优化算法-3.梯度下降
梯度下降法
尽管梯度下降(gradient descent)很少直接用于深度学习, 但了解它是理解下一节随机梯度下降算法的关键。 例如,由于学习率过大,优化问题可能会发散,这种现象早已在梯度下降中出现。 同样地,预处理(preconditioning)是梯度下降中的一种常用技术, 还被沿用到更高级的算法中。 让我们从简单的一维梯度下降开始。
一维梯度下降
梯度下降算法是最简单的迭代求解算法:
首先选取开始点\(x_0\),对\(t=1,...,T\),我们有
其中\(\eta\)叫做学习率。\(\nabla f(x_{t-1})\)是f(x_{t-1})的梯度,它的梯度是朝着\(f(x)\)值增大的方向,所以这个是负的。
为什么梯度下降算法可以优化目标函数? 一维中的梯度下降给我们很好的启发。 考虑一类连续可微实值函数\(f: \mathbb{R} \rightarrow \mathbb{R}\), 利用泰勒展开,我们可以得到
即在一阶近似中,\(f(x+\epsilon)\)可通过处的函数值\(f(x)\)和一阶导数\(f'(x)\)得出。 我们可以假设在负梯度方向上移动的\(\epsilon\)会减少\(f\)。 为了简单起见,我们选择固定步长\(\eta > 0\),然后取\(\epsilon = -\eta f'(x)\)。 将其代入泰勒展开式我们可以得到
如果其导数\(f'(x) \neq 0\)没有消失,我们就能继续展开,这是因为\(\eta f'^2(x)>0\)。 此外,我们总是可以令\(\eta\)小到足以使高阶项变得不相关。 因此,
这意味着,如果我们使用
来迭代\(x\),函数\(f(x)\)的值可能会下降。 因此,在梯度下降中,我们首先选择初始值\(x\)和常数\(\eta > 0\), 然后使用它们连续迭代\(x\),直到停止条件达成。 例如,当梯度\(|f'(x)|\)的幅度足够小或迭代次数达到某个值时。
下面我们来展示如何实现梯度下降。为了简单起见,我们选用目标函数\(f(x)=x^2\)。 尽管我们知道\(x=0\)时\(f(x)\)能取得最小值, 但我们仍然使用这个简单的函数来观察\(x\)的变化
%matplotlib inline
import numpy as np
import torch
from d2l import torch as d2l
def f(x): # 目标函数
return x ** 2
def f_grad(x): # 目标函数的梯度(导数)
return 2 * x
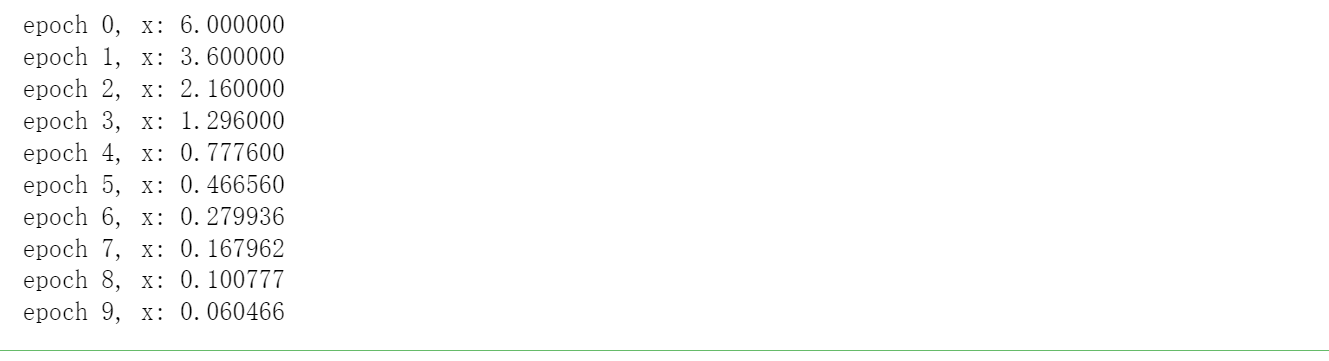
