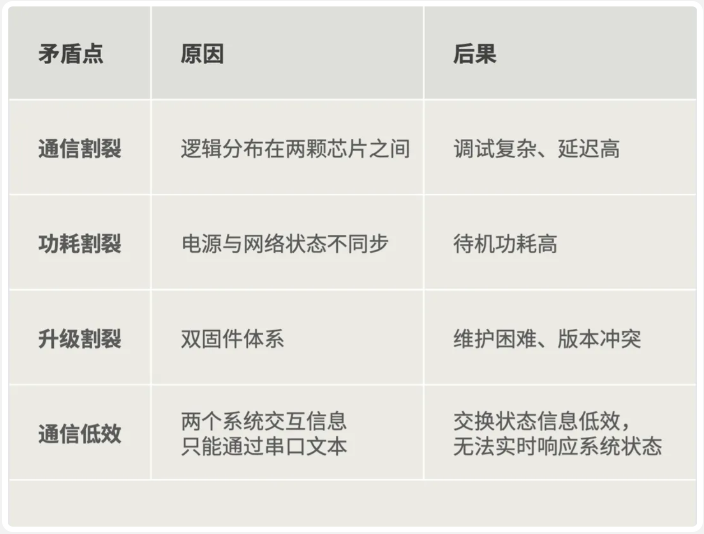
这些问题不是代码层面的,而是架构级问题。 因此,再怎么优化串口驱动、调整命令时序,也只能临时缝补,难以彻底解决问题。
1.7 总结
MCU+AT架构是蜂窝物联网早期最常见的方式,其核心在于通过AT文本命令实现通信控制。该架构的优点是简单、兼容性强、开发门槛低,缺点是通信效率低、功耗不同步、调试困难。
这种架构的根本瓶颈在于系统分层不当:控制与通信被人为分割。
当应用复杂化(并发、多线程、远程升级)时,MCU+AT的固有缺陷就会明显的暴露出来。
所以,MCU+AT的架构注定只能作为过渡方案,而非未来主流架构。
第二章:MCU+AT架构的缺陷详解
在工程实践中,MCU+AT架构的表面简洁掩盖了底层复杂。
许多企业在项目初期选择它,是因为“快”“熟”“有例程”,但当量产并进入运维阶段,问题几乎不可避免地爆发出来。
以下七个层面,是这种架构最核心、最真实的缺陷,每一条都对应着实际项目中最常见的“坑”。
2.1通信层缺陷:串口的“黑洞效应”
在MCU+AT模式中,串口(UART)是唯一的通信桥梁。它既传输命令,又传输数据,还传输状态。
但是,UART是一个非结构化的、异步的、无纠错机制的通道。其设计初衷是“点对点数据流”,而非复杂的多任务交互。
于是出现了三大工程痛点:
1)丢包与粘包
MCU发送命令过快,模组缓冲区满;
模组返回数据太快,MCU接收中断丢字节;
在多线程操作下,极易出现字符串边界错乱。
2)时序依赖
每个命令必须等待前一个命令返回,否则状态机错乱;
网络延迟或服务器响应慢,就可能让系统“卡死”。
3)调试难度高
抓取串口日志往往只看到一串字符串:
AT+CIPSTART="TCP","xxx.xxx.xxx",1883
OK
CONNECT OK
AT+CIPSEND
任何异常都只能靠“猜”,因为底层TCP/IP状态、信号质量、网络重传等,MCU一无所知。
2.2协议层缺陷:命令语言的历史包袱
AT命令最早源自1980年代Hayes Modem的拨号命令集。那时的任务是:拨号、挂断、发送文本。
**今天的物联网设备却要处理如下多种需求: **
-
JSON编解码;
-
MQTT长连接;
-
HTTPS证书;
-
Socket异常恢复;
-
OTA升级;
-
多线程任务。
用一套“命令式字符串协议”去操纵这些复杂任务,带来了几个问题:
命令集庞大(常见超过300条AT);
-
厂家之间不兼容;
-
模组版本变动频繁;
-
命令的解析成本高,
-
系统的可靠性低。
工程上最痛苦的是,不同模组厂家的AT行为细节不同。
即使同一命令AT+CGATT,其返回格式、超时机制、异常码都可能不同。
这让软件的问题分析的难度极大。
2.3功耗层缺陷:两套时钟的错拍
蜂窝通信模组内部有复杂的功耗状态机:
RRC Active → Idle → PSM → Wakeup。
但外部MCU完全看不到这些状态,只能凭时间估计。
于是会出现两种常见的错误:
