



STM32HAL库通用定时器学后笔记 - 实践
通用定时器简介
1.通用定时器有哪些?
TIM2/TIM3/TIM4/TIM5
2.通用定时器的主要特性
16位递增、递减、中心对齐计数器(计数值0~65535)
16位预分频器(分频系数:1~65535)
可用于触发DAC\ADC
在更新事件、触发事件、输入捕获、输出比较时,会产生中断/DMA请求
4个独立通道,可用于:输入捕获、输出比较、输出PWM、单脉冲模式
使用外部信号控制定时器且可实现多个定时器互连的同步电路
支持编码器和霍尔传感器电路等
***********************通用定时器具备基本定时器所有功能**************************
3.通用定时器框图
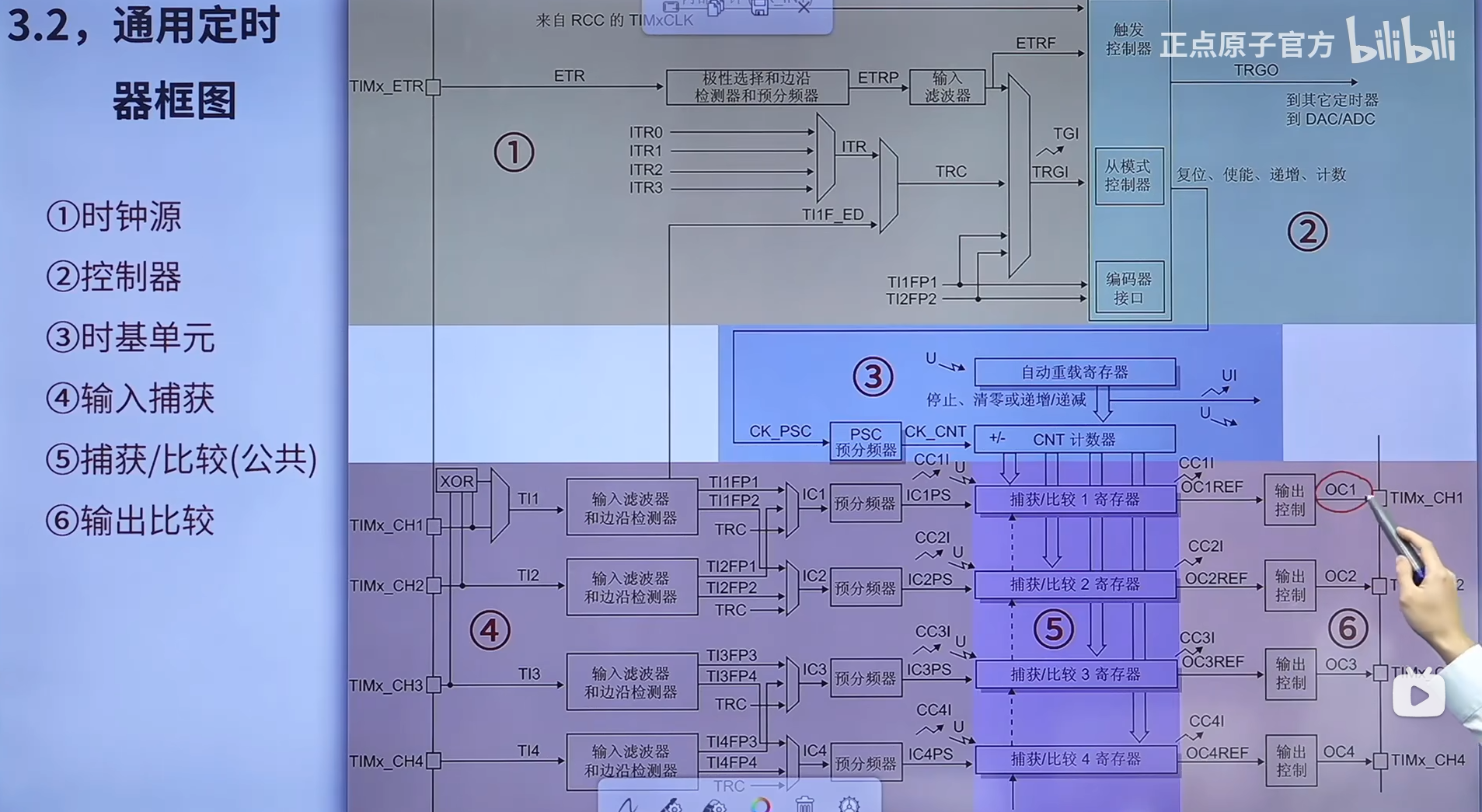
1. 时钟源(Clock Sources)
通用定时器的时钟源有四种选择:
内部时钟(CK_INT):
- 来自APB总线的时钟
- 通用定时器的时钟频率计算:CK_INT = APB1时钟 × 2(当APB1分频系数为2时)
- 例如:系统时钟72MHz,APB1时钟36MHz,APB1分频系数为2,则通用定时器时钟为72MHz
外部时钟模式1:
- 从TIx引脚输入(TIMx_CH1/2/3/4)
- TI1F_ED:来自CH1,未经边沿检测的双边沿信号
- TI1FP1:来自CH1,经边沿检测后的信号(可选择上升沿或下降沿)
- TI2FP2:来自CH2,经边沿检测后的信号
外部时钟模式2:
- 从ETR引脚输入(TIMx_ETR)
- 经过极性选择、边沿检测、预分频器和输入滤波后,可作为外部时钟源
- 用于将定时器作为脉冲计数器
内部触发输入(ITRx):
- 其他定时器的触发输出(TRGO)
- 可用于定时器级联(一个定时器的溢出事件触发另一个定时器的计数)
2. 控制器(Controller)
从模式控制器(Slave Mode Controller):
- 控制计数器复位、启动、递增/递减、计数
- 用于定时器级联功能
触发控制器(Trigger Controller,TRGO):
- 提供触发信号给其他外设
- 可连接到其他定时器的ITR0-ITR3,实现定时器级联
- 为DAC/ADC的触发转换提供信号
编码器接口:
- 用于读取旋转编码器的脉冲和方向信息
- 支持正交编码器模式
3. 时基单元(Time Base Unit)
时基单元是定时器的核心部分,包括:
计数器(Counter):