接下来,我们使用\(x=10\)作为初始值,并假设\(\eta=0.2\)。 使用梯度下降法迭代\(x\)共10次,我们可以看到,\(x\)的值最终将接近最优解。
def gd(eta, f_grad):
x = 10.0
results = [x]
for i in range(10):
x -= eta * f_grad(x)
results.append(float(x))
print(f'epoch {i:d}, x: {x:f}')
return results
results = gd(0.2, f_grad)
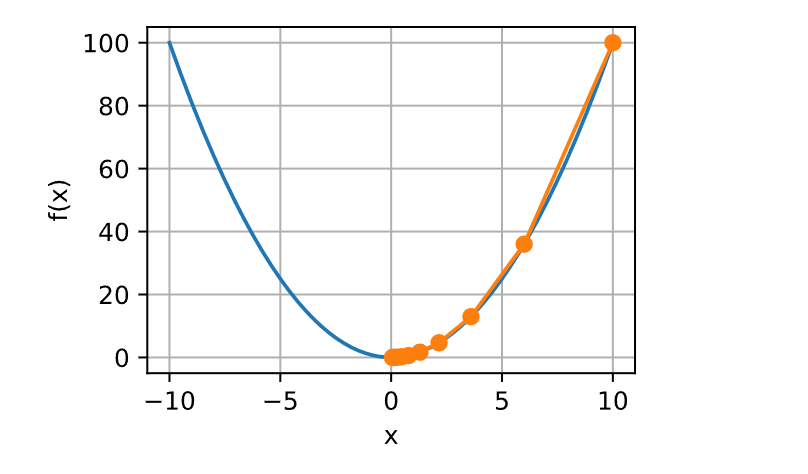
对\(x\)进行优化的过程可以绘制如下。
def show_trace(results, f):
n = max(abs(min(results)), abs(max(results)))
f_line = torch.arange(-n, n, 0.01)
d2l.set_figsize()
d2l.plot([f_line, results], [[f(x) for x in f_line], [
f(x) for x in results]], 'x', 'f(x)', fmts=['-', '-o'])
show_trace(results, f)
学习率
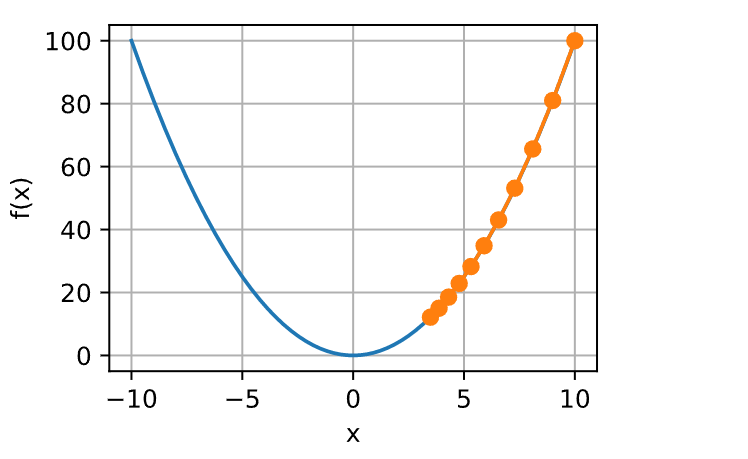
学习率(learning rate)决定目标函数能否收敛到局部最小值,以及何时收敛到最小值。 学习率\(\eta\)可由算法设计者设置。 请注意,如果我们使用的学习率太小,将导致\(x\)的更新非常缓慢,需要更多的迭代。 例如,考虑同一优化问题中\(\eta = 0.05\)的进度。 如下所示,尽管经过了10个步骤,我们仍然离最优解很远。
show_trace(gd(0.05, f_grad), f)
epoch 0, x: 9.000000
epoch 1, x: 8.100000
epoch 2, x: 7.290000
epoch 3, x: 6.561000
epoch 4, x: 5.904900
epoch 5, x: 5.314410
epoch 6, x: 4.782969
epoch 7, x: 4.304672
epoch 8, x: 3.874205
epoch 9, x: 3.486784
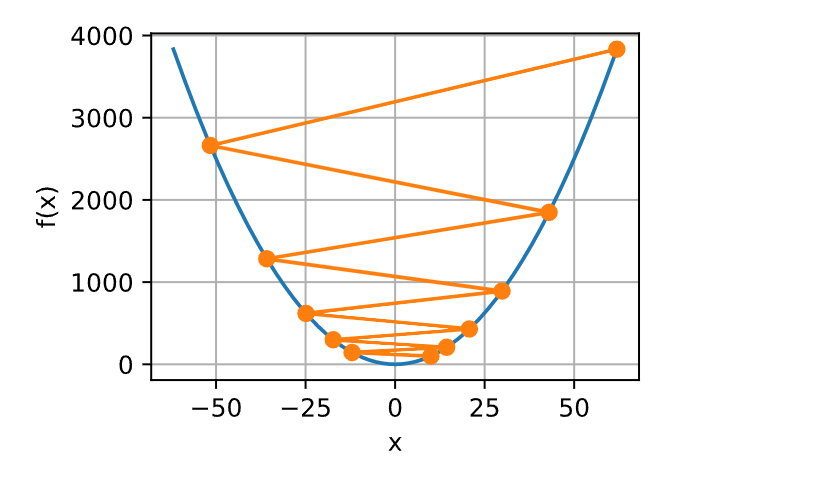
相反,如果我们使用过高的学习率,\(\left|\eta f'(x)\right|\)对于一阶泰勒展开式可能太大。 也就是说,\(\mathcal{O}(\eta^2 f'^2(x))\)可能变得显著了。 在这种情况下,\(x\)的迭代不能保证降低\(f(x)\)的值。 例如,当学习率为\(\eta=1.1\)时,\(x\)超出了最优解\(x=0\)并逐渐发散。