MCU在模组未唤醒时发送命令,导致超时;
模组刚进入低功耗模式,MCU又触发通信,导致频繁唤醒。
结果会导致系统的总体功耗经常翻倍,使得电池寿命大幅度缩短。
2.4稳定性缺陷:双状态机的异步地狱
MCU有自己的任务状态机,模组内部也有通信状态机。
两者相互独立,没有共享内存或消息队列机制。
这就像两个人隔着电话合作写程序,一个人说一句,另一个人执行一句。
在复杂逻辑下(例如OTA+MQTT+HTTP同时进行),极易出现如下问题:
-
命令重叠;
-
返回混乱;
-
状态丢失;
-
异常重启。
2.5成本缺陷:冗余硬件+冗余软件
MCU+AT架构意味着两套系统:一套MCU系统,一套蜂窝模组系统。
这两套系统,各自需要分别处理电源管理,晶振和时钟,固件升级,内存管理和调试日志。
对于量产企业而言:物料成本至少高出30~50%,PCB占用面积大,测试流程复杂,供应链BOM冗长,加工的良率下降。
更致命的是,软件维护成本提高数倍。
每次升级,都至少需要兼顾如下事宜:
-
同步MCU固件;
-
同步模组固件;
-
测试两者兼容性;
-
重新做OTA测试。
许多企业因此干脆冻结版本,宁可一直使用有缺陷的老固件,也不愿意升级更完善的新固件。
2.6调试与维护缺陷:黑箱中的黑箱
MCU无法直接访问模组内部的协议栈日志;而模组内部的日志格式又与MCU不兼容,无法输出。
这导致开发者调试如同“盲人摸象”:
对于串口通信失败,网络丢包,都缺乏有效的调试手段。
如果是在OpenCPU模式下,开发者可直接调用调试接口打印底层日志,能通过事件触发看到TCP状态。
但在MCU+AT模式下,这一切都是黑箱。
所以MCU+AT架构的调试周期常常是:
1天写逻辑,3天抓日志,5天复现,2周找不到故障的根本原因,调试效率非常低下。
2.7安全与OTA缺陷:双固件的双重隐患
在安全与维护层面,MCU+AT也面临两道难题:
1)双固件升级问题
-
MCU与模组需要分别升级;
-
网络更新失败概率加倍;
-
OTA包大、成本高;
-
一方更新后另一方不兼容,导致整机砖化。
2)安全漏洞难修补
-
MCU与模组分属不同团队;
-
通信链路暴露在UART层;
-
加密/认证逻辑分散;
-
缺乏固件安全机制。
随着大家对安全的要求提高(TLS1.2、证书认证等),这种割裂架构已难以满足要求。
2.8总结:架构性疲劳的不可逆趋势
MCU+AT模式的每一个问题,都可以靠补丁修一阵子,但没有任何一种补丁能根治。
因为根因在于:
它把逻辑拆成了两个物理世界。
通信与控制被强行分离,串口成了“最细的瓶颈”。
在今天这个要求低功耗、高稳定、可OTA的IoT时代,它已不再可持续。
因此,行业开始转向一种新的方式:
让模组不再是被控制的外设,而是具备完整运行能力的计算单元——这就是OpenCPU。
第三章:OpenCPU架构的原理、运行机制与演进逻辑
能否让功能日益强大的通信模组自己承担所有计算与控制任务,从而开启一个更高效,让模组“自己思考”的新时代?