- 16位计数器,可以向上、向下或中央对齐计数
- 用于计数时钟脉冲
预分频器(Prescaler):
- 用于对输入时钟进行分频
- 预分频系数范围:1~65536
- 有预分频器缓冲器(影子寄存器),防止计数过程中改变分频值导致频率不一致
自动重装载寄存器(Auto Reload Register):
- 设置计数器的上限值
- 当计数器达到自动重装载值时,产生更新事件并重新计数
4. 输入捕获电路(Input Capture Circuit)
输入捕获电路用于测量输入信号的周期和占空比:
输入信号处理:
- 信号经过异或门(电机控制中常用)
- 进入输入滤波器(过滤高频噪声)
- 通过边沿检测器(检测上升沿或下降沿)
捕获比较寄存器:
- 捕获事件发生时,将计数器值转移到捕获比较寄存器
- 用于计算外部信号的时间(如周期、脉宽)
5. 输出比较电路(Output Compare Circuit)
输出比较电路用于生成PWM波形和特定波形:
比较功能:
- 当计数器值等于捕获比较寄存器值时,产生输出事件
- 可设置输出电平翻转、置位或复位
PWM生成:
1.通过设置占空比和频率,生成PWM信号
2.用于LED调光、电机控制等
3.计数器时钟源
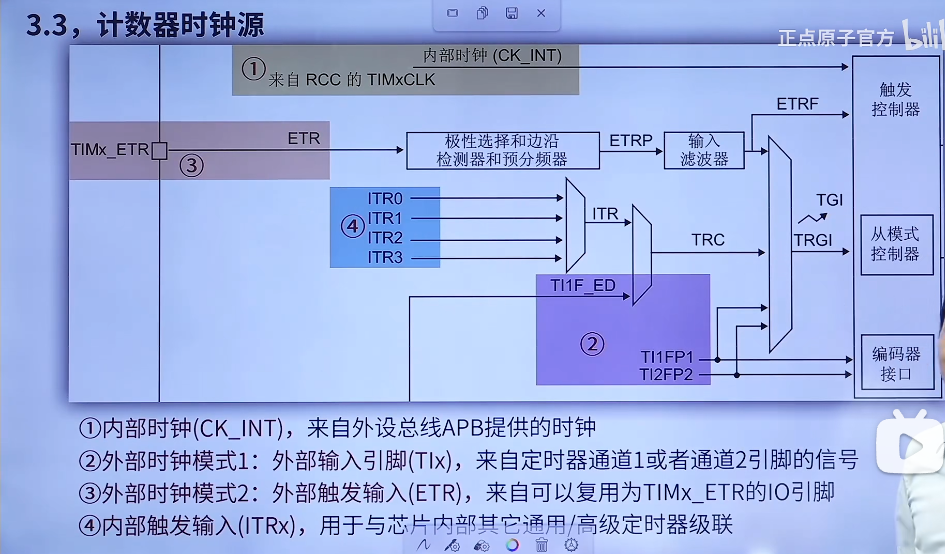
内部时钟(CK_INT) 设置TIMx_SMCR的SMS=000
外部时钟模式1:外部输入引脚(TIX) 设置TIMx_SMCR的SMS=111
外部时钟模式2:外部触发输入(ETR) 设置TIMx_SMCR的SMS=111
内部触发输入(ITRx) 比较复杂,设置需要看参考手册
外部时钟模式1 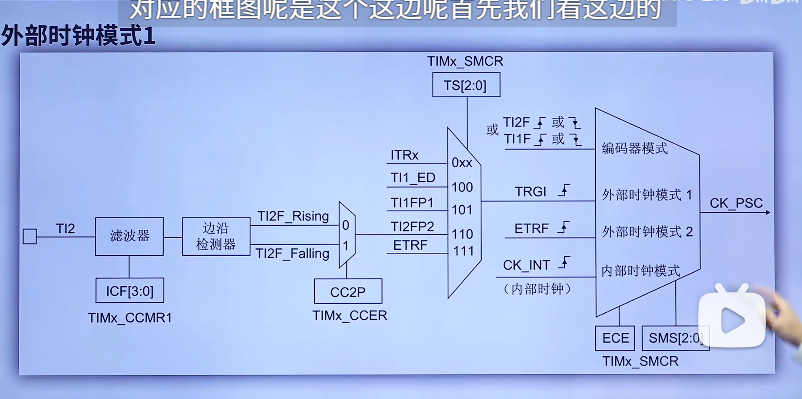
处理路径:
[外部时钟信号] → [IO引脚] → [TIMx_CH1/CH2] → [输入捕获滤波器] → [边沿检测器] → [触发输入选择器] → [模式选择器] → [预分频器] → [计数器]#include "./BSP/TIMER/gtim.h"
#include "./BSP/LED/led.h"
TIM_HandleTypeDef g_timx_handle; /* 定时器x句柄 */
void gtim_timx_int_init(uint16_t arr, uint16_t psc)
{
GTIM_TIMX_INT_CLK_ENABLE(); /* 使能TIMx时钟 */