show_trace(gd(1.1, f_grad), f)
epoch 0, x: -12.000000
epoch 1, x: 14.400000
epoch 2, x: -17.280000
epoch 3, x: 20.736000
epoch 4, x: -24.883200
epoch 5, x: 29.859840
epoch 6, x: -35.831808
epoch 7, x: 42.998170
epoch 8, x: -51.597804
epoch 9, x: 61.917364
局部最小值
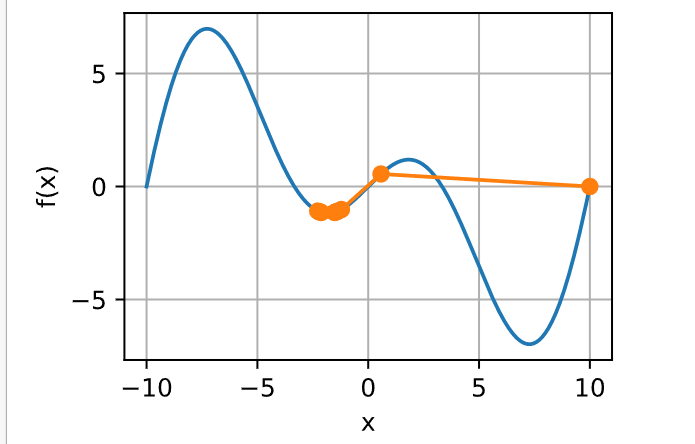
为了演示非凸函数的梯度下降,考虑函数\(f(x) = x \cdot \cos(cx)\),其中\(c\)为某常数。 这个函数有无穷多个局部最小值。 根据我们选择的学习率,我们最终可能只会得到许多解的一个。 下面的例子说明了(不切实际的)高学习率如何导致较差的局部最小值。
c = torch.tensor(0.15 * np.pi)
def f(x): # 目标函数
return x * torch.cos(c * x)
def f_grad(x): # 目标函数的梯度
return torch.cos(c * x) - c * x * torch.sin(c * x)
show_trace(gd(2, f_grad), f)
epoch 0, x: 0.575222
epoch 1, x: -1.206588
epoch 2, x: -2.279598
epoch 3, x: -1.343416
epoch 4, x: -2.206769
epoch 5, x: -1.425789
epoch 6, x: -2.154634
epoch 7, x: -1.483876
epoch 8, x: -2.114354
epoch 9, x: -1.528166
多元梯度下降
现在我们对单变量的情况有了更好的理解,让我们考虑一下\(\mathbf{x} = [x_1, x_2, \ldots, x_d]^\top\)的情况。 即目标函数\(f: \mathbb{R}^d \to \mathbb{R}\)将向量映射成标量。 相应地,它的梯度也是多元的,它是一个由\(d\)个偏导数组成的向量:
梯度中的每个偏导数元素\(\partial f(\mathbf{x})/\partial x_i\)代表了当输入\(x_i\)时\(f\)在\(x\)处的变化率。 和先前单变量的情况一样,我们可以对多变量函数使用相应的泰勒近似来思考。 具体来说,
