

浅谈PNP的BA求解
注:这是我在知乎写的文章,现搬运至此。原文链接:https://zhuanlan.zhihu.com/p/51363371
本文实现的是两帧间pnp问题的BA求解。为了实现GPU上的BA,对BA过程的透彻理解必不可少,而两帧间BA优化正是大规模后端优化的基础.为方便期间,本文求解使用高斯牛顿法。需要额外指出的是,本文并未利H矩阵的稀疏性,直接使用Eigen自带的最小二乘求解。
本代码编写于2018年,如有疏漏,欢迎批评指正。本文代码地址:https://link.zhihu.com/?target=https%3A//github.com/LiuSQ123/pnp_by_BA
0.PNP和BA简介
PNP(perspective-n-point)是通过一组匹配好的3D点和2D点来求解两帧图像之间运动的一种算法。PNP的求解有DLT(直接线性变换)、P3P、EPNP和BA优化等方式。而BA优化是SLAM中的最核心算法,通过BA求解PNP和SLAM系统后端优化中的BA原理相同。其差别只在于,PNP问题仅仅包含两帧图像的位姿,而后端中的BA优化则包含多个图像的位姿。
BA(bundle adjustment)指的是同时调整相机姿态和特征点位置,以便从每个特征点反射出的光线(bundles of light rays),通过调整(adjustment)最后都能通过相机光心。故也有人翻译为光束平差法。BA通常构建为一个最小二乘问题,通过使重投影误差最小化来同时调整相机的位姿和特征点的坐标。
首先解释什么是重投影误差?分为两步来解释:
1.重投影: 重投影顾名思义就是把 3d空间中的点重新投影到图像平面上。用数学公式表达就是相机的成像过程,即:
其中, 表示相机的成像过程,
为相机在世界坐标系下的位姿(李代数表示),
为3d点在世界坐标系下的坐标,
为该3d点在图像上像素坐标的理论值。一般情况下,姿态
和点坐标
都为优化变量(优化变量的意思是,在优化开始前我们对
的值只有一个猜测值,而我们要求的正是它们的准确值)。当然,你也可以只优化
或者
,甚至你还可以只优化位姿中的旋转
而固定位移
,这一点会在下文中说明。
2.误差:上面说到, 和
都为优化变量,在BA开始之前我们对它无从知晓(正如上文所说,我们对优化变量只有一个猜测值,一般是根据先验或者传感器直接测量取得。值得一提的是,针对于BA求解PNP问题,这个初值并不能随便给定,否则可能会陷入局部极小。而在已知匹配的ICP问题中,初始值可以任意给定,算法总会收敛到全局极小)。那么对应到重投影的公式,再加上噪声和传感器误差的影响,我们根据公式(1)求得的3d点理论像素坐标和我们的观测到的像素坐标必然不同,而这个理论值和观测值的差就是重投影误差,我们定义重投影误差为 :
其中, 为观测值(即相机图像上特征点的像素坐标),
为理论值(或者说是我们的预测值)。针对于
我们可以构建最小二乘问题,通过调整
来使重投影误差的平方和(因为误差有正有负,所以取平方) 最小化。我们需要做的就是求解出误差平方和的梯度,然后按梯度下降方向迭代,直至收敛。BA优化的原理就是这么简单!
