
论文笔记:多标签学习综述(A review on multi-label learning algorithms)
2014 TKDE(IEEE Transactions on Knowledge and Data Engineering)
张敏灵,周志华
简单介绍
传统监督学习主要是单标签学习,而现实生活中目标样本往往比较复杂,具有多个语义,含有多个标签。本综述主要介绍了多标签学习的一些相关内容,包括相关定义,评价指标,8个多标签学习算法,相关的其它任务。
论文大纲
- 相关定义:学习任务,三种策略
- 评价指标:基于样本的评价指标,基于标签的评价指标
- 学习算法:介绍了8个有代表性的算法,4个基于问题转化的算法和4个基于算法改进的算法
- 相关任务:多实例学习,有序分类,多任务学习,数据流学习
相关定义
-
学习任务
\(X = \mathbb{R}^{d}\)表示d维的输入空间,\(Y=\{y_1, y_2, ..., y_q\}\)表示带有q个可能标签的标签空间。
训练集$D = {(x^i, y^i)| 1 \leq i \leq m} \(,m表示训练集的大小,上标表示样本序数,有时候会省略。 \)x^i \in X\(,是一个d维的向量。\)y^i \subseteq Y\(,是\)Y\(的一个标签子集。 任务就是要学习一个多标签分类器\)h(\cdot )\(,预测\)h(x) \subseteq Y\(作为x的正确标签集。 常见的做法是学习一个衡量x和y相关性的函数\)f(x, y_j)\(,希望\)f(x, y_{j1}) > f(x, y_{j2})\(,其中\)y_{j1} \in y, y_{j2} \notin y\(。 \)h(x)\(可以由\)f(x)\(衍生得到,\)h(x) = {y_j | f(x,y_j) > t(x), y_j \in Y}\(。 \)t(x)\(扮演阈值函数的角色,把标签空间对分成相关的标签集和不相关的标签集。 阈值函数可以由训练集产生,可以设为常数。当\)f(x, y_j)$返回的是一个概率值时,阈值函数可设为常数0.5。 -
三种策略
多标签学习的主要难点在于输出空间的爆炸增长,比如20个标签,输出空间就有\(2^{20}\),为了应对指数复杂度的标签空间,需要挖掘标签之间的相关性。比方说,一个图像被标注的标签有热带雨林和足球,那么它具有巴西标签的可能性就很高。一个文档被标注为娱乐标签,它就不太可能和政治相关。有效的挖掘标签之间的相关性,是多标签学习成功的关键。根据对相关性挖掘的强弱,可以把多标签算法分为三类。
- 一阶策略:忽略和其它标签的相关性,比如把多标签分解成多个独立的二分类问题(简单高效)。
- 二阶策略:考虑标签之间的成对关联,比如为相关标签和不相关标签排序。
- 高阶策略:考虑多个标签之间的关联,比如对每个标签考虑所有其它标签的影响(效果最优)。
评价指标
可分为两类
- 基于样本的评价指标(先对单个样本评估表现,然后对多个样本取平均)
- 基于标签的评价指标(先考虑单个标签在所有样本上的表现,然后对多个标签取平均)
每类又可分为用于分类任务和用于排序任务的指标,具体指标如下图所示
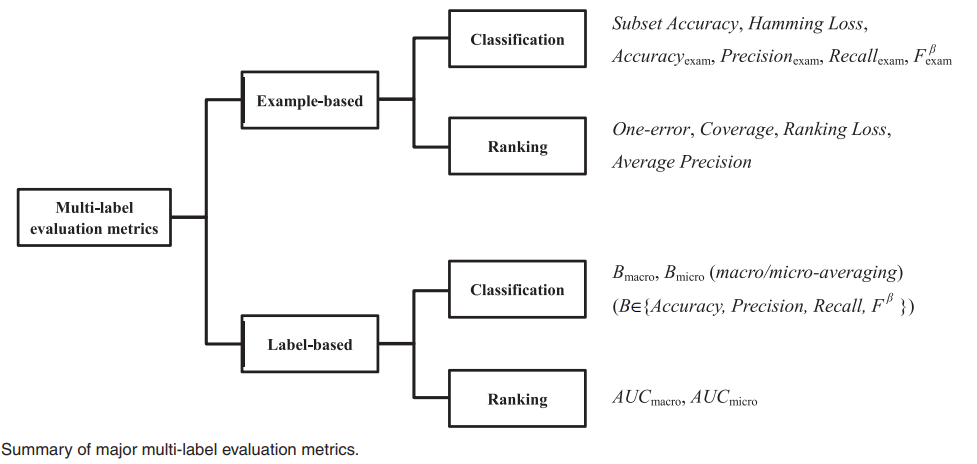
下面对图中的每个指标进行介绍。
基于样本的评价指标
- Subset Accuracy(衡量正确率,预测的样本集和真实的样本集完全一样才算正确。)
其中p表示测试集的样本大小,\(1\{\pi\}\)表示\(\pi\)为真时返回1,否则返回0。
- Hamming Loss(衡量的是错分的标签比例,正确标签没有被预测以及错误标签被预测的标签占比)
其中\(\Delta\)表示两个集合的对称差,返回只在其中一个集合出现的那些值。
- Accuracy, Precision, Recall, F值(单标签学习中准确率,精准率,召回率,F值的天然拓展)