这正是OpenCPU架构所实现的革命性跨越。
3.1从“外设”到“主机”:角色的重定义
要理解OpenCPU的本质,必须先从角色转变谈起。
在MCU+AT模式中,模组只是一个通信外设(Peripheral)。
而在OpenCPU模式下,模组的地位彻底改变——它不再等待指令,而是直接运行应用程序、控制外设、与云端交互。
换句话说:OpenCPU是让蜂窝模组“变成计算机”的过程。
这并非一句营销口号,而是架构级的重生。
模组内部的主控SoC原本就拥有几百MHz的主频、几MB级的 Flash与RAM,有数十个对外开放的IO,支持GPIO、UART、 SPI、IIC、CAN、Camera、LCD等外设。
这些资源完全足以承载一套非常完整的物联网的硬件系统,无需额外的CPU。
3.2 OpenCPU的基本组成
无论是LuatOS、OpenCPU SDK,还是定制平台,它们在结构上都遵循同样的三层逻辑:
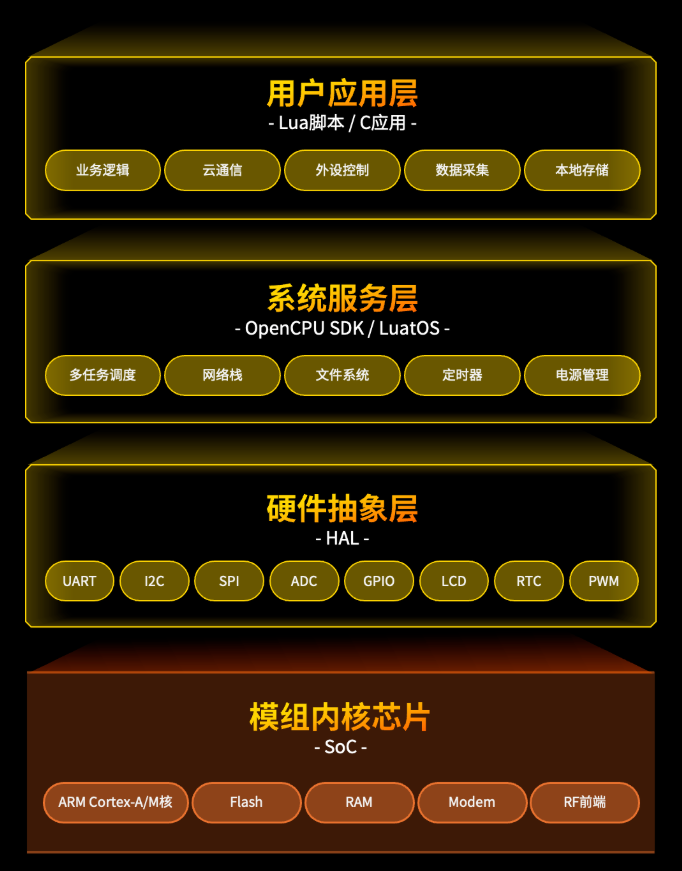
这种结构的关键在于:通信协议栈、操作系统、应用逻辑,在一个封闭而统一的系统中运行。
这让模组可以自主完成从“感知 → 计算 → 通信 → 控制”的全过程。
3.3 OpenCPU的运行机制
以Air8000+LuatOS为例,其内部运行流程如下:
1)系统启动
上电后,bootloader校验固件完整性 → 挂载文件系统 → 启动LuatOS运行。
2)任务调度
LuatOS内核基于事件驱动架构,不同功能模块注册任务:
-
网络连接任务;
-
数据采集任务;
-
定时器;
-
消息订阅和分发(sys.publish / sys.subscribe)。
3)网络栈启动
调用系统API初始化基带、SIM、PDP上下文:
-
可通过netdrv.ready()检查网络状态;
-
支持TCP、UDP、MQTT、HTTP等协议。
4)外设驱动加载
大家可通过Lua或C接口直接控制外设:
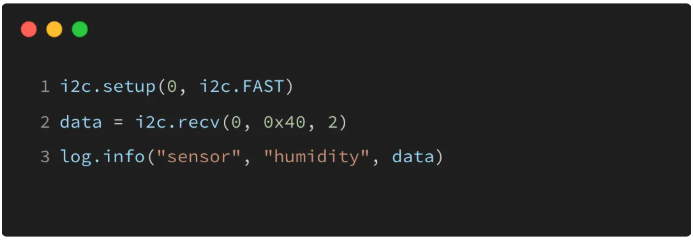
5)业务逻辑执行
脚本周期性采集数据 → 打包 → 上报MQTT;
异常时自动重连或触发看门狗。
6)远程管理与OTA
系统支持FOTA(固件或脚本远程升级);
可通过云端HTTP推送更新包;
OTA过程带CRC校验与分区回滚机制。
3.4关键技术特征
1)事件驱动与异步机制
