
齐次方程线性最小二乘的求解
最小二乘问题其形式都为Ax − b = 0,如果问题形式发生改变,变为Ax = 0,那么这样的最小二乘问题应该如何求解呢?
Ax = 0形式的问题经常出现在重建问题(reconstruction)中。我们期望找到方程Ax = 0中 x 不等于零的解。由于该方程的特殊形式我们会发现对于 x 不等于零的解我们乘上任意的尺度因子 k 使解变为 kx 都不会改变最终结果。因为我们可以将问题转化为求解 x 使得||Ax||值最小并且||x||=1。
现在对矩阵 A 进行 SVD 分解有:
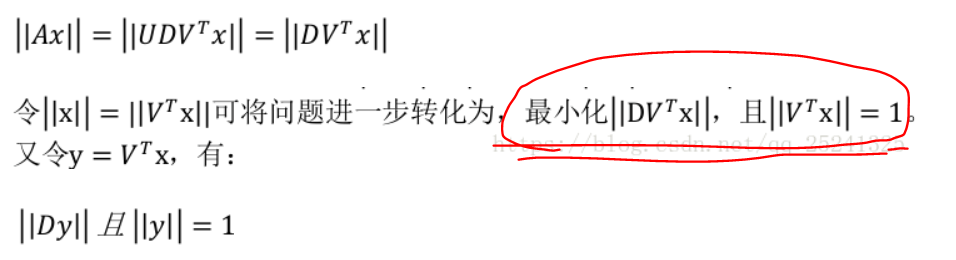
通过 SVD 分解中 D 矩阵的性质我们能够发现,D 为一个对角矩阵,且它的对角线元素呈降序排列。因此方程的解应该为:
该解在最后的位置有一个值为 1 的非零项。依据此结果,再根据方程:
我们可以发现,x 的值就为矩阵 V 的最后一列。
平面拟合的 例子:
int RanSac::PlaneFittingRansac(std::vector<Point>& pointset, FittingPlane& bestplane) { if (pointset.size()<3) { return -1; } std::vector<FittingPlane> fittingPlaneVect; int t = 0, num = 15; //num 为迭代次数 while (t < num) { //步骤1:从数据中随机选择3组数据 std::set<int> threepoints; while (true) { int r = rand() % (pointset.size()); threepoints.insert(r); if (threepoints.size() == 3) break; } PlaneEquation planeParameters; size_t index[3]; int j = 0; for (std::set<int>::iterator iElement = threepoints.begin(); iElement != threepoints.end(); iElement++) { index[j] = *iElement; j++; } //步骤2:从选择3组数据计算平面方程 getPlaneParameters(pointset, index, planeParameters); std::vector<size_t> inside; //步骤3:计算内点个数 for (size_t i = 0; i < pointset.size(); i++) { if (distPointToPlane(pointset[i], planeParameters) < distanThreshold) { inside.push_back(i); } } FittingPlane fittingPlaneTemp; fittingPlaneTemp.insideNum = inside.size(); fittingPlaneTemp.inside = inside; fittingPlaneTemp.planeParameters = planeParameters; fittingPlaneVect.push_back(fittingPlaneTemp); t++; } int insideNumTemp = 0, pos = 0; for (size_t j = 0; j < fittingPlaneVect.size(); j++) { if (insideNumTemp < fittingPlaneVect[j].insideNum) { insideNumTemp = fittingPlaneVect[j].insideNum; pos = j; } else { continue; } } if (insideNumTemp>insideNumThreshold) { bestplane = fittingPlaneVect[pos]; //解最小二乘解问题 Eigen::MatrixXf A(insideNumTemp,4); //(行,列) for (size_t i = 0; i < insideNumTemp; i++) { A(i, 0) = pointset[fittingPlaneVect[pos].inside[i]].x; A(i, 1) = pointset[fittingPlaneVect[pos].inside[i]].y; A(i, 2) = pointset[fittingPlaneVect[pos].inside[i]].z; A(i, 3) = 1; } Eigen::JacobiSVD<Eigen::MatrixXf> svd(A, Eigen::ComputeThinU | Eigen::ComputeThinV); Eigen::MatrixXf V = svd.matrixV(), U = svd.matrixU(); //Eigen::Matrix3f S = U.inverse() * A * V.transpose().inverse(); // S = U^-1 * A * VT * -1 //std::cout << "A :\n" << A << std::endl; //std::cout << "U :\n" << U << std::endl; //std::cout << "S :\n" << S << std::endl; //std::cout << "V :\n" << V << std::endl; bestplane.planeParameters.A = V(0, 3); bestplane.planeParameters.B = V(1, 3); bestplane.planeParameters.C = V(2, 3); bestplane.planeParameters.D = V(3, 3); } //测试SVD分解结果 //std::vector<size_t> insideTemp; //for (size_t i = 0; i < pointset.size(); i++) //{ // if (distPointToPlane(pointset[i], bestplane.planeParameters) < distanThreshold) // { // insideTemp.push_back(i); // } //} return 0; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号