换句话说,在\(\boldsymbol{\epsilon}\)的二阶项中, 最陡下降的方向由负梯度\(-\nabla f(\mathbf{x})\)得出。 选择合适的学习率\(\eta > 0\)来生成典型的梯度下降算法:
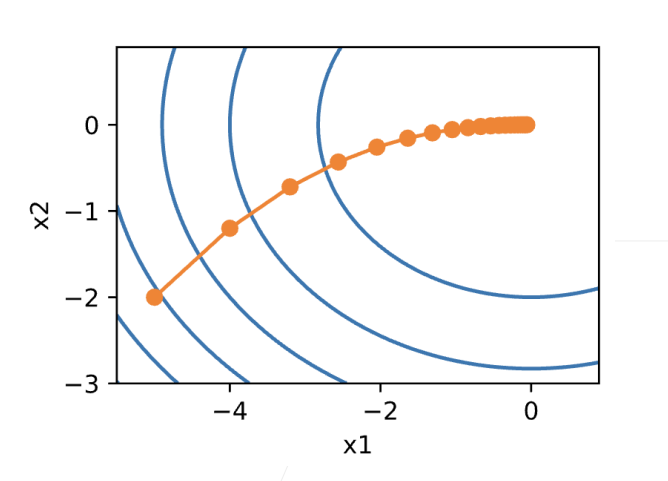
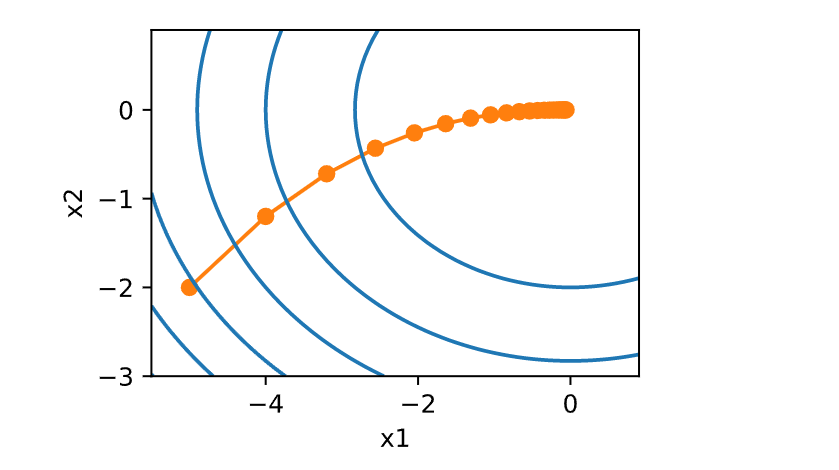
这个算法在实践中的表现如何呢? 我们构造一个目标函数\(f(\mathbf{x})=x_1^2+2x_2^2\), 并有二维向量\(\mathbf{x} = [x_1, x_2]^\top\)作为输入, 标量作为输出。 梯度由\(\nabla f(\mathbf{x}) = [2x_1, 4x_2]^\top\)给出。 我们将从初始位置\([-5, -2]\)通过梯度下降观察\(x\)的轨迹。
我们还需要两个辅助函数: 第一个是update函数,并将其应用于初始值20次; 第二个函数会显示\(x\)的轨迹。
def train_2d(trainer, steps=20, f_grad=None): #@save
"""用定制的训练机优化2D目标函数"""
# s1和s2是稍后将使用的内部状态变量
x1, x2, s1, s2 = -5, -2, 0, 0
results = [(x1, x2)]
for i in range(steps):
if f_grad:
x1, x2, s1, s2 = trainer(x1, x2, s1, s2, f_grad)
else:
x1, x2, s1, s2 = trainer(x1, x2, s1, s2)
results.append((x1, x2))
print(f'epoch {i + 1}, x1: {float(x1):f}, x2: {float(x2):f}')
return results
def show_trace_2d(f, results): #@save
"""显示优化过程中2D变量的轨迹"""
d2l.set_figsize()
d2l.plt.plot(*zip(*results), '-o', color='#ff7f0e')
x1, x2 = torch.meshgrid(torch.arange(-5.5, 1.0, 0.1),
torch.arange(-3.0, 1.0, 0.1), indexing='ij')
d2l.plt.contour(x1, x2, f(x1, x2), colors='#1f77b4')
d2l.plt.xlabel('x1')
d2l.plt.ylabel('x2')
