A*
A* 启发式搜索
引言:
先前提到过的优先队列算法,每次都取出当前价值最小的值进行扩展,虽然已经大大的降低了复杂度,但也会有很多数据来卡你的复杂度;
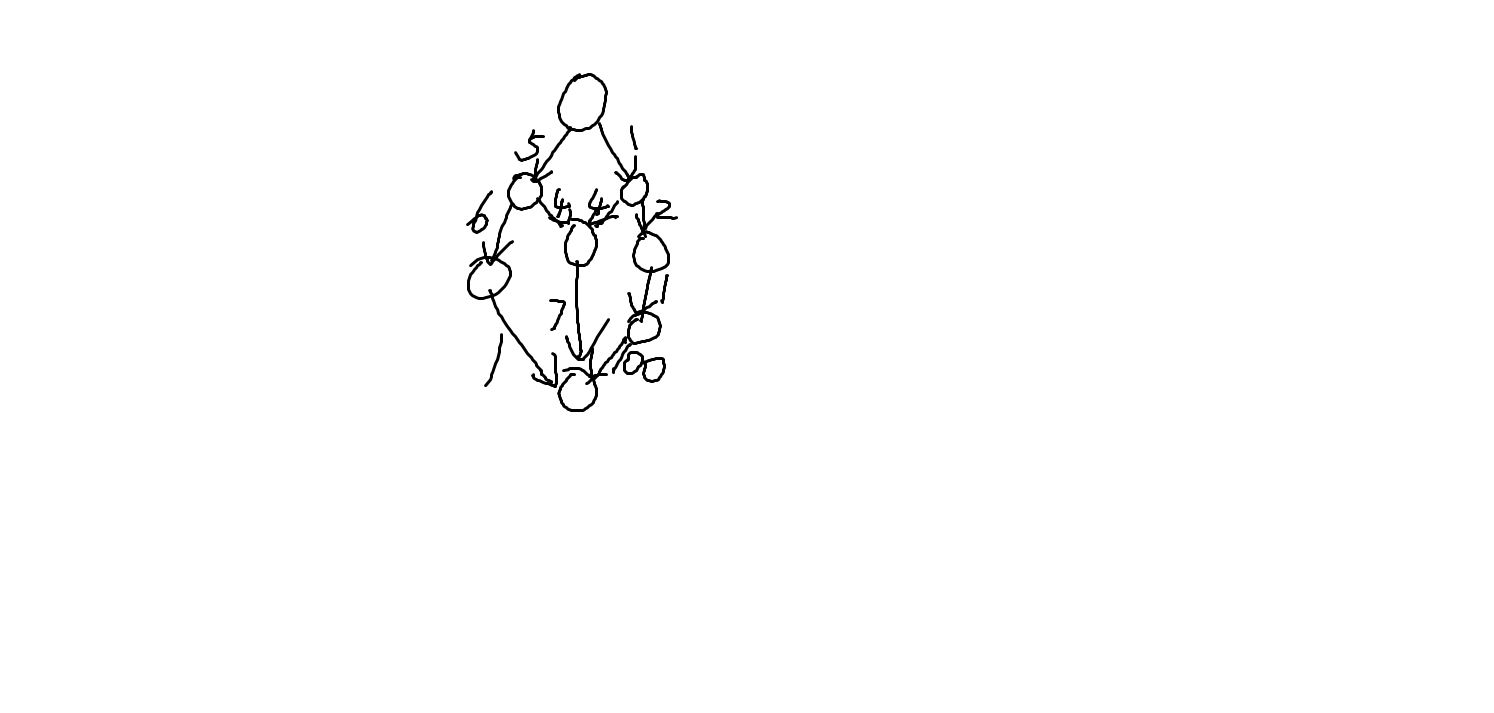
比如说上面这个图,我们会一直沿着右边这条路搜索,
然而最后我们发现一直沿着这条边搜索下去答案会变得很大,
这几次搜索就没什么用了;
最终答案为12;
在这样的基础上,我们可以对未来可能产生的情况进行预估;
设计了一个“估价函数”;
表示从该状态到目标状态的估计的价值;
用f(x)来表示估价函数;
用g(x)表示实际上从该状态到目标状态的价值
astar 的算法核心就是从堆中不断取出 [f(x)+当前代价] 的最小值进行扩展;
定理:
对于每一个当前状态 x
有f(x)<=g(x)恒成立;
若不成立,正确答案无法得出;
举个例子:
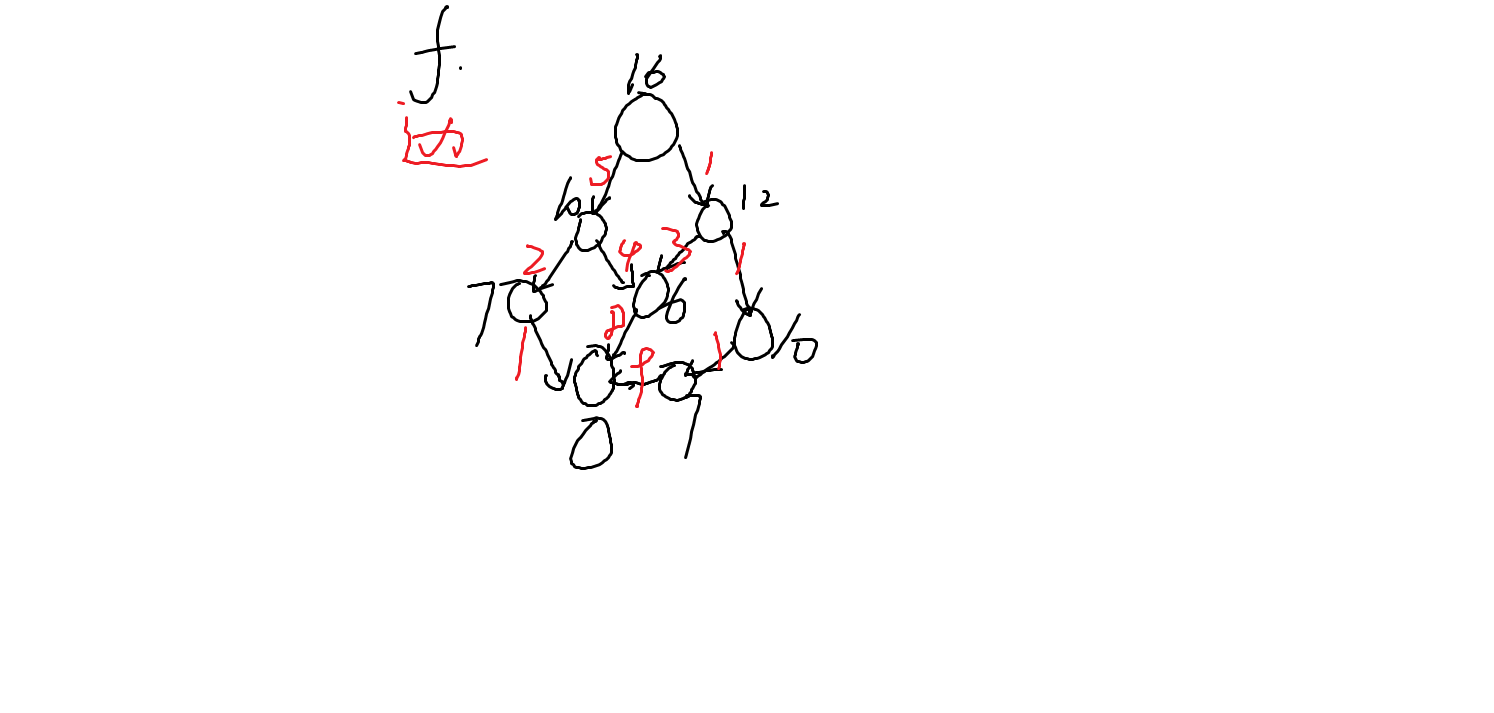
上图的数字代表着当前节点的f()值,也就是估计值,以及边权;
我们以更新最后一个答案来举一个例子:

红色代表着当前代价;
这时的
队列为: 3+7,4+6,5+10
取出:3+7;
得到12+0;插入队列;

此时队列为:4+6,12+0,5+10;
取出:4+6;
得到:12+0;
再次取出时,取出的值是12+0;
此时目标节点第一次被取出应为答案;