g_timx_handle.Instance = GTIM_TIMX_INT; /* 通用定时器x */
g_timx_handle.Init.Prescaler = psc; /* 预分频系数 */
g_timx_handle.Init.CounterMode = TIM_COUNTERMODE_UP; /* 递增计数模式 */
g_timx_handle.Init.Period = arr; /* 自动装载值 */
HAL_TIM_Base_Init(&g_timx_handle);
HAL_NVIC_SetPriority(GTIM_TIMX_INT_IRQn, 1, 3); /* 设置中断优先级,抢占优先级1,子优先级3 */
HAL_NVIC_EnableIRQ(GTIM_TIMX_INT_IRQn); /* 开启ITMx中断 */
HAL_TIM_Base_Start_IT(&g_timx_handle); /* 使能定时器x和定时器x更新中断 */
}
void GTIM_TIMX_INT_IRQHandler(void)
{
/* 以下代码没有使用定时器HAL库共用处理函数来处理,而是直接通过判断中断标志位的方式 */
if(__HAL_TIM_GET_FLAG(&g_timx_handle, TIM_FLAG_UPDATE) != RESET)
{
LED1_TOGGLE();
__HAL_TIM_CLEAR_IT(&g_timx_handle, TIM_IT_UPDATE); /* 清除定时器溢出中断标志位 */
}
}通用定时器PWM输出实验
捕获/比较通道的输出部分(通道1)
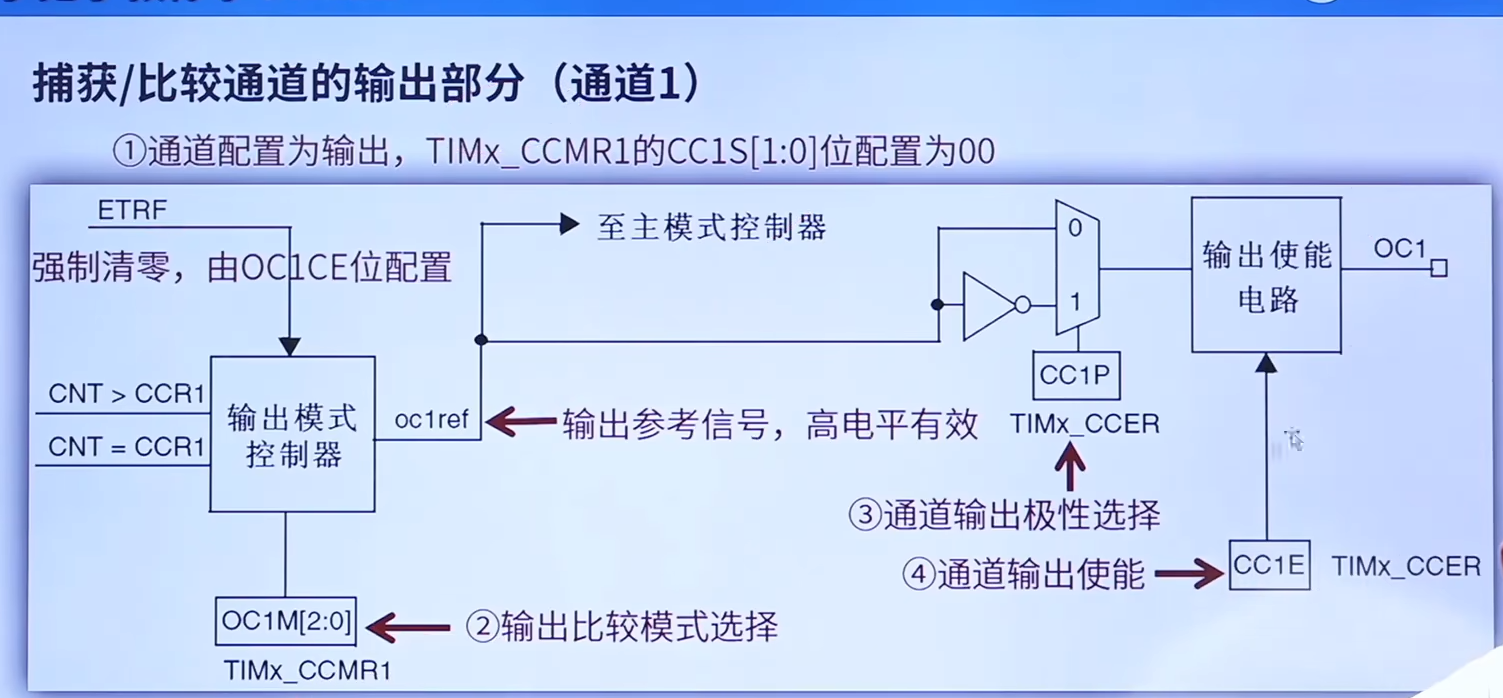
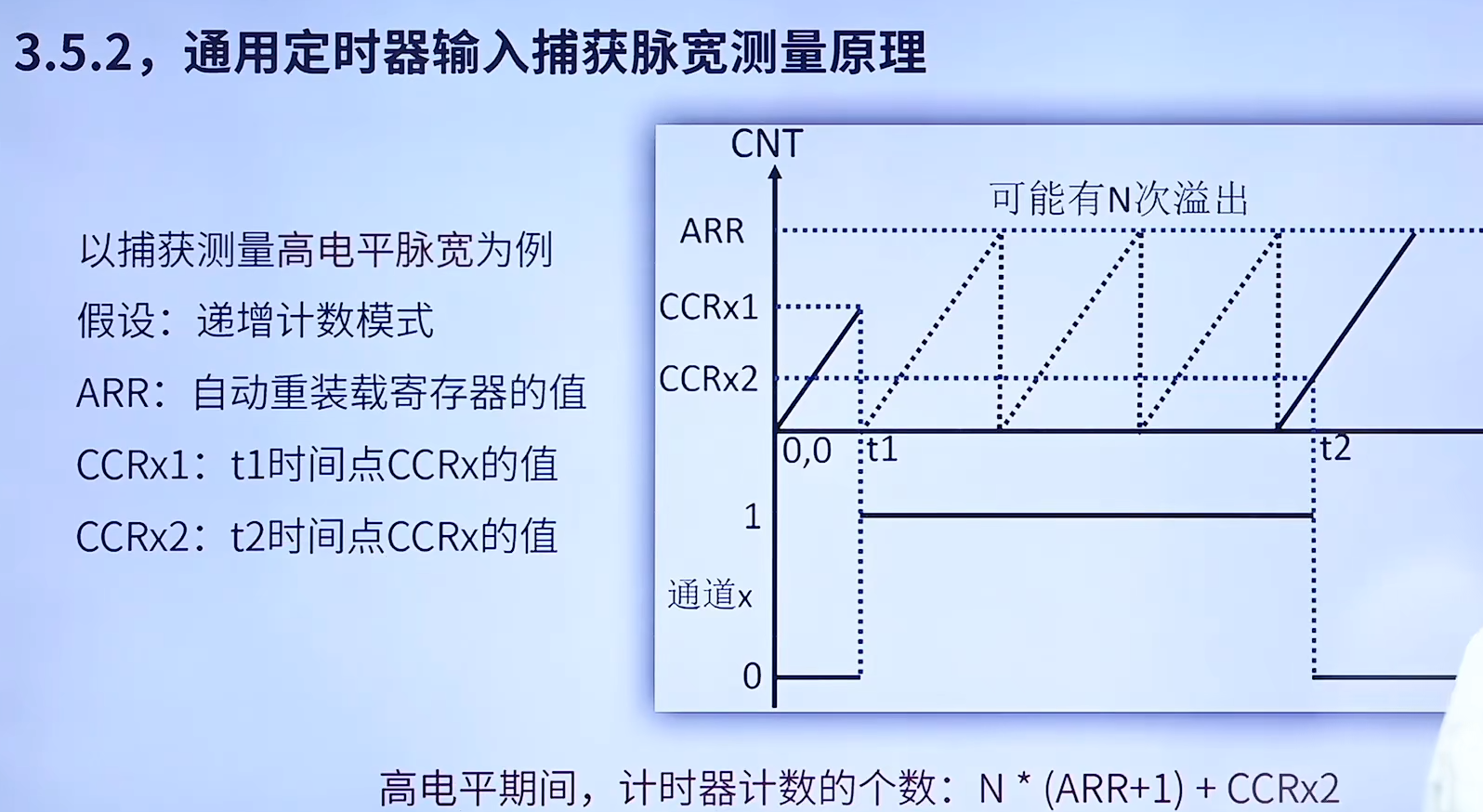
通用定时器输出PWM原理
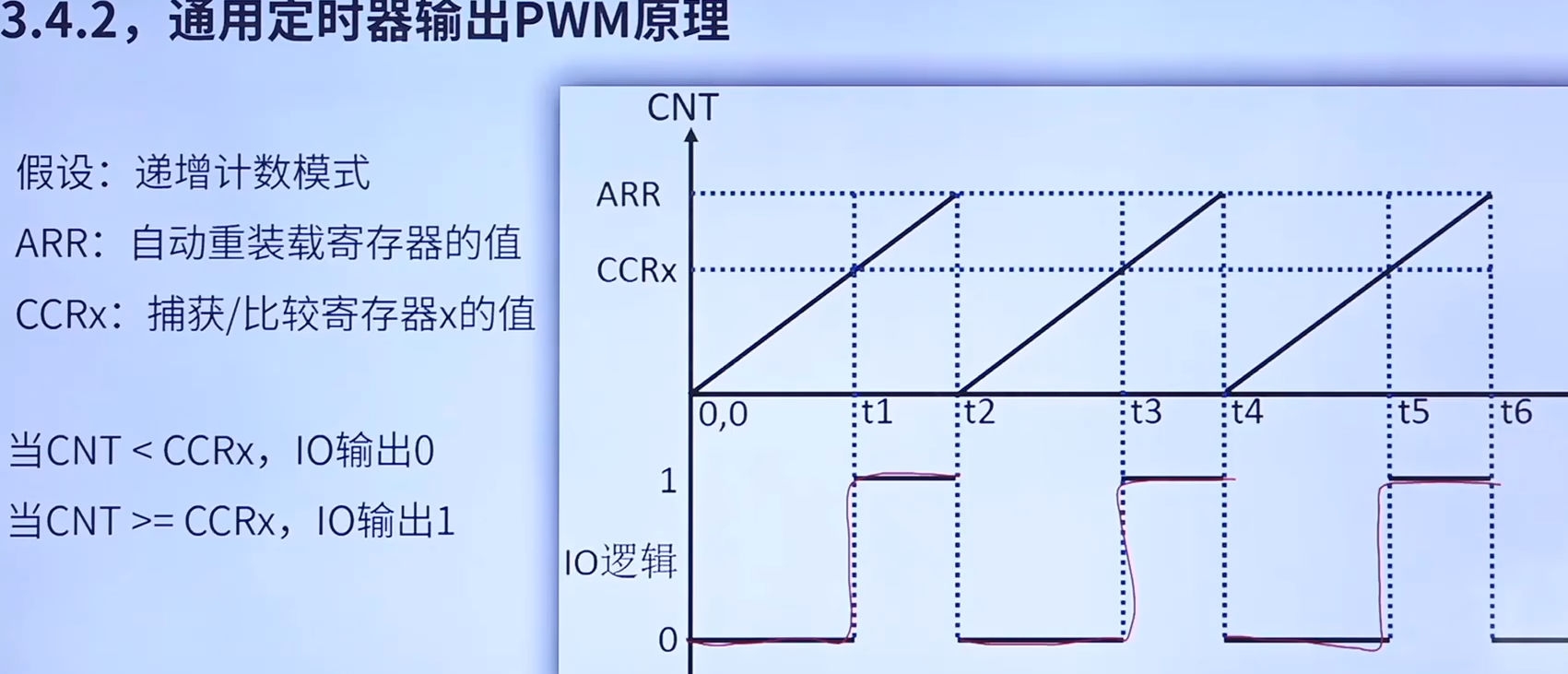
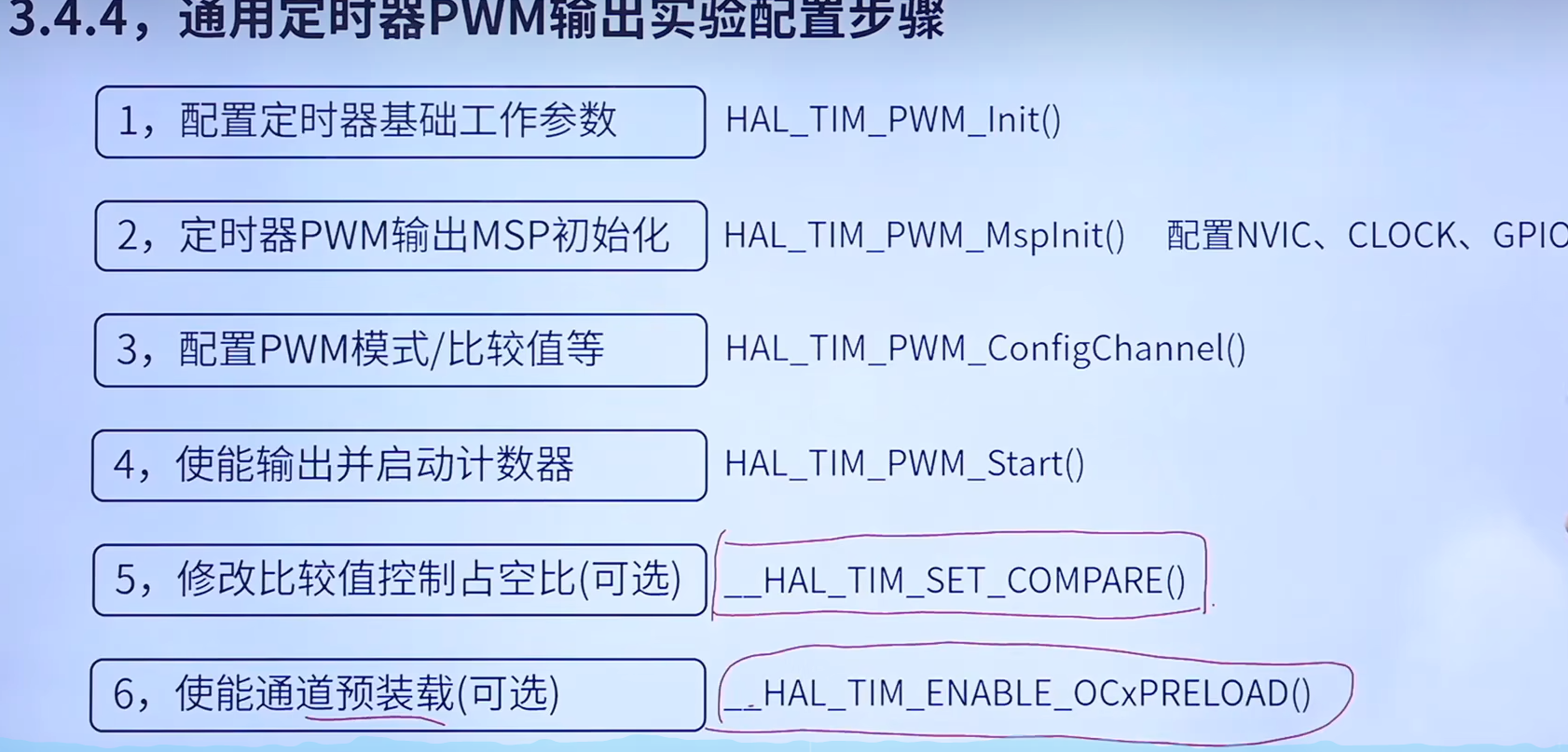
通用定时器PWM输出实验配置步骤
**相关HAL库函数介绍
HAL_TIM_PWM_Init() CR1\ARR\PSC 初始化定时器基础参数
HAL_TIM_PWM_MspInit() 无 存放NVIC\CLOCK\GPIO初始化代码
HAL_TIM_PWM_ConfigChannel() CCMRx\CCRx\CCER 配置PWM模式、比较值、输出极性
HAL_TIM_PWM_Start() CCER\CR1 使能输出比较并启动计数器