接下来,我们观察学习率\(\eta = 0.1\)时优化变量\(x\)的轨迹。 可以看到,经过20步之后,\(x\)的值接近其位于\([0, 0]\)的最小值。 虽然进展相当顺利,但相当缓慢。
def f_2d(x1, x2): # 目标函数
return x1 ** 2 + 2 * x2 ** 2
def f_2d_grad(x1, x2): # 目标函数的梯度
return (2 * x1, 4 * x2)
def gd_2d(x1, x2, s1, s2, f_grad):
g1, g2 = f_grad(x1, x2)
return (x1 - eta * g1, x2 - eta * g2, 0, 0)
eta = 0.1
show_trace_2d(f_2d, train_2d(gd_2d, f_grad=f_2d_grad))
epoch 1, x1: -4.000000, x2: -1.200000
epoch 2, x1: -3.200000, x2: -0.720000
epoch 3, x1: -2.560000, x2: -0.432000
epoch 4, x1: -2.048000, x2: -0.259200
epoch 5, x1: -1.638400, x2: -0.155520
epoch 6, x1: -1.310720, x2: -0.093312
epoch 7, x1: -1.048576, x2: -0.055987
epoch 8, x1: -0.838861, x2: -0.033592
epoch 9, x1: -0.671089, x2: -0.020155
epoch 10, x1: -0.536871, x2: -0.012093
epoch 11, x1: -0.429497, x2: -0.007256
epoch 12, x1: -0.343597, x2: -0.004354
epoch 13, x1: -0.274878, x2: -0.002612
epoch 14, x1: -0.219902, x2: -0.001567
epoch 15, x1: -0.175922, x2: -0.000940
epoch 16, x1: -0.140737, x2: -0.000564
epoch 17, x1: -0.112590, x2: -0.000339
epoch 18, x1: -0.090072, x2: -0.000203
epoch 19, x1: -0.072058, x2: -0.000122
epoch 20, x1: -0.057646, x2: -0.000073
自适应方法