ans=12;
然而事实上这道题根据优先队列来做应该是 8

为最左端的一条路径;
由此可见当估价函数被错误地估计到了大于实际价值时,
我们的正解实际上是被压在堆里出不来;
根据设计估价函数小于实际代价:
假如某非最优解路径上的某一点s先被扩展;
那么,当目标节点被取出来前的某一时刻:
1、s为非最优解,所以s的当前代价大于从 start 到 end 的最小代价 minn;
2、状态 t 为最优解路径上的一个状态,就有 t状态代价+f(t) <= t当前代价+g(t) =minn;
所以s当前代价>t当前代价+f(t),t状态就会比s先扩展,从而找到最优解;
A* 算法的实质:
带有估价的优先队列bfs;
例题 1:
这个题目的大意是:给了一个n个点,m个边的图,求start 到 end的第k短路长度;
一个比较直观的做法是优先队列bfs
当一个状态被第一次取出时:我们可以得到从出态到此状态的最小代价;
推论:当一个状态被第i次取出时,对应的代价是start 到 此状态的第i短路;
所以当目标节点被第k次取出时,我们就得到了答案
我们用优先队列极有可能会超时,
所以我们使用astar 算法;
按照f()的设计准则,f(x)要小于等于实际的x到end的第k短距离;
所以我们可以设计f为当前节点x到end 的最短路
然后进行优先队列算法,当第k次取出时,即为答案;
怎样记录节点被取出呢?