__HAL_TIM_SET_COMPARE() CCRx 修改比较值
__HAL_TIM_ENABLE_OCxPRELOAD() CCER 使能通道预装载
TIM_OC_InitTypeDef结构体
typedef struct
{
uint32_t OCMode; /*输出比较模式选择*/ 8种
uint32_t Pulse; /*设置比较值*/ CCRx
uint32_t OCPolarity; /*设置输出比较值*/ CCxP
uint32_t OCNPolarity; /*设置互补输出比较性*/ *高级定时器,通用定时器没有
uint32_t OCFastMode; /*使能或失能输出比较快速模式*/
uint32_t OCIdleState; /*空闲状态下OC1输出*/
uint32_t OCNIdleState; /*空闲状态下OC1N输出*/
} TIM_OC_InitTypeDef;
HAL_TIM_PWM_Start()函数
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
TIM_HandleTypeDef *htim(句柄) uint32_t Channel(通道)
该函数的核心只有两行
TIM_CCxChannelCmd(htim->Instance, Channel, TIM_CCx_ENABLE);
使能定时器的指定捕获/比较通道(例如通道1、2、3或4),使该通道能够输出PWM信号或进行比较操作。
htim->Instance:定时器的外设指针(如TIM2、TIM3等)Channel:通道编号(TIM_CHANNEL_1、TIM_CHANNEL_2等)TIM_CCx_ENABLE:使能通道的标志(使能状态)
这个函数会执行以下操作:
- 验证定时器是否支持比较输出(通过
IS_TIM_CC1_INSTANCE检查) - 验证通道号是否合法(通过
IS_TIM_CHANNELS检查) - 计算位掩码(如通道1的掩码是
TIM_CCER_CC1E << 0) - 先清零对应通道的CCxE位(确保通道先被关闭)
- 根据
TIM_CCx_ENABLE设置新状态(将CCxE位设置为1)
作用
- 使能指定通道的输出,使该通道的引脚能够输出PWM信号
- CCxE = 1:引脚输出PWM/OC信号(启动PWM、单脉冲输出)
- CCxE = 0:引脚变为高阻态或静态电平(紧急关闭电机驱动)
__HAL_TIM_ENABLE(htim);
功能