- One-error(度量的是:“预测到的最相关的标签” 不在 “真实标签”中的样本占比。值越小,表现越好)
- Coverage(度量的是:“排序好的标签列表”平均需要移动多少步,才能覆盖真实的相关标签集)
其中$ rank_f(x^i, y_j) $ 表示用\(f(\cdot, \cdot)\) 对\(Y\)中的所有标签(注意是对\(Y\)中所有标签)进行降序排序,给个排名,最后返回的是\(y_j\)标签在这个排序列表中的一个排名,排名越大,相关性越小。而 \(\mathop {max}\limits_{y_j \in y^i}\)表示取到,真实标签\(y^i\)中的标签在上面这个排名中最大的,那个排名。
如果真实标签\(y^i\)被完全预测正确的话,取到的值是$\left | y^i \right | \(,\)y^i\(中的排名就是从1到\)\left | y^i \right | \(。
如果\)y^i\(中有一个标签\)y_j\(没有被预测正确,那么取的值就是那个标签\)y_j\(在\)Y\(中的排名,因为预测正确的那些都是排名最小(相关性最大)的那些标签,这个\)y_j\(肯定是大于\)\left | y^i \right | $的。
- Ranking Loss(度量的是:反序标签对的占比,也就是不相关标签比相关标签的相关性还要大的情况)
其中\(\overline{y^i}\)为\(y^i\)在\(Y\)上的补集。\(y_{j1}\)从相关的标签集\(y^i\)中取,\(y_{j2}\)从不相关的标签集$ \overline{y^i}$中取,两两组合形成标签对。
- Average Precision(度量的是:比特定标签更相关的那些标签的排名的占比)
基于标签的评价指标
- Macro-averaging
- Micro-averaging
其中\(TP_j,\;FP_j,\; TN_j,\; FN_j\)为单个标签下传统二分类的四个数量特征,真正例,假正例,真负例,假负例。
$B \in { Accuracy, Precision, Recall, F^\beta } $ 表示对四个数量特征进行相关运算得到常规的二分类指标。
macro是先对单个标签下的数量特征计算得到常规指标,再对多个标签取平均。
micro是先对多个标签下的数量特征取平均,再根据数量特征计算得到常规指标。
- AUC-macro(度量的是:“排序正确”的数据对的占比,macro是先对单个标签计算,再平均)
(这里的“排序正确”指的是根据\(f(\cdot,\cdot)\)函数,对于相关标签的打分会大于不相关标签的打分
其中\(Z_j = \{x^i \;|\; y_j \in y^i, 1 \leq i \leq p \}\)表示的是含有\(y_j\)标签的样本数量
其中\(\overline{Z_j} = \{x^i \;|\; y_j \notin y^i, 1 \leq i \leq p \}\)表示的是不含\(y_j\)标签的样本数量。
- AUC-micro(度量的是:“排序正确”的数据对的占比,micro是直接把多个标签考虑在内来计算占比)
其中\(S^+= \{(x^i, y_j) \;|\; y_j \in y^i, 1 \leq i \leq p \}\)表示的是相关的样本标签对
其中\(S^- = \{(x^i, y_j) \;|\; y_j \notin y^i, 1 \leq i \leq p \}\)表示的是不相关的样本标签对
学习算法
可分为两类(具体算法如下图所示)
- 问题转换的方法:把多标签问题转为其它学习场景,比如转为二分类,标签排序,多分类
- 算法改编的方法:通过改编流行的学习算法去直接处理多标签数据,比如改编懒学习,决策树,核技巧。
![]()