选择"恰到好处"的学习率\(\eta\)是很棘手的。如果我们把它选得太小,就没有什么进展;如果太大,得到的解就会振荡,甚至可能发散。 如果我们可以自动确定\(\eta\),或者完全不必选择学习率,会怎么样? 除了考虑目标函数的值和梯度、还考虑它的曲率的二阶方法可以帮我们解决这个问题。 虽然由于计算代价的原因,这些方法不能直接应用于深度学习,但它们为如何设计高级优化算法提供了有用的思维直觉,这些算法可以模拟下面概述的算法的许多理想特性。
牛顿法
回顾一些函数\(f: \mathbb{R}^d \rightarrow \mathbb{R}\)的泰勒展开式,事实上我们可以把它写成
为了避免繁琐的符号,我们将\(\mathbf{H} \stackrel{\mathrm{def}}{=} \nabla^2 f(\mathbf{x})\)定义为的Hessian,是\(d \times d\)矩阵。 当\(d\)的值很小且问题很简单时,\(\mathbf{H}\)很容易计算。 但是对于深度神经网络而言,考虑到\(\mathbf{H}\)可能非常大, \(\mathcal{O}(d^2)\)个条目的存储代价会很高, 此外通过反向传播进行计算可能雪上加霜。 然而,我们姑且先忽略这些考量,看看会得到什么算法。
毕竟,\(f\)的最小值满足\(\nabla f = 0\)。 遵循微积分规则, 通过取\(\boldsymbol{\epsilon}\)对上式的导数, 再忽略不重要的高阶项,我们便得到
也就是说,作为优化问题的一部分,我们需要将Hessian矩阵\(\mathbf{H}\)求逆。
举一个简单的例子,对于\(f(x) = \frac{1}{2} x^2\),我们有\(\nabla f(x) = x\)和\(\mathbf{H} = 1\)。 因此,对于任何\(x\),我们可以获得\(\epsilon = -x\)。 换言之,单单一步就足以完美地收敛,而无须任何调整。 我们在这里比较幸运:泰勒展开式是确切的,因为\(f(x+\epsilon)= \frac{1}{2} x^2 + \epsilon x + \frac{1}{2} \epsilon^2\)。
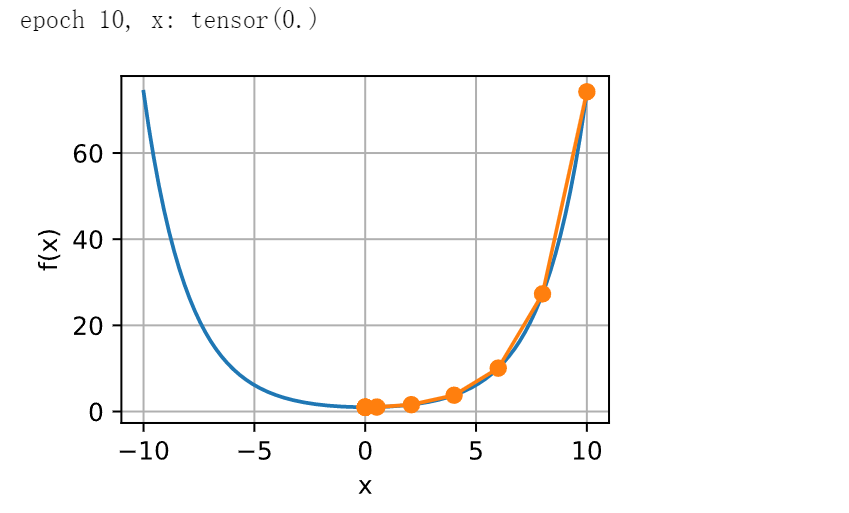
让我们看看其他问题。 给定一个凸双曲余弦函数\(c\),其中\(c\)为某些常数, 我们可以看到经过几次迭代后,得到了\(x=0\)处的全局最小值。
c = torch.tensor(0.5)
def f(x): # O目标函数
return torch.cosh(c * x)
def f_grad(x): # 目标函数的梯度
return c * torch.sinh(c * x)