使能定时器,启动定时器计数。
详细解析
__HAL_TIM_ENABLE(htim):使能定时器的宏- 实际操作:
((__HANDLE__)->Instance->CR1|=(TIM_CR1_CEN)) - 这个宏将定时器的CR1寄存器的第0位(CEN位)设置为1
作用
- 启动定时器计数
- 使定时器开始按照配置的时钟频率计数
- 与
TIM_CCxChannelCmd配合使用,确保定时器在通道使能后开始工作
两行代码的执行顺序和目的
这两行代码通常按此顺序执行,目的是:
- 先配置好定时器通道(使能通道)
- 再使能定时器(启动计数)
这样,当定时器开始计数后,当计数器值与比较寄存器匹配时,就会在指定通道上产生PWM输出或比较事件。
为什么需要这个顺序?
如果先使能定时器再使能通道,可能会导致在通道还未使能时,定时器已经开始了计数,从而产生意外的输出。先使能通道再使能定时器可以确保定时器启动时,通道已经处于正确的配置状态。
__HAL_TIM_SET_COMPARE()函数
#define __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) :\
((__HANDLE__)->Instance->CCR4 = (__COMPARE__)))
该函数整体为宏,使用了C语言的三元条件运算符(?:)实现多路选择,根据通道号(__CHANNEL__)选择对应的CCR寄存器进行赋值。
1. 通道1处理
((__CHANNEL__) == TIM_CHANNEL_1) ?
((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) : ...- 如果通道号等于
TIM_CHANNEL_1(通道1) - 则将比较值
(__COMPARE__)写入(__HANDLE__)->Instance->CCR1(通道1的捕获/比较寄存器)
2. 通道2处理
((__CHANNEL__) == TIM_CHANNEL_2) ?
((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) : ...- 如果通道号等于
TIM_CHANNEL_2(通道2) - 则将比较值
(__COMPARE__)写入(__HANDLE__)->Instance->CCR2(通道2的捕获/比较寄存器)
3. 通道3处理
((__CHANNEL__) == TIM_CHANNEL_3) ?
