P2 价值学习
Deep Q-Network(DQN)
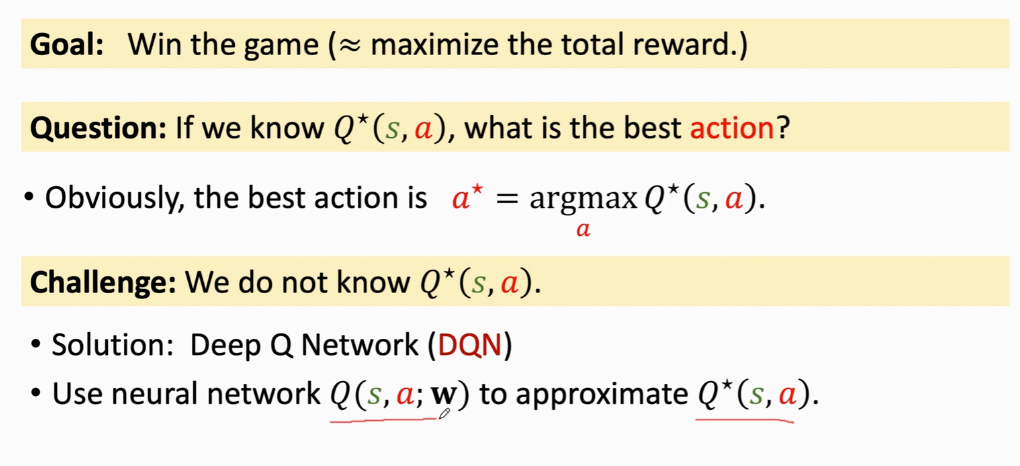
\[对于一个游戏来说,我们的目标是为了赢得游戏(也就相当于是要去找到一个最大的总和奖励\\那么现在的目标有了,问题就是如果我们知道一个Q^*函数,应该如何做决策,也就是如何找到\\最优的动作\\
但实际上,我们在开始是不知道Q^*的 因此我们的解决方法是 DQN网络\\
我们对于Q(s,a;w)来说,w是神经网络的输入 s表示输出的数值 a是选择的动作\\
我们通过不断的训练来让这个Q函数不断地接近Q^*函数 也就是我们最后得到的最优解
\]
例如:

对于超级玛丽的游戏,我们可以对于当前的情况画面来作为输入,通过一个卷积层来将输入转化为特征向量,然后再通过一个连接层将图片映射成突出的向量(即对于每个动作的打分,即对于上面的Q(s,a;w)