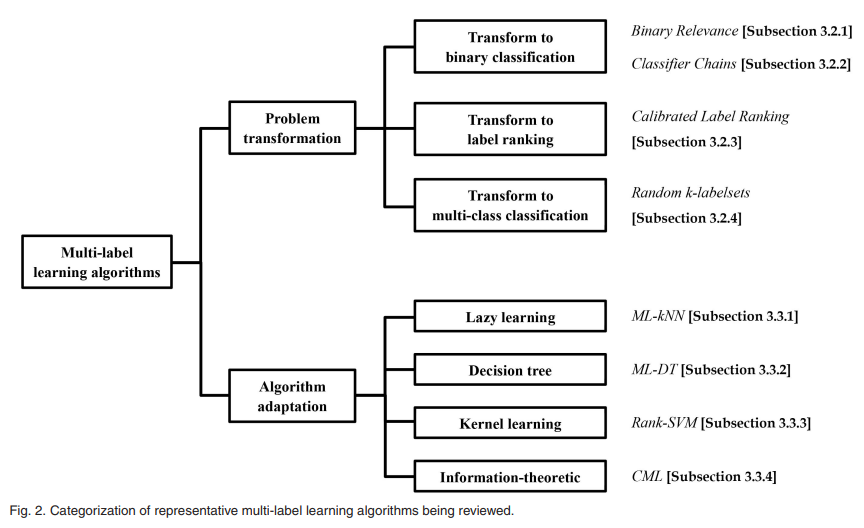
下面对图中的每个算法进行介绍。
Binary Relevance
把多个标签分离开来,对于q个标签,建立q个数据集和q个二分类器来进行预测。
这是最简单最直接的方法,是其它先进的多标签算法的基石。
没有考虑标签之间的关联性,是一个一阶策略(first-order)
Classifier Chains
首先按特定的顺序(这个顺序是自己决定的)对q个标签排个序,得到\(y_{\tau(1)}\succ y_{\tau(2)} \succ ...\succ y_{\tau(q)}\)。对于第j个标签\(y_{\tau(j)}\)构建一个二分类的数据集
第j个标签构建的二分类数据集中,\(x^i\)会concat上前j-1个标签值。
以这样chain式的方法构建q个数据集,训练q个分类器。
在预测阶段,由于第j个分类器需要用到前j-1个分类器预测出的标签集,所以需要顺序调用这q个分类器来预测。
- 显然算法的好坏会受到顺序\(\tau\)的影响,可以使用集成的方式,使用多个随机序列,对每个随机序列使用一部分的数据集进行训练。
- 虽然该算法把问题分解成多个二分类,但由于它以随机的方式考虑了多个标签之间的关系,所以它是一个高阶策略(high-order)。
- 该算法的一个缺点是丢失了平行计算的机会,因为它需要链式调用来进行预测
Calibrated Label Ranking
算法的基本思想是把多标签学习问题转为标签排序问题,该算法通过“成对比较”来实现标签间的排序。
对q个标签,可以构建q(q-1)/2个标签对,所以可以构建q(q-1)/2个数据集。
- 只有带有不同相关性的两个标签\(y_j\)和\(y_k\)的样本才会被包含在数据集\(D_{jk}\)中,用该数据集训练一个分类器,当分类器返回大于0时,样本属于标签\(y_j\),否则属于标签\(y_k\)。
- 可以看到,每个样本\(x^i\)会被包含在\(\left | y^i \right | \left | \overline{y^i} \right |\)个分类器中。
- 在预测阶段,根据分类器,每个样本和某个标签会产生一系列的投票,根据投票行为来做出最终预测。
- 前面构造二分类器的方法使用one-vs-rest的方式,本算法使用one-vs-one,缓和类间不均衡的问题。
- 缺点在于复杂性高,构建的分类器个数为q(q-1)/2,表现为二次增长。
- 考虑两个标签之间的关联,是二阶策略(second-order)
Random k-Labelsets
算法的基本思想是把多标签学习问题转为多分类问题。把\(2^q\)个可能的标签集,映射成\(2^q\)个自然数。
映射函数记为\(\sigma _Y\),则原数据集变为\(D^+_Y = \{ (x^i, \sigma_Y(y^i)) \ | \ 1 \leq i \leq m \}\)。
所对应的新类别记为 $ \Gamma(D^+_Y) = { \sigma_Y(y^i) \ | \ 1 \leq i \leq m}\(,显然\) \left | \Gamma(D^+_Y) \right | \leq min(m, 2^{|Y|})$。
这样来训练一个多分类器,最后根据输出的自然数映射回标签集的算法称为LP(Label Powerest)算法,它有两个主要的局限性
- LP预测的标签集是训练集中已经出现的,它没法泛化到未见过的标签集
- 类别太大,低效
为了克服LP的局限性,Random k-Labelsets使用的LP分类器只训练Y中的一个长度为k的子集,然后集成大量的LP分类器来预测。
\(Y^k\)表示\(Y\)的所有的长度为k的子集,\(Y^k(l)\)表示随机取的一个长度为k的子集,这样就可以进行收缩样本空间,得到如下样本集和标签集。