1.求解BA
求解最小二乘问题有很多种方式(我相信大家都知道!不知道的请翻十四讲p109),如一阶和二阶梯度下降法,G-N法,L-M法,狗腿(DogLeg)法等。其中G-N法虽然有很多缺点,例如使用 近似的
矩阵只能保持半正定性,以及由此带来的算法不稳定,但是其编程实现简单,且优于一,二阶梯度法,故本文使用G-N法求解BA。
1.1 问题简介
我们把第一帧固定,设定为世界坐标系原点(即该帧相机的旋转为单位矩阵 ,位移
),同时优化3D点的空间位置和第二帧的姿态。针对于两帧之间的BA,我们要求解目标函数:
其中, 为我们优化位姿的李代数表示(因为我们要求解的是两帧之间的PNP问题,并且我们固定了第一帧的姿态,所以只有一个
无下标),
为第一帧和第二帧共同观测到的特征点坐标,我们假设在两帧图片上共匹配了
个特征点。
使用李代数 (3)表示姿态的原因是,只有单位正交阵才能表示旋转,如果使用 矩阵
,那么就会构建出一个带有约束的优化问题。而通过李群-李代数的转换关系,正好可以把BA构建成无约束优化,简化求解。
我们再设定待估计的状态向量为:
其中 为李代数表示的相机位姿 ,
为两帧间匹配的3D点坐标,一共m个。我们记单个误差项为(注意和上文的
进行区分,
为
的平方,原因可参考<14讲>高斯牛顿法):
可以看出来,一个特征点每被观测一次,会产生一个这样的2维误差。我们再记整体误差为 ,那么
的表达式就为:
因为每个 都是二维的,故
为2*m维的向量,请牢记
的大小,下文中我们还会用到。这样,我们整体的目标函数可以写成:
对应到代码中就是:
1 /*** 2 * @param x 状态量 3 * @param v_Point2D 观测到特征点的像素坐标 4 * @return f(x) 5 */ 6 Eigen::Matrix<double ,Eigen::Dynamic,1> 7 findCostFunction(Eigen::MatrixXd x, std::vector<cv::Point2d> v_Point2D) 8 { 9 //e=u-K*T*P; u为图像上的观测坐标,K为相机内参,T为相机外参,P为3D点坐标; 10 double fx=camMatrix(0,0); 11 double fy=camMatrix(1,1); 12 double cx=camMatrix(0,2); 13 double cy=camMatrix(1,2); 14 Eigen::Matrix<double ,Eigen::Dynamic,1> ans; 15 16 int size_P=(int)(x.rows()-6)/3; 17 18 if(size_P!=v_Point2D.size()){ 19 std::cout<<"---ERROR---"<<endl; 20 return ans; 21 } 22 //把李代数转化为矩阵 Pose为变换矩阵 23 Eigen::VectorXd v_temp(6); 24 v_temp=x.block(0,0,6,1); 25 Sophus::SE3 SE3_temp=Sophus::SE3::exp(v_temp); 26 Eigen::Matrix<double,4,4> Pose = SE3_temp.matrix(); 27 28 ans.resize(2*size_P,1); 29 ans.setZero(); 30 for(int i=0;i<size_P;i++){ 31 Eigen::Matrix<double ,4,1> Point; 32 Point(0,0)=x(6+i*3 ,0); 33 Point(1,0)=x(1+6+i*3,0); 34 Point(2,0)=x(2+6+i*3,0); 35 Point(3,0)=1.0; 36 //计算3D点在相机坐标系下的坐标 37 Eigen::Matrix<double ,4,1> cam_Point=Pose*Point; 38 double cam_x=cam_Point(0,0); //相机坐标喜下3D点的坐标 39 double cam_y=cam_Point(1,0); 40 double cam_z=cam_Point(2,0); 41 //计算e 42 ans(2*i, 0) =v_Point2D[i].x-((fx*cam_x)/cam_z)-cx; 43 ans(2*i+1,0) =v_Point2D[i].y-((fy*cam_y)/cam_z)-cy; 44 } 45 return ans; 46 }
1.2 G-N法
本文不再对G-N法做详细的阐释,请仔细阅读 <十四讲>第六章。也可参考<状态估计>4.3.1,同时<状态估计>p217-p219也阐述了G-N法的另外一种解释。