OpenCPU平台普遍采用事件驱动模型,而非轮询或阻塞式结构。
这意味着:各模块之间通过消息队列通信。
-
网络、定时器、IO 操作均为异步回调;
-
系统可同时处理多个事件。
在LuatOS中,一个典型的事件模型如下:
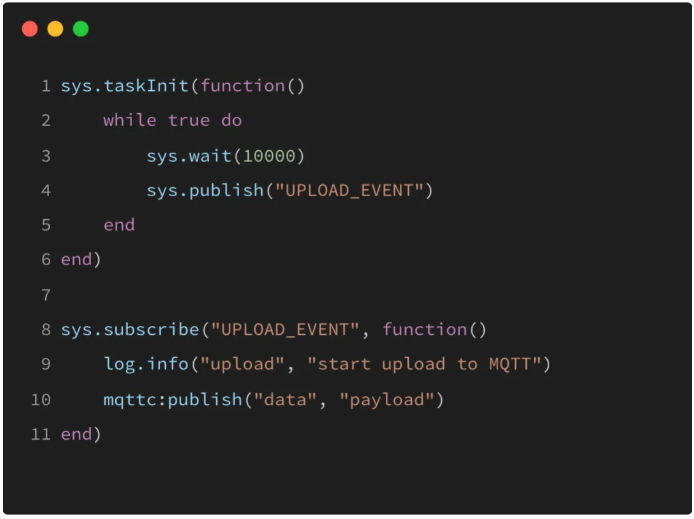
这种机制消除了传统AT架构下的“等待阻塞”,提升并发与响应速度。
2)文件系统与本地存储
OpenCPU模块内置Flash文件系统,可用于:
日志存储;
数据缓存;
OTA分区;
配置文件。
示例(Lua)如下:
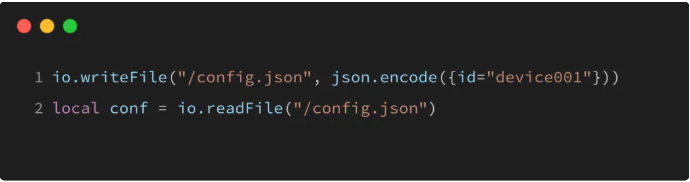
这使模组本身具备“边缘缓存”的能力,可在离线时缓存数据,在线后批量上报。
3)多线程与任务调度
虽然许多模组硬件上是单核,但通过轻量化RTOS(如:LuatOS的协程系统),可实现伪并发的多任务。
系统任务调度器负责管理任务队列、优先级与超时。
相比MCU+AT模式的单线程串口等待,这种模型极大提升系统吞吐量。
4)功耗管理与唤醒控制
OpenCPU可以直接访问底层电源管理单元(PMU),根据网络状态自动进入休眠模式。
开发者可灵活设定休眠条件:
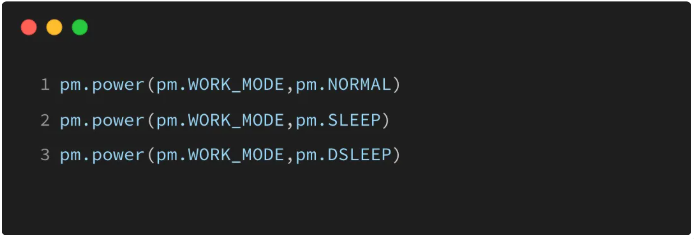
系统内部会协调RRC状态、定时器、外设活动,避免MCU+AT模式的“错拍”问题。
5)安全机制
-
由于所有逻辑运行在模组内部,OpenCPU可以统一实现:
-
TLS/DTLS加密;
-
证书存储;
-
安全启动(Secure Boot);
-
完整性校验(CRC/签名);
-
OTA签名验证。
这让安全从“外围补丁”变成“系统内建”,可以非常方便的提升系统的安全线,更容易符合现代物联网的安全标准。
3.5 OpenCPU的演进逻辑
OpenCPU的出现并非偶然,而是三股趋势共同推动的结果:
1)硬件趋势:算力下沉
随着模组采用更强SoC,算力空余明显;
过去只够跑协议栈,现在足够跑协议栈+应用的组合。
2)软件趋势:RTOS与脚本化成熟
RTOS体积小、调度高效;
Lua、MicroPython 等脚本语言让开发门槛降低。
3)商业趋势:成本与周期压力
市场要求一体化设计、快速迭代、低BOM;
OpenCPU模式正好满足这些需求。
3.6 LuatOS的代表性意义
系统内部会协调RRC状态、定时器、外设活动,避免MCU+AT模式的“错拍”问题。