def f_hess(x): # 目标函数的Hessian
return c**2 * torch.cosh(c * x)
def newton(eta=1):
x = 10.0
results = [x]
for i in range(10):
x -= eta * f_grad(x) / f_hess(x)
results.append(float(x))
print('epoch 10, x:', x)
return results
show_trace(newton(), f)
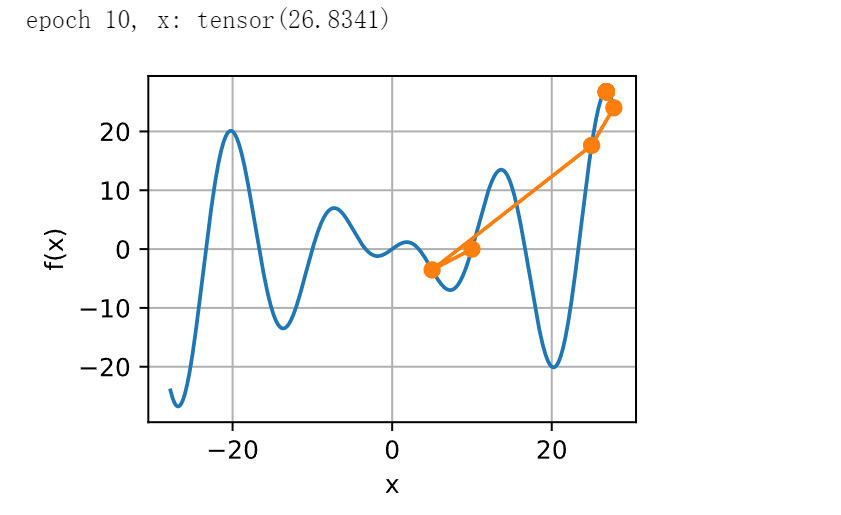
现在让我们考虑一个非凸函数,比如\(f(x) = x \cos(c x)\),\(c\)为某些常数。 请注意在牛顿法中,我们最终将除以Hessian。 这意味着如果二阶导数是负的,的值可能会趋于增加。 这是这个算法的致命缺陷! 让我们看看实践中会发生什么。
c = torch.tensor(0.15 * np.pi)
def f(x): # 目标函数
return x * torch.cos(c * x)
def f_grad(x): # 目标函数的梯度
return torch.cos(c * x) - c * x * torch.sin(c * x)
def f_hess(x): # 目标函数的Hessian
return - 2 * c * torch.sin(c * x) - x * c**2 * torch.cos(c * x)
show_trace(newton(), f)
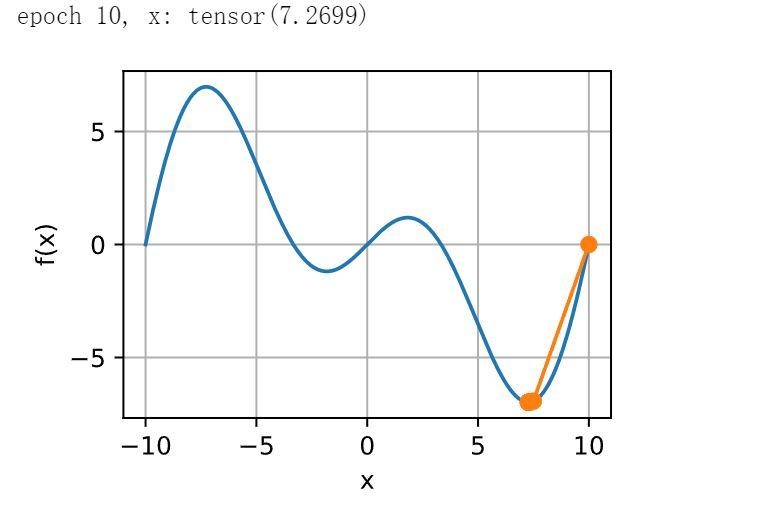
这发生了惊人的错误。我们怎样才能修正它? 一种方法是用取Hessian的绝对值来修正,另一个策略是重新引入学习率。 这似乎违背了初衷,但不完全是——拥有二阶信息可以使我们在曲率较大时保持谨慎,而在目标函数较平坦时则采用较大的学习率。 让我们看看在学习率稍小的情况下它是如何生效的,比如\(\eta = 0.5\)。 如我们所见,我们有了一个相当高效的算法。
show_trace(newton(0.5), f)
收敛性分析
在此,我们以部分目标凸函数\(f\)为例,分析它们的牛顿法收敛速度。 这些目标凸函数三次可微,而且二阶导数不为零,即\(f'' > 0\)。 由于多变量情况下的证明是对以下一维参数情况证明的直接拓展,对我们理解这个问题不能提供更多帮助,因此我们省略了多变量情况的证明。
用\(x^{(k)}\)表示\(x\)在第\(k^\mathrm{th}\)次迭代时的值, 令$e^{(k)} \stackrel{\mathrm{def}}{=} x^{(k)} - x^* \(表示\)k^\mathrm{th}\(迭代时与最优性的距离。 通过泰勒展开,我们得到条件\)f'(x^*) = 0$可以写成