我们可以用一个二元组pair<int,int> 。这时c++stl自带的一个组,可以把他想象成一个两个元素的结构体;
然后优先队列也用二元组定义;


1 #include <bits/stdc++.h> 2 using namespace std; 3 const int N = 1006; 4 int n, m, st, ed, k, f[N], cnt[N]; 5 bool v[N]; 6 vector<pair<int, int> > e[N], fe[N]; 7 priority_queue<pair<int, int> > pq; 8 9 void dijkstra() { 10 memset(f, 0x3f, sizeof(f)); 11 memset(v, 0, sizeof(v)); 12 f[ed] = 0; 13 pq.push(make_pair(0, ed)); 14 while (pq.size()) { 15 int x = pq.top().second; 16 pq.pop(); 17 if (v[x]) continue; 18 v[x] = 1; 19 for (unsigned int i = 0; i < fe[x].size(); i++) { 20 int y = fe[x][i].first, z = fe[x][i].second; 21 if (f[y] > f[x] + z) { 22 f[y] = f[x] + z; 23 pq.push(make_pair(-f[y], y)); 24 } 25 } 26 } 27 } 28 29 void A_star() { 30 if (st == ed) ++k; 31 pq.push(make_pair(-f[st], st)); 32 memset(cnt, 0, sizeof(cnt)); 33 while (pq.size()) { 34 int x = pq.top().second; 35 int dist = -pq.top().first - f[x]; 36 pq.pop(); 37 ++cnt[x]; 38 if (cnt[ed] == k) { 39 cout << dist << endl; 40 return; 41 } 42 for (unsigned int i = 0; i < e[x].size(); i++) { 43 int y = e[x][i].first, z = e[x][i].second; 44 if (cnt[y] != k) pq.push(make_pair(-f[y] - dist - z, y)); 45 } 46 } 47 cout << "-1" << endl; 48 } 49 50 int main() { 51 cin >> n >> m; 52 for (int i = 1; i <= m; i++) { 53 int x, y, z; 54 scanf("%d %d %d", &x, &y, &z); 55 e[x].push_back(make_pair(y, z)); 56 fe[y].push_back(make_pair(x, z)); 57 } 58 cin >> st >> ed >> k; 59 dijkstra(); 60 A_star(); 61 return 0; 62 }
因为我们加上了一个估价函数,我们的实际时间复杂度被大大降低,能够快速求出结果。
例题2:
先讲有解时的移动方法:
问题有解时,我们可以采用astar算法搜索一种移动步数最少的方案;
我们可以发现,每次移动是将空格与一个数字换一个位置;
至多每次将一个数字朝他的目标位置移动一格;、
所以即使每个数字的移动都是有意义的,
在一个状态x,从 此状态到目标状态的总步数 不可能小于 所有数字从此状态到目标状态的曼哈顿距离之和;
所以,我们的估价函数f就可以设为 :所有数字从此状态到目标状态的曼哈顿距离之和;
即:for(num=1->9) f(x)+=abs(x_a_num-end_a_num)+abs(x_b_num-end_b_num)
然后进行优先队列搜索;
可行解判断:
奇数码问题:奇数码两个局面可以互相达到,当且仅当,
两个局面的数字写成一列后(空格不算),逆序对的奇偶性相同;
必要性证明:
空格左右移动时,写出来的序列相同;
空格上下移动时,相当于某个数与它前后的n-1个数交换了位置,
n-1为一个偶数,所以逆序对的变化个数也是偶数。
所以八数码问题就是一个n=3的奇数码问题;
只需要判断前后状态的逆序对奇偶就能判断是否有解了;
这里放出的是没有用逆序对判断的代码,比起用判断可能时间较大;