更进一步,我们随机取n个这样的子集:\(Y^k(l_r), 1 \leq r \leq n\)来构造n个分类器做集成。
最后预测的时候需要计算两个指标,一个为标签j能达到的最大投票数,一个为实际投票数。
其中$ \sigma_{Yk(l)}(\cdot)\(表示从自然数映射回标签集的函数,\)g^+(\cdot)$表示分类器学习到的函数。最后预测的时以0.5为阈值进行预测,得到标签集。
因为是随机长度为k的子集,考虑了多个标签之间的相关性,所以是高阶策略(high-order)。
Multi-Label k-Nearest Neighbor(ML-KNN)
用\(N(x)\)表示x的\(k\)个邻居,则\(C_j = \sum_{(x,y) \in N(x)} 1\{y_j \in y\}\)表示样本x的邻居中带有标签\(y_j\)的邻居个数。 用\(H_j\)表示样本x含有标签\(y_j\),根据后验概率最大化的规则,有
根据贝叶斯规则,有
先验概率\(P(H_j), P(\urcorner H_j)\)可以通过训练集计算得到,表示样本带有或不带有标签\(y_q\)的概率
其中s是平滑因子,s为1时则使用的是拉普拉斯平滑。
条件概率的计算需要用到两个值
\(\kappa_j[r]\)表示“含有标签\(y_j\)而且r个邻居也含有标签\(y_j\)的”样本的个数。
\(\tilde{\kappa}_j[r]\)表示“不含有标签\(y_j\)但是r个邻居含有\(y_j\)的”样本的个数。
根据这两个值,可以计算相应的条件概率
这两个条件概率表示的是,样本带有或不带有标签\(y_j\)的条件下,它有\(C_j\)个邻居带有标签\(y_j\)的概率。
- 由上述的条件概率,先验概率则可以根据贝叶斯规则和后验概率最大化,计算出样本的标签集
- 需要注意的是该方法不是KNN和独立二分类的简单结合,因为算法中还使用了贝叶斯来推理邻居信息
- 没有考虑标签之间的相关性,是一阶策略(first-order)
Multi-Label Decision Tree(ML-DT)
使用决策树的思想来处理多标签数据,数据集T中,使用第l个特征,划分值为\(\vartheta\),计算出如下信息增益:
递归地构建一颗决策树,每次选取特征和划分值,使得上式的信息增益最大。
其中式子中的熵的公式可以按如下计算(为了方便计算,假定标签之间独立)。
- 新样本到来时,向下遍历决策树的结点,找到叶子结点,若\(p_j\)大于0.5则表示含有标签\(y_j\)
- 该算法不是决策树和独立二分类的简单结合(如果是的话,应该构建q棵决策树)
- 没有考虑标签的相关性,是一阶策略(first-order)
Ranking Support Vector Machine(Rank-SVM)
使用最大间隔的思想来处理多标签数据。
Rank-SVM考虑系统对相关标签和不相关标签的排序能力。
考虑最小化\(x^i\)到每一个“相关-不相关”标签对的超平面的距离,来得到间隔。
像SVM一样对w和b进行缩放变换后可以对式子进行改写,然后最大化间隔,再调换分子分母进行改写,得到:
为了简化,用sum操作来近似max操作
跟SVM一样,为了软间隔最大化,引入松弛变量,得到下式:
其中\(\Xi = \{ \xi_{ijk} \ | \ 1 \leq i \leq m, \ (y_i,y_k) \in y^i \times \overline{y^i} \}\)
- 跟SVM一样,最终的式子是一个二次规划问题,通常调用现有的包来解。
- 对于非线性问题则使用核技巧来解决。
- 由于定义了”相关-不相关“标签对的超平面,这是个二阶策略(second-order)
Collective Multi-Label Classifier(CML)