如何训练DQN ? 常用的算法就是
Temporal Difference(TD)learning——时序差分学习

例子:
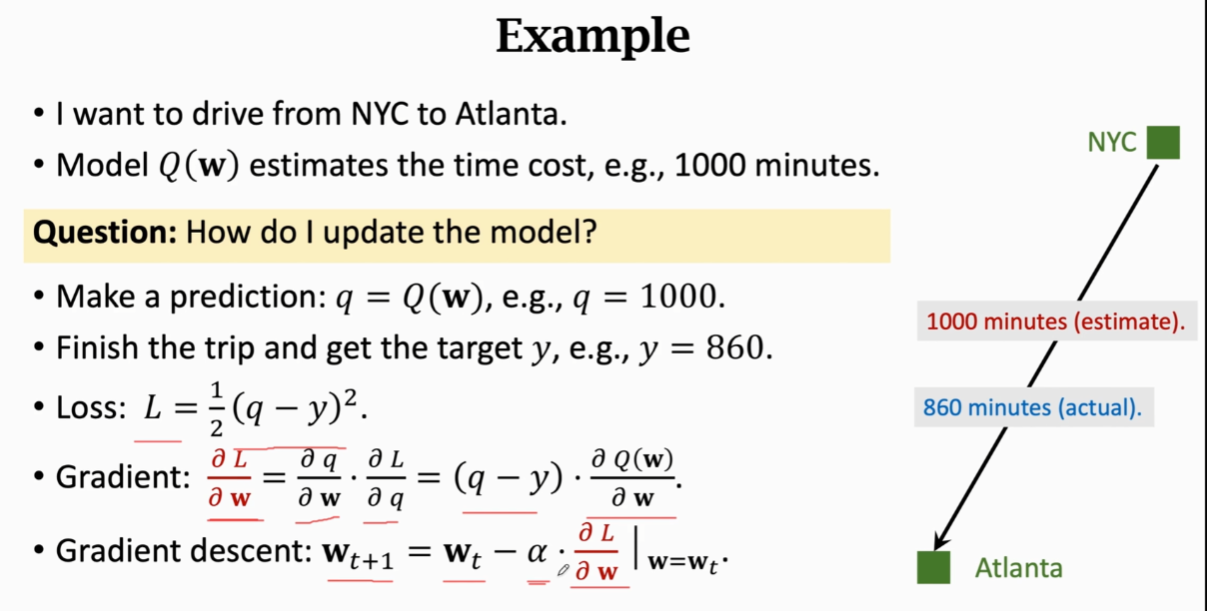
\[实际问题:从纽约出发去亚特兰大 \\
初始:模型Q(w)提示全程需要1000分钟\\
问:怎样更新模型Q来得到更加精确的时间\\
过程:1.开始模型Q(w)给出当前预测值 q=1000\\
2.实际过程旅行完花费860分钟 target y=860 \\
3.我们假定损失函数:L=1/2(q-y)^2 \\
4.我们用L对w求导 如上图所示 \\
5.梯度出来之后 我们可以用梯度下降来更新下一次的w_{t+1} \ \ 其中α是学习率或者步长 \\
通过梯度下降得到的预测值w_{t+1}更加接近实际情况 因为他通过梯度下降减少了损失函数\\
缺点:这种算法比较难应付\ 因为每一次都需要完成全部的旅行才能对模型更新一次\
