航测建模篇-正射影像地理配准-持续连载中
@ 20241205 & lth
编写时间:2025-12-04
更新时间:2025-12-05
选项:arosics
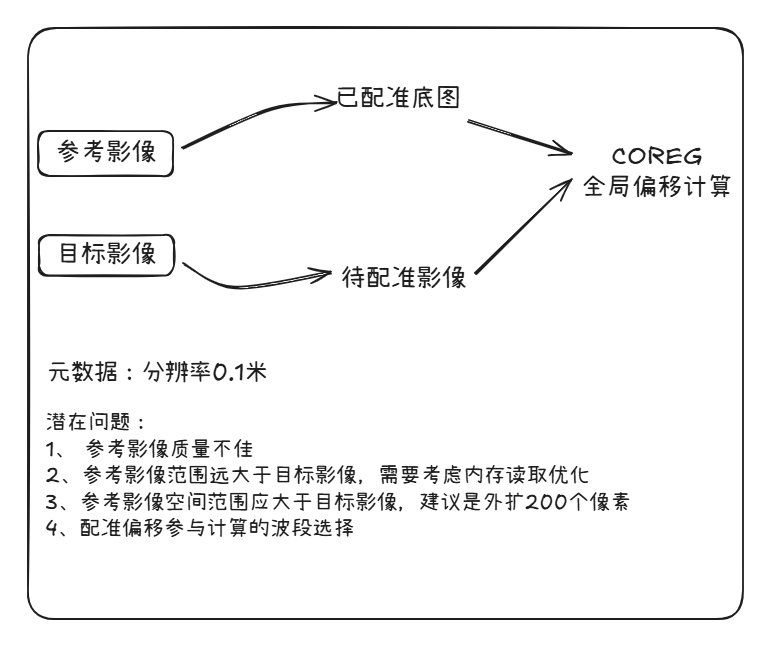
背景
对高分辨率影像如无人机dom以往期已较准的底图为参考影像、新拍摄建模生成的为待校正目标影像

@ 20241205 & lth
编写时间:2025-12-04
更新时间:2025-12-05
选项:arosics
对高分辨率影像如无人机dom以往期已较准的底图为参考影像、新拍摄建模生成的为待校正目标影像

 浙公网安备 33010602011771号
浙公网安备 33010602011771号