该算法的核心思想最大熵原则。用\((x,y),\)表示任意的一个多标签样本,其中\(y = (y_1, y_2, ..., y_q) \in \{-1, +1\}^q\)。
算法的任务等价于学习一个联合概率分布\(p(x,y)\),用\(H_p(x,y)\)表示给定概率分布\(p\)时\((x,y)\)的信息熵。
最大熵原则认为熵最大的模型是最好的模型。
其中\(f_k(x,y)\)是一个特征函数,描述\(x\)和\(y\)之间的一个事实\(k\),满足这个事实时返回1,否则返回0。
约束做的是希望这个分布上,特征函数的期望能够等于一个我们希望的值\(F_k\),这个值通常通过训练集来估计。
解这个优化问题,会得到
其中\(\Lambda = \{ \lambda_k | k \in K \}\)表示一系列的权重。$Z_{\Lambda} = \sum_y exp(\sum_{k \in K} \lambda_k \cdot f_k(x,y)) \(作为规范化因子。 假设有一个高斯先验\)\lambda_k \sim N(0, \varepsilon^2)\(,就可以通过最大化以下这个log后验概率来求得参数\)\Lambda$。
- 这是个凸函数,可以调用现成的无约束优化方法比如BFGS直接求解。求得参数就可以得到要学习的概率分布\(p(y|x)\)。
- 对于一系列约束K,分为两个部分
- \(K_1 = \{ (l,j) | 1 \leq l \leq d, 1 \leq j \leq q\}\),有\(d \cdot q\)个约束,特征函数为
- $K_2 = { (j_1, j_2, b_1, b_2) | 1 \leq j_1 < j_2 \leq q, \ \ b_1, b_2 \in { -1, +1 } } $,有\(4 \cdot \binom{q}{2}\)个约束,特征函数为
- 由于K约束中考虑了标签对之间的关联,该算法是个二阶策略(second-order)。
相关任务
- 多实例学习(Multi-instance learning):每个样本由多个实例和一个标签组成,多个实例中至少一个为正,认为该样本为正。和多标签学习的输出空间模糊相反,多实例学习是输入空间模糊。
- 有序分类(Ordinal classification):对于每个标签,不再是简单地判断是还是否,而是改成一系列的等级排序,把\(y_j = \{-1,+1\}\)替换成\(y_j = \{m_1, m_2, ..., m_k\}, \ where \ m_1 < m_2 < ... < m_k\)
- 多任务学习(Multi-task learning):同时训练多个任务,相关任务之间的训练信息会帮助其它任务。比如目标定位既要识别有没有目标(分类问题)又要定位出目标的位置(回归问题)。
- 数据流学习(Data streams classification):真实世界的目标是在线生成和实时产生的,如何处理这些数据就是数据流学习要做的事。一个关键的挑战就是“概念漂移”(目标变量的统计特性随着时间的推移以不可预见的方式变化),一般处理方式有:当一大批新数据到来时更新分类器;维持一个检测器来警惕概念漂移;假定过去数据的影响会随着时间而衰减。
总结
- 论文主要介绍了多标签学习的一些概念定义,策略,评价指标,以及8个有代表性的算法,其中对多种评价指标和多个算法都做了清晰的分类和详细的阐述。
- 尽管挖掘标签关联性的想法被应用到许多算法中,但是仍然没有一个正式的机制。有研究表示多标签之间的关联可能是非对称的(我对你的影响和你对我的影响是不同的),局部的(不同样本之间的标签相关性不同,很少关联性是所有样本都满足的)。
- 但是不管怎么说,充分理解和挖掘标签之间的相关性,是多标签学习的法宝。尤其是巨大输出空间场景下。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号