无论使用什么方式求解最小二乘问题,归根结底都要面对增量方程:
在G-N法中,增量方程具体表示为:
其中
要想迭代,首先需要求解出 的值,即每个优化变量的增量。可以看出来,无论
和
如何取值,增量方程的求解都是一个线性方程组问题。大家都知道,在SLAM系统里,增量方程中的
矩阵是一个稀疏矩阵,对其求解有着多种特殊方式,可以加速求解。如果我们想要编写一个可以实时运行的BA系统,那就不可不考虑H矩阵的稀疏性。但是本文暂不考虑这么多,直接使用Eigen自带的方程组求解算法求解。
1.3 雅克比矩阵J(x)的获取
上文提到我们定义优化变量:
那么对应其中一个特征点 求解雅克比矩阵(详见<十四讲 p250页>):
其中,我们记为
,记
为
(与《14讲》p247页记号相同)。 其中
为该点的重投影误差,
为某个误差项关于空间点位置
的导数,
为某个误差项关于姿态扰动
的导数,至于为什么是关于姿态扰动的导数而不是关于姿态的导数,主要原因是求解
需要计算一个比较复杂的雅克比矩阵
(详见<14讲>p75、<状态估计>p216)。为了避免计算这个矩阵
(其实也没必要计算),我们使用扰动模型。如果对此还有疑惑,可以参考这篇文章的第二部分:
我们再来看 的形式,很容易看出来它是一个
维的矩阵。但是可要注意了,这只是一个误差项
的雅克比,我们一共拥有
个
(因为在两帧图像上,我们拥有
个特征点匹配),故整体的
的维度为
维。
那么整体的雅克比矩阵 就为(其实就是把
按行排列,可以参考<14讲>p251):
《14讲》中P164页推导了 和
的形式,我把
和
的具体表达形式写在下面:
我把 分为了两部分(注意第三列后的分割线),左边是关于平移t的雅克比,右边是关于旋转矩阵R的雅克比,另外注意E表达式中的R编程的时候不要漏掉!
2.具体实施过程
好吧,既然我们取得了 ,那么我们现在只需要求解增量方程:
就可以求解出 了。按理说应该利用
矩阵的稀疏性来求解的,不过本次我们直接使用Eigen求解。
求解出 后,更新
之后再次进行迭代,直至收敛。我直接设置为迭代5次。:
1 for(int i=1;i<=MAX_LOOP;i++){ //循环求解BA 2 std::cout<<"\033[32m"<<"Doing BA Please wait......"<<std::endl; 3 double t = (double)cv::getTickCount(); //计时开始 4 Eigen::MatrixXd Jacobian=findWholeJacobian(x); //求解状态x的Jacobian 5 Eigen::MatrixXd JacobianT=Jacobian.transpose(); //求解Jacobian 的转置 6 Eigen::MatrixXd H=JacobianT*Jacobian; //求解H矩阵 7 //std::cout<<"H = "<<endl<<H<<endl; 8 Eigen::MatrixXd fx=findCostFunction(x,v_P2d); //求解f(x)在状态x下的值 9 Eigen::VectorXd g=-1*JacobianT*fx; //求解g,相见<十四讲>p247 10 //求解delt_x 11 //1.Using the SVD decomposition 12 //Eigen::MatrixXd delt_x=H.bdcSvd(Eigen::ComputeThinU | Eigen::ComputeThinV).solve(g); 13 //2.Using the QR decomposition 14 std::cout<<"Solving ......"<<"\033[37m"<<std::endl; 15 Eigen::MatrixXd delt_x=H.colPivHouseholderQr().solve(g); 16 ///李代数相加需要添加一些余项,转化为R再相乘,代替李代数加法,详见14讲 72页; 17 ///把SE3上的李代数转化为4x4矩阵 18 Eigen::Matrix4d Pos_Matrix = Sophus::SE3::exp(x.block(0,0,6,1)).matrix(); 19 Eigen::Matrix4d Pos_update_Matrix = Sophus::SE3::exp(delt_x.block(0,0,6,1)).matrix(); 20 ///矩阵更新 21 Pos_Matrix = Pos_Matrix * Pos_update_Matrix; 22 ///转化为李代数 23 Sophus::SE3 new_Pos_se = 