((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) : ...- 如果通道号等于
TIM_CHANNEL_3(通道3) - 则将比较值
(__COMPARE__)写入(__HANDLE__)->Instance->CCR3(通道3的捕获/比较寄存器)
4. 通道4处理(默认情况)
((__HANDLE__)->Instance->CCR4 = (__COMPARE__))- 如果以上三个条件都不满足(即通道号不是1、2或3)
- 则将比较值
(__COMPARE__)写入(__HANDLE__)->Instance->CCR4(通道4的捕获/比较寄存器)
原理
定时器CCR寄存器的作用
- CCR(Capture/Compare Register)是定时器的捕获/比较寄存器
- 在PWM模式下,CCR值决定PWM的占空比
- 例如:如果ARR=1000,CCR=500,则占空比=500/1000=50%
重要注意事项
通道有效性:
- 通用定时器(TIM2-TIM5)有4个通道(CH1-CH4)
- 高级定时器(TIM1、TIM8)有6个通道(CH1-CH4和CH1N-CH3N)
- 对于高级定时器的互补通道,应使用
__HAL_TIM_SET_COMPARE_N宏
使用顺序:
- 必须在
__HAL_TIM_ENABLE(使能定时器)之前设置CCR值 - 如果先使能定时器再设置CCR,可能会导致PWM输出不稳定
- 必须在
与HAL库函数的关系:
- 在
HAL_TIM_PWM_Start等高级函数中,会自动调用这个宏 - 例如:
HAL_TIM_PWM_Start内部会调用__HAL_TIM_SET_COMPARE设置CCR值
- 在
__HAL_TIM_ENABLE_OCxPRELOAD()函数
#define __HAL_TIM_ENABLE_OCxPRELOAD(__HANDLE__, __CHANNEL__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCMR1 |= TIM_CCMR1_OC1PE) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCMR1 |= TIM_CCMR1_OC2PE) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCMR2 |= TIM_CCMR2_OC3PE) :\
((__HANDLE__)->Instance->CCMR2 |= TIM_CCMR2_OC4PE))
该宏的作用是:使能指定定时器通道的输出比较预装载功能(Output Compare Preload Enable)。
为什么需要预装载功能?
问题场景
假设我们正在输出PWM,当前CCR值为500,ARR=1000(50%占空比)。如果我们在计数过程中(比如CNT=300)直接将CCR改为600,会导致:
- 当前周期的PWM占空比突然从50%变为60%
- 产生输出毛刺(不期望的波形突变)
预装载解决方案
- 先将新值(600)写入预装载寄存器
- 当计数器达到ARR值(1000)时,触发更新事件
- 更新事件发生时,预装载寄存器的值(600)被复制到实际CCR寄存器
- 下一个周期开始时,PWM占空比变为60%
这样保证了PWM输出的平滑过渡,避免了输出毛刺。
重要注意事项
必须在设置CCR之前使能预装载:
// 错误顺序:会导致立即生效,可能产生毛刺 __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 600); __HAL_TIM_ENABLE_OCxPRELOAD(&htim2, TIM_CHANNEL_1); // 晚了!CCR已生效预装载与更新事件:
- 预装载功能只在更新事件(Update Event)发生时生效
- 更新事件由计数器达到ARR值触发(在向上计数模式下)
与HAL库函数的关系:
HAL_TIM_PWM_Start内部已经包含了使能预装载和设置CCR的操作- 通常不需要手动调用这个宏,除非需要在启动PWM前动态设置CCR
