

相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定
刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机,
要知道如何查看节点之间的流程图 rosrun rqt_graph rqt_graph ,如何查看我们运行的节点 rosnode list, 查看运行的话题 rostopic list 或者rostopic list -v 查看每个节点的性质
首先需要学习的是 wiki.ros.org/cv_bridge/Tutorials/UsingCvBridgeToConvertBetweenROSImagesAndOpenCVImages
了解cv_bridge 这个程序包是连接ROS和Opencv的程序包,就好像是一个桥梁的作用一样,关系图:

紧接着可以学习 wiki.ros.org/image_common?distro=indigo 这个就是就是教你如何去订阅和发布图像或者视频的话题等问题
那么其中功能最多的就是 wiki.ros.org/image_pipeline?distro=indigo 这个程序包里面就有我们想要的相机标定的程序以及方法
同时最重要的是 要驱动摄像头安装包就在于 wiki.ros.org/image_pipeline?distro=indigo 这里我用的是USB 的就可以对应下载该程序包然后
catkin_make一下就可以驱动摄像头,可以看到原始图像,运行看到的结果:
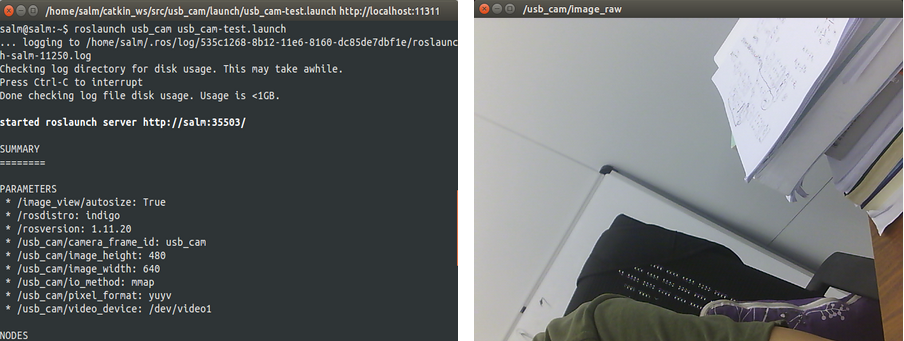
顺利的启动摄像头就可以学习如何去标定相机了
因为就是用别人的代码也没什么改动,所以直接下载所提及的程序包,然后catkin_make
一般都不会有什么错误出现,命令窗口执行
$ roscore
$ roslaunch usb_cam usb_cam-test.launch (可以在.launch文件里修改要用的摄像头,比如笔记本的摄像头是/dev/video0,外接USB摄像头是/dev/video1)
$ rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.035 image:=/usb_cam/image_raw camera:=/usb_cam
(这里的标定模板我是用A3纸张打印出来,为8*6 35mm的标定棋盘)
所以 参数要改为与实际标定模板一致的数据 --size 8x6 --square 0.035
image:=/usb_cam/image_raw camera:=/usb_cam 就是要对应USB 摄像头的原始的节点和话题(我就刚开始没有对上号)
(完全按照网上的步骤来是不会出现想要的结果的)
我们可以使用 rosrun rqt_graph rqt_graph 来查看是否calibraton节点是否已经订阅成功如图:(倘若cameracalibrator与usb_cam没有订阅成功,就需要使用
rostopic list -v 查看话题)
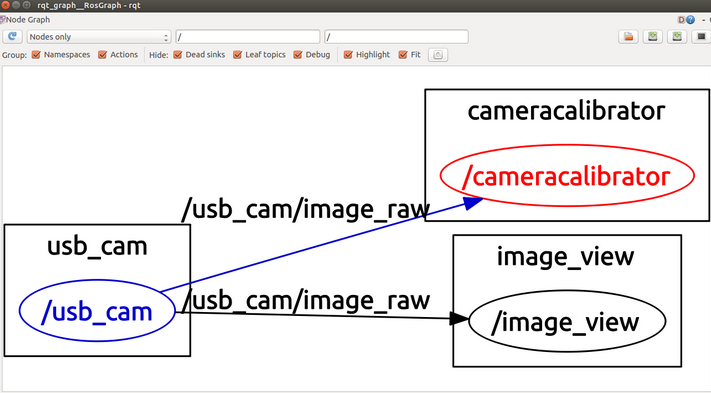
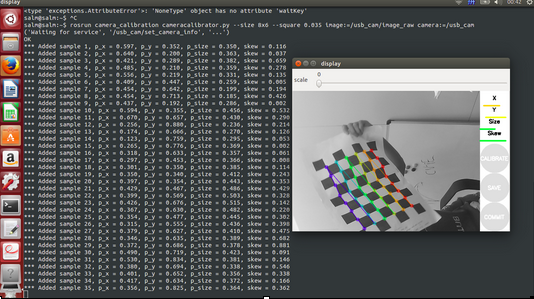
运行的结果 如图
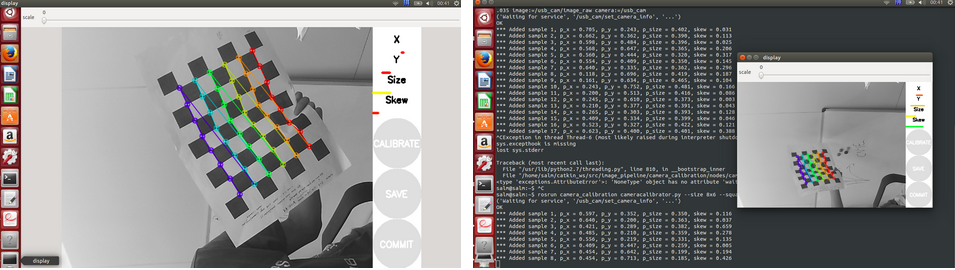
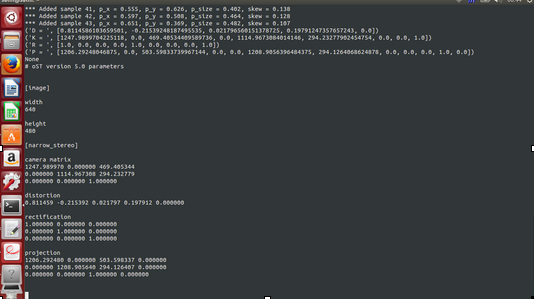
直到采集了50个采样点 左边的CALIBRATE变为绿色 就可以点击开始标定,结束后会将标定结果打印到命令窗口:
后续还有很多内容可以写上去,暂时就到这里
(大神请忽略,谢谢)