这对某些\(\xi^{(k)} \in [x^{(k)} - e^{(k)}, x^{(k)}]\)成立。 将上述展开除以\(f''(x^{(k)})\)得到
回想之前的方程\(x^{(k+1)} = x^{(k)} - f'(x^{(k)}) / f''(x^{(k)})\)。 代入这个更新方程,取两边的绝对值,我们得到
因此,每当我们处于有界区域\(\left|f'''(\xi^{(k)})\right| / (2f''(x^{(k)})) \leq c\), 我们就有一个二次递减误差
另一方面,优化研究人员称之为“线性”收敛,而将\(\left|e^{(k+1)}\right| \leq \alpha \left|e^{(k)}\right|\)这样的条件称为“恒定”收敛速度。 请注意,我们无法估计整体收敛的速度,但是一旦我们接近极小值,收敛将变得非常快。 另外,这种分析\(f\)要求在高阶导数上表现良好,即确保\(f\)在如何变化它的值方面没有任何“超常”的特性。
预处理
计算和存储完整的Hessian非常昂贵,而改善这个问题的一种方法是“预处理”。 它回避了计算整个Hessian,而只计算“对角线”项,即如下的算法更新:
虽然这不如完整的牛顿法精确,但它仍然比不使用要好得多。 为什么预处理有效呢? 假设一个变量以毫米表示高度,另一个变量以公里表示高度的情况。 假设这两种自然尺度都以米为单位,那么我们的参数化就出现了严重的不匹配。 幸运的是,使用预处理可以消除这种情况。 梯度下降的有效预处理相当于为每个变量选择不同的学习率(矢量\(\mathbf{x}\)的坐标)。 我们将在后面一节看到,预处理推动了随机梯度下降优化算法的一些创新。
梯度下降和线搜索
梯度下降的一个关键问题是我们可能会超过目标或进展不足, 解决这一问题的简单方法是结合使用线搜索和梯度下降。 也就是说,我们使用\(\nabla f(\mathbf{x})\)给出的方向, 然后进行二分搜索,以确定哪个学习率\(\eta\)使\(f(\mathbf{x} - \eta \nabla f(\mathbf{x}))\)取最小值。
小结
-
学习率的大小很重要:学习率太大会使模型发散,学习率太小会没有进展。
-
梯度下降会可能陷入局部极小值,而得不到全局最小值。
-
在高维模型中,调整学习率是很复杂的。
-
预处理有助于调节比例。
-
牛顿法在凸问题中一旦开始正常工作,速度就会快得多。
-
对于非凸问题,不要不作任何调整就使用牛顿法。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号