\]
进阶:能否不需要完成全部旅行,即完成部分旅行就可以进行一次模型的更新
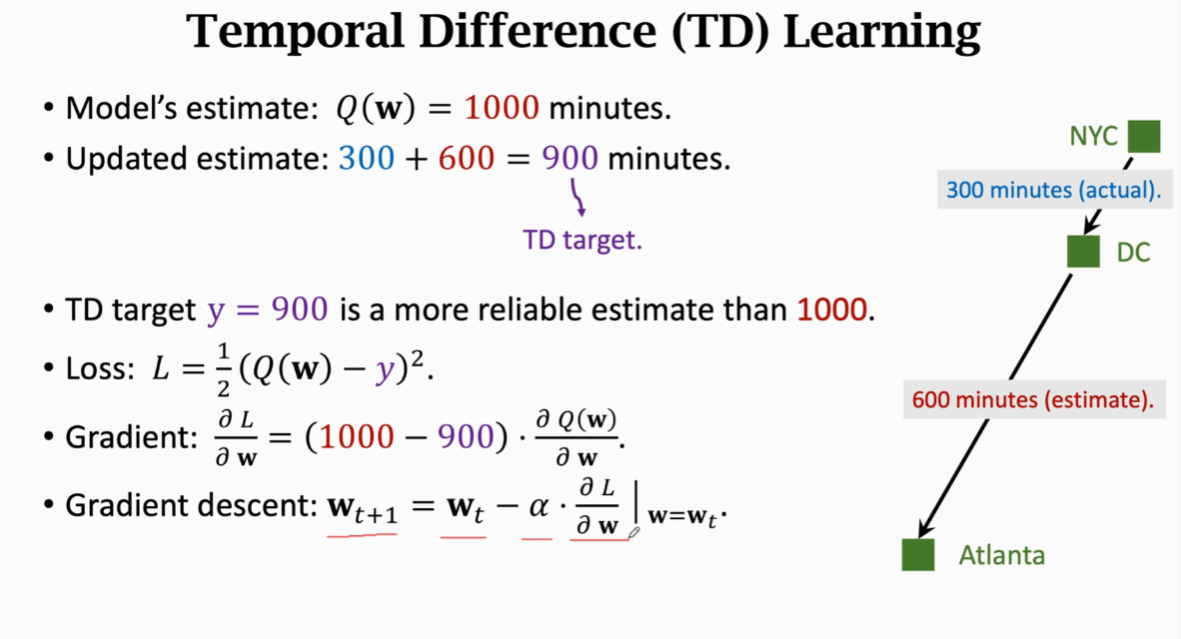
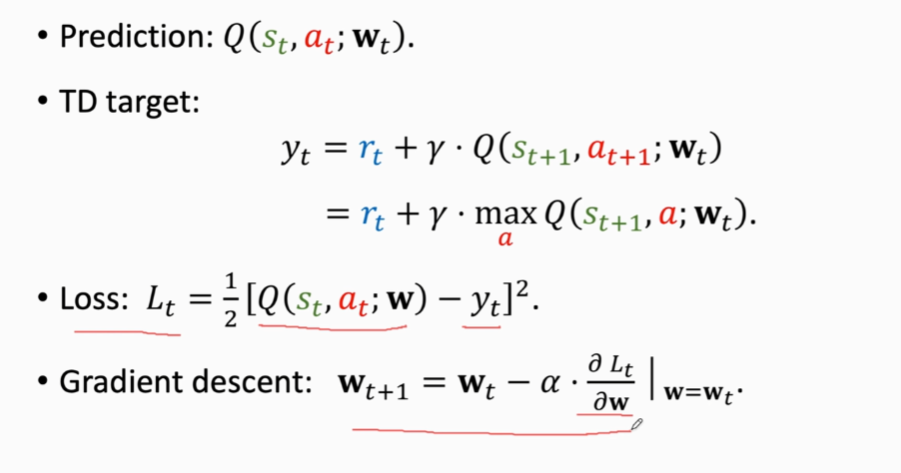
\[现在 假设从纽约城出发去亚特兰大,中途到达华盛顿的时候花费了300分钟\\然后这个时候出了故障需要短暂调整,此时模型告诉我们\ 从华盛顿到亚特兰大需要600分钟\\
此时,我们之前花费的300+预测的600=900分钟 这比模型刚开始预测的1000分钟\\来说,要更加的精准一点\ 此时这个900\ 我们就称为TD\ target\\
此时的损失函数和梯度下降结算下一次的W_{t+1}如上所示
\]

TD算法的目标就是为了让TD error接近0 0也就意味着实际时间和预测时间相等,所以TD算法要用梯度下降来减少TD error