24 Sophus::SE3(Pos_Matrix.block<3,3>(0,0),Pos_Matrix.block<3,1>(0,3)); 25 ///更新姿态 26 x = x + delt_x; 27 x.block(0,0,6,1)=new_Pos_se.log(); 28 printf("BA cost %f ms \n", (1000*(cv::getTickCount() - t) / cv::getTickFrequency())); 29 //--------------------在原图相上画出观测和预测的坐标------------------------------------- 30 Eigen::VectorXd v_temp(6); 31 v_temp=x.block(0,0,6,1); 32 Sophus::SE3 SE3_temp=Sophus::SE3::exp(v_temp); 33 Eigen::Matrix<double,4,4> Pose = SE3_temp.matrix(); 34 cout<<"POSE:"<<endl<<Pose<<endl; 35 cv::Mat temp_Mat=img.clone(); 36 /// 投影到图像上,展现优化效果 37 for(int j=0;j<v_P3d.size();j++) { 38 double fx=camMatrix(0,0); 39 double fy=camMatrix(1,1); 40 double cx=camMatrix(0,2); 41 double cy=camMatrix(1,2); 42 Eigen::Matrix<double, 4, 1> Point; 43 Point(0,0)=x(6+3*j, 0); 44 Point(1,0)=x(1+6+3*j, 0); 45 Point(2,0)=x(2+6+3*j, 0); 46 Point(3,0)=1.0; 47 Eigen::Matrix<double, 4, 1> cam_Point = Pose * Point; //计算3D点在相机坐标系下的坐标 48 cv::Point2d temp_Point2d; 49 temp_Point2d.x=(fx*cam_Point(0,0)/cam_Point(2,0))+cx; 50 temp_Point2d.y=(fy*cam_Point(1,0)/cam_Point(2,0))+cy; 51 cv::circle(temp_Mat,temp_Point2d,3,cv::Scalar(0,0,255),2); 52 cv::circle(temp_Mat,v_P2d[j], 2,cv::Scalar(255,0,0),2); 53 } 54 imshow("REPROJECTION ERROR DISPLAY",temp_Mat); 55 cout<<"\033[32m"<<"Iteration: "<<i<<" Finish......"<<"\033[37m"<<endl; 56 cout<<"\033[32m"<<"Blue is observation......"<<"\033[37m"<<endl; 57 cout<<"\033[32m"<<"Red is reprojection......"<<"\033[37m"<<endl; 58 cout<<"\033[32m"<<"Press Any Key to continue......"<<"\033[37m"<<endl; 59 cv::waitKey(0); 60 }
我们可以看一下收敛的过程,其中红色点为重投影到图像上的特征点,蓝色点为观测到的特征点。可以看出来收敛还是很快的,基本上迭代三次红色和蓝色点就已经重合!!

第一次迭代结果

第二次迭代

第三次迭代

第四次迭代

第五次迭代
特征点提取过程略,参见《14讲》p138“实践:特征提取和匹配”源码。我从TUM数据集(rgbd_dataset_freiburg2_large_with_loop)中抽取了两张特征点比较多的图片(及第一张图片对应的深度图)作为例子。关于3D点坐标的计算,参考数据集说明,详见下图:
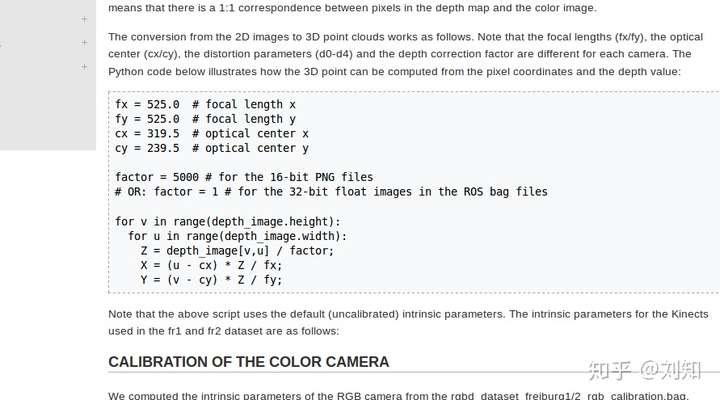
数据集相机内参
3.总结与讨论
1.为什么BA优化优于EKF。(工头叫我去搬砖.....有空再写)
2.如何只优化位姿中的旋转 而固定位移
,亦或反之。(很简单,F矩阵里的对应雅克比置零即可。工头叫我去搬砖.....有空再详写)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号