为什么这个宏如此重要?
在PWM应用中,预装载功能是保证输出质量的关键:
- 消除PWM波形中的毛刺
- 实现平滑的占空比调整
- 避免电机驱动等应用中的电流冲击
- 保证控制系统的稳定性
与知识库的关联
- 这个宏直接关联到定时器的"捕获/比较寄存器"部分
- 是实现稳定PWM输出的核心机制
- 与之前讨论的
__HAL_TIM_SET_COMPARE和__HAL_TIM_ENABLE共同构成完整的PWM配置流程
总结
__HAL_TIM_ENABLE_OCxPRELOAD宏的作用是使能定时器通道的输出比较预装载功能,它通过设置CCMR寄存器的对应位来实现。这个功能确保了PWM占空比的改变在下一个周期开始时生效,而不是在当前周期中突然改变,从而避免了输出波形的毛刺,是实现高质量PWM输出的必要步骤。
在STM32的PWM应用中,这个宏的正确使用对于系统的稳定性和性能至关重要。理解这个宏的工作原理,有助于开发者编写更健壮、更高质量的PWM控制代码。
捕获/比较通道的输入部分
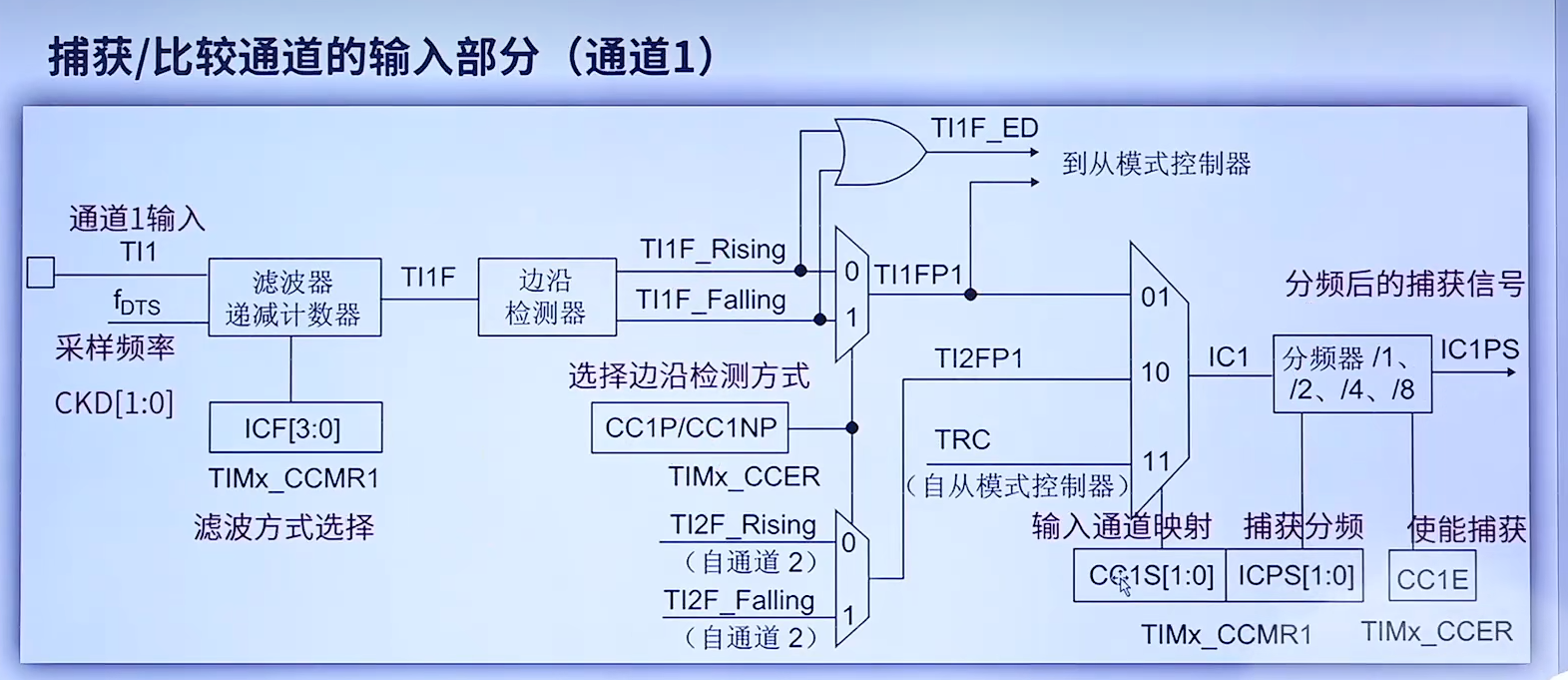
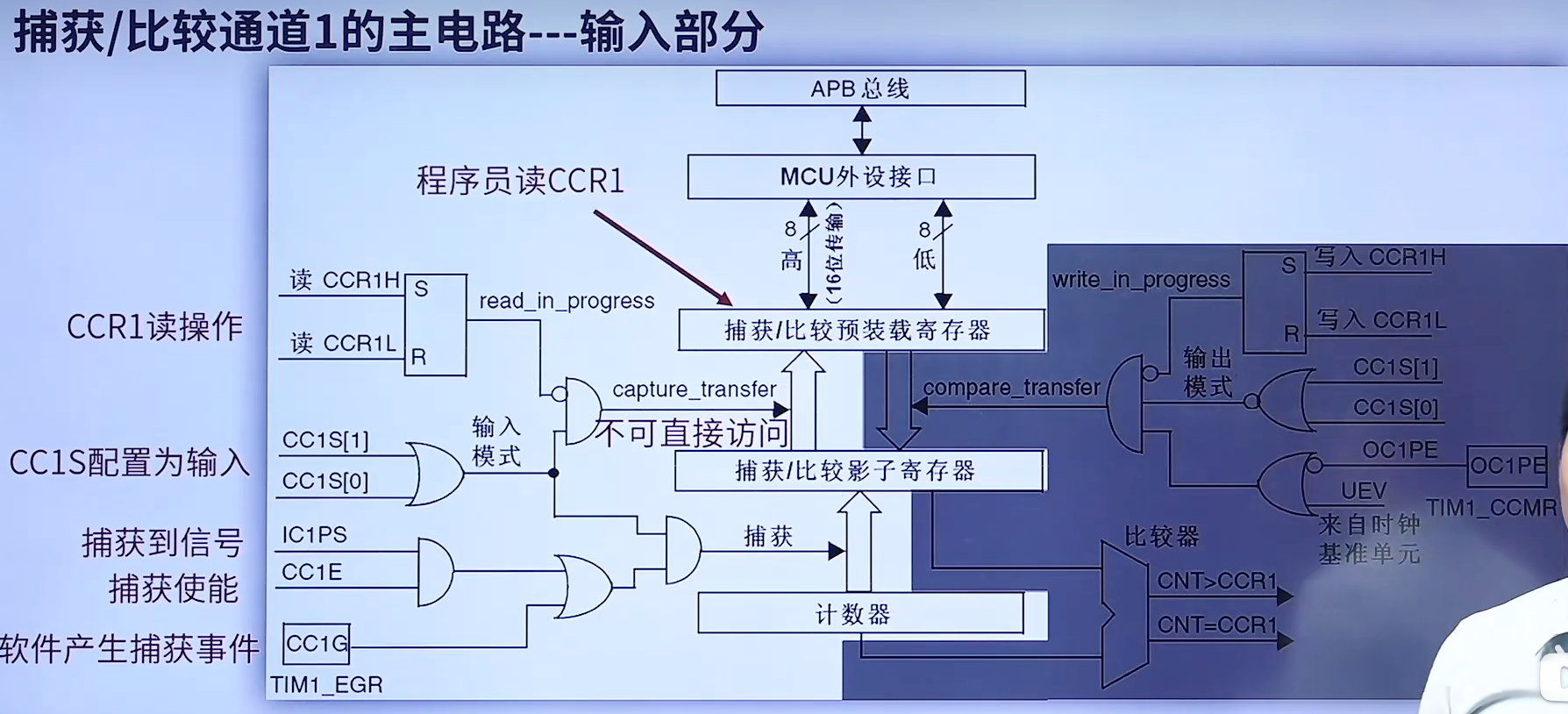
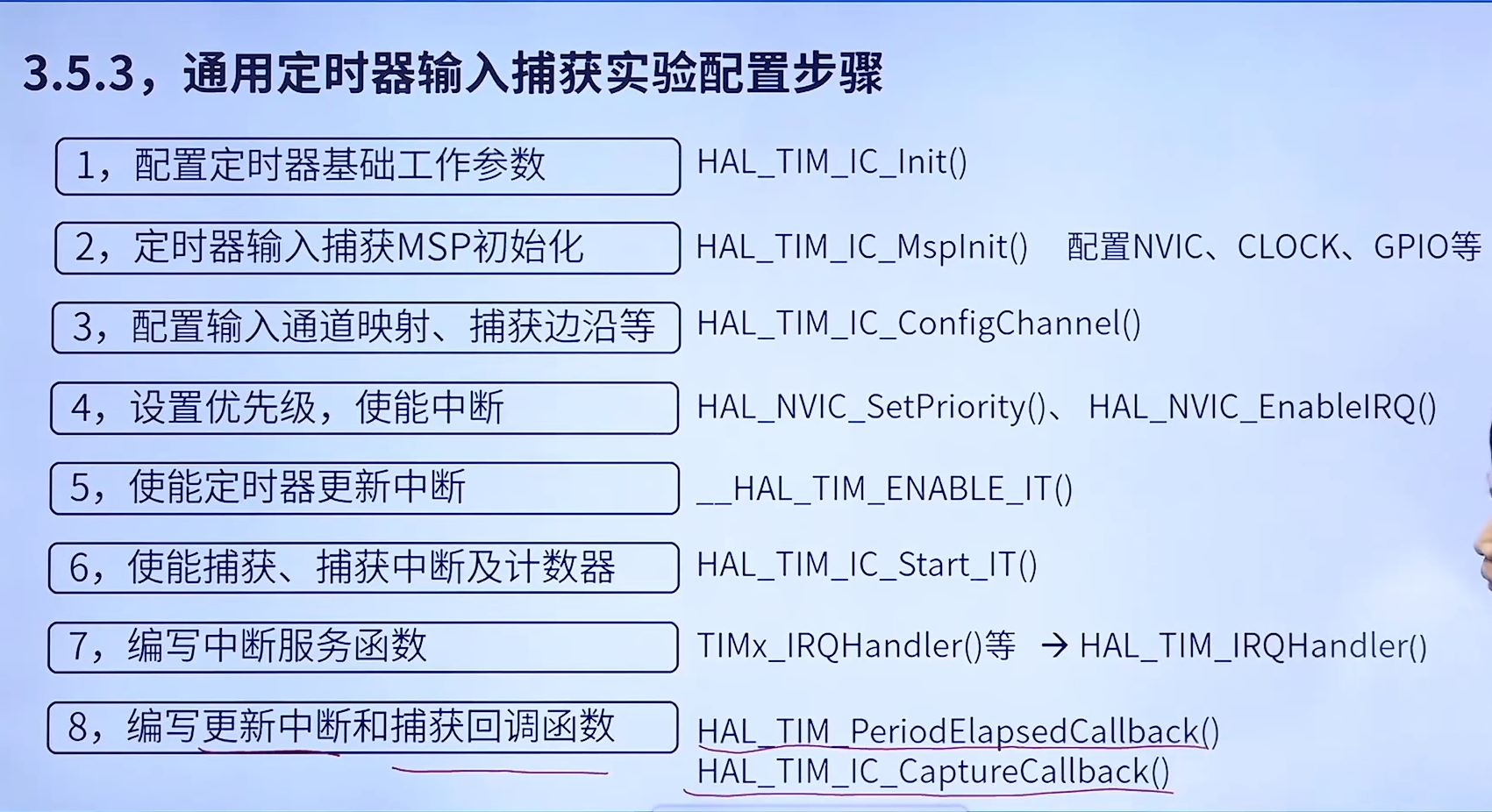
通用定时器输入捕获实验配置步骤
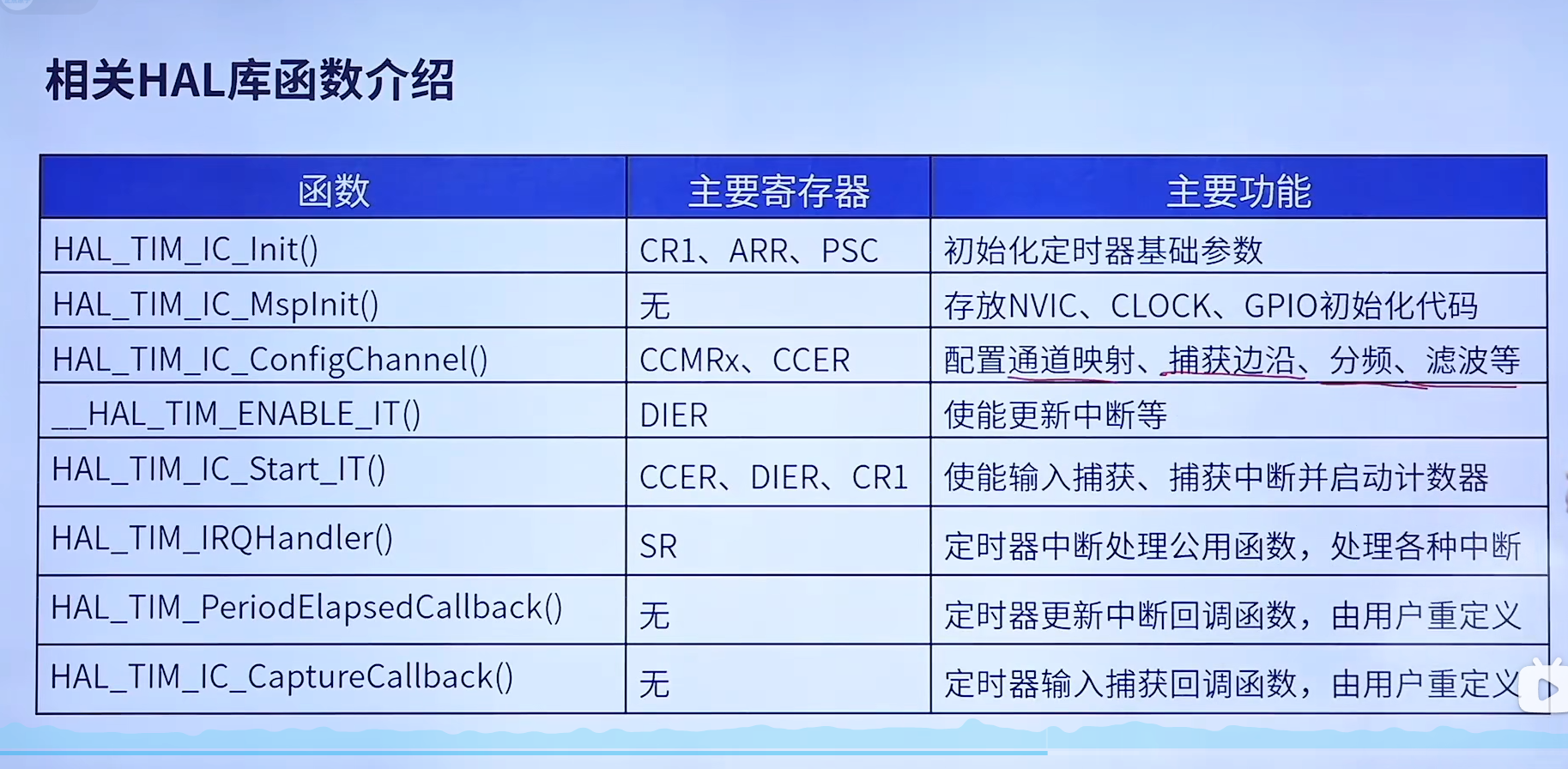
相关HAL库函数介绍
TIM_IC_InitTypeDef结构体
typedef struct
{
uint32_t ICPolarity; /*输入捕获触发方式选择,比如上升、下降捕获*/
uint32_t ICSelection; /*输入捕获选择,用于设置映射关系*/
uint32_t ICPrescaler; /*输入捕获分频系数*/
uint32_t ICFilter; /*输入捕获滤波器设置*/
} TIM_IC_InitTypeDef;

 浙公网安备 33010602011771号
浙公网安备 33010602011771号