5)安全机制
-
由于所有逻辑运行在模组内部,OpenCPU可以统一实现:
-
TLS/DTLS加密;
-
证书存储;
-
安全启动(Secure Boot);
-
完整性校验(CRC/签名);
-
OTA签名验证。
这让安全从“外围补丁”变成“系统内建”,可以非常方便的提升系统的安全线,更容易符合现代物联网的安全标准。
3.5 OpenCPU的演进逻辑
OpenCPU的出现并非偶然,而是三股趋势共同推动的结果:
1)硬件趋势:算力下沉
随着模组采用更强SoC,算力空余明显;
过去只够跑协议栈,现在足够跑协议栈+应用的组合。
2)软件趋势:RTOS与脚本化成熟
RTOS体积小、调度高效;
Lua、MicroPython 等脚本语言让开发门槛降低。
3)商业趋势:成本与周期压力
市场要求一体化设计、快速迭代、低BOM;
OpenCPU模式正好满足这些需求。
3.6 LuatOS的代表性意义
我们是国内最早全力推动OpenCPU模式的公司之一,其LuatOS平台在Air系列模组上全面替代传统AT模式。
特征包括:
-
全异步架构:事件驱动、消息分发;
-
脚本化开发:Lua是C的胶水语言,是速度最快的脚本语言,语法简单,可快速上手;
-
API丰富:内置了73个核心库、30多个扩展库,涵盖了HTTP、MQTT、Socket、文件系统、Camera、GNSS、音频、UI、通话、短信、FTP、多网融合等等完善的库;
-
硬件抽象层完备:GPIO、I2C、SPI、ADC、PWM、LCD、Camera、CAN都有成熟的支持库;
-
OTA完整链路:云端推送、分区升级、CRC校验。
一句话概括:LuatOS让模组成为“运行在蜂窝网络上的嵌入式计算机”,而不再是“被串口操控的通信外设”。
3.7 总结
OpenCPU的本质——是把通信模组变为可运行用户逻辑的嵌入式主机。
它通过统一的RTOS+SDK,把通信、控制、低功耗、文件系统、微数据库、UI、视觉功能,整合在一个固件系统;通过事件驱动的异步机制,脚本化开发,让系统更加灵活、实时与稳定;同时解决了系统安全、低功耗、OTA等问题。
LuatOS和Air系列硬件的结合,是OpenCPU模式的代表,并且实现了完整生态,有成熟的开发者社区。
- 未完待续,欢迎探讨 -

 浙公网安备 33010602011771号
浙公网安备 33010602011771号