1 #include<bits/stdc++.h> 2 using namespace std; 3 // state:八数码的状态(3*3九宫格压缩为一个整数) 4 // dist:当前代价 + 估价 5 struct rec{int state,dist; 6 rec(){} 7 rec(int s,int d){state=s,dist=d;} 8 }; 9 int a[3][3]; 10 11 map<int,int> d,f,go; 12 priority_queue<rec> q; 13 const int dx[4]={-1,0,0,1},dy[4]={0,-1,1,0}; 14 char dir[4]={'u','l','r','d'}; 15 16 bool operator <(rec a,rec b) { 17 return a.dist>b.dist; 18 } 19 20 // 把3*3的九宫格压缩为一个整数(9进制) 21 int calc(int a[3][3]) { 22 int val=0; 23 for(int i=0;i<3;i++) 24 for(int j=0;j<3;j++) { 25 val=val*9+a[i][j]; 26 } 27 return val; 28 } 29 30 // 从一个9进制数复原出3*3的九宫格,以及空格位置 31 pair<int,int> recover(int val,int a[3][3]) { 32 int x,y; 33 for(int i=2;i>=0;i--) 34 for(int j=2;j>=0;j--) { 35 a[i][j]=val%9; 36 val/=9; 37 if(a[i][j]==0) x=i,y=j; 38 } 39 return make_pair(x,y); 40 } 41 42 // 计算估价函数 43 int value(int a[3][3]) { 44 int val=0; 45 for(int i=0;i<3;i++) 46 for(int j=0;j<3;j++) { 47 if(a[i][j]==0) continue; 48 int x=(a[i][j]-1)/3; 49 int y=(a[i][j]-1)%3; 50 val+=abs(i-x)+abs(j-y); 51 } 52 return val; 53 } 54 55 // A*算法 56 int astar(int sx,int sy,int e) { 57 d.clear(); f.clear(); go.clear(); 58 while(q.size()) q.pop(); 59 int start=calc(a); 60 d[start]=0; 61 q.push(rec(start,0+value(a))); 62 while(q.size()) { 63 // 取出堆顶 64 int now=q.top().state; q.pop(); 65 // 第一次取出目标状态时,得到答案 66 if(now==e) return d[now]; 67 int a[3][3]; 68 // 复原九宫格 69 pair<int,int> space=recover(now,a); 70 //空格位置 71 int x=space.first,y=space.second; 72 // 枚举空格的移动方向(上下左右) 73 for(int i=0;i<4;i++) { 74 int nx=x+dx[i], ny=y+dy[i]; 75 if (nx<0||nx>2||ny<0||ny>2) continue; 76 swap(a[x][y],a[nx][ny]); 77 int next=calc(a); 78 // next状态没有访问过,或者能被更新 79 if(d.find(next)==d.end()||d[next]>d[now]+1) { 80 d[next]=d[now]+1; 81 // f和go记录移动的路线,以便输出方案 82 f[next]=now; 83 go[next]=i; 84 // 入堆 85 q.push(rec(next,d[next]+value(a))); 86 } 87 swap(a[x][y],a[nx][ny]);//回溯 88 } 89 } 90 return -1; 91 } 92 93 void print(int e) { 94 if(f.find(e)==f.end()) return; 95 print(f[e]); 96 putchar(dir[go[e]]); 97 } 98 99 int main() { 100 int end=0; 101 for(int i=1;i<=8;i++) end=end*9+i; 102 end*=9; 103 int x,y; 104 for(int i=0;i<3;i++) 105 for(int j=0;j<3;j++) { 106 char str[2]; 107 scanf("%s",str); 108 if(str[0]=='x') a[i][j]=0,x=i,y=j; 109 else a[i][j]=str[0]-'0'; 110 } 111 int ans=astar(x,y,end); 112 if(ans==-1) puts("unsolvable"); else print(end); 113 return 0; 114 }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号