现在将例子转化到深度强化学习思想中:
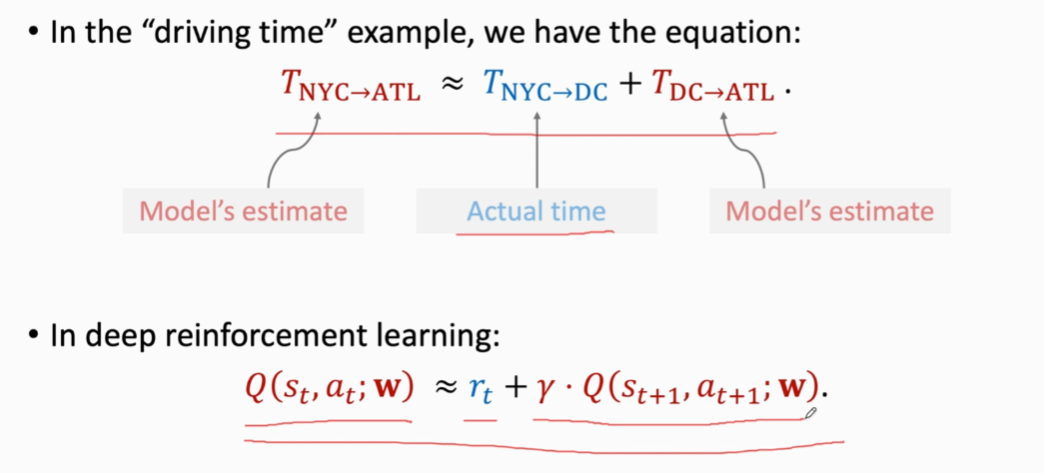
\[在上述这个驾驶时间的例子中,我们可以提炼出一个等式\\
T_{NYC→ATL}≈T_{NYC→DC}+T_{DC→ATL}\\
这个式子包含三部分,第一部分是模块第一次预测的时间,第二部分是真实时间,\\第三部分则是第二次预测的接下来路程的时间\\
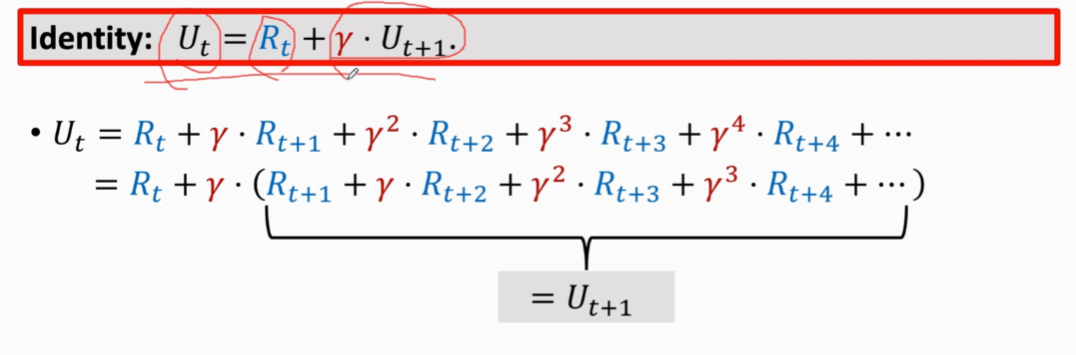
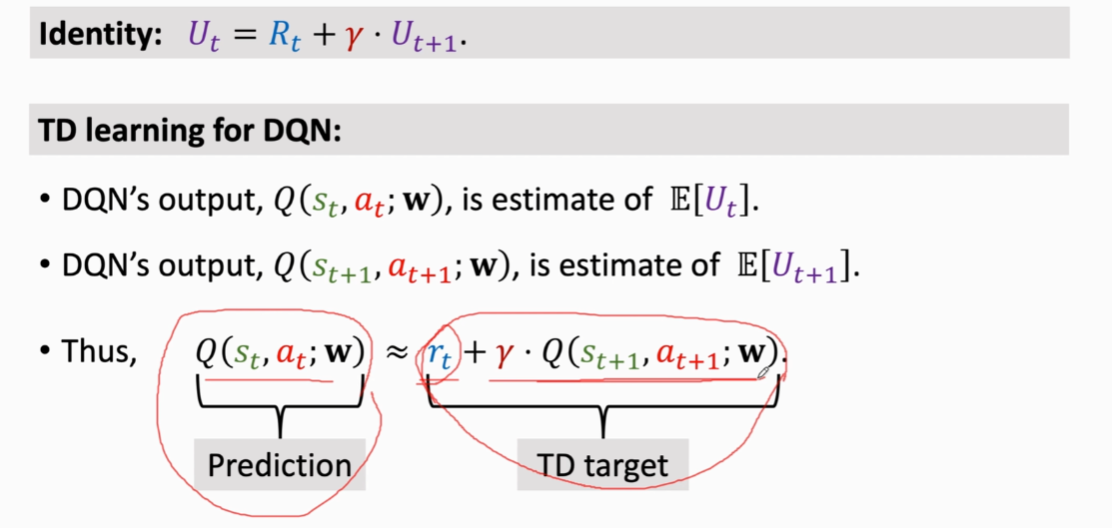
由此类比到深度强化学习中就得到了后面这个等式(或者说一个重要等式)\\
Q(S_t,a_t;w)≈r_t+γ*Q(s_{t+1},a_{t+1};w)\\
核心就是等式包含两个预测值和一个真实值
\]
证明,之前的折扣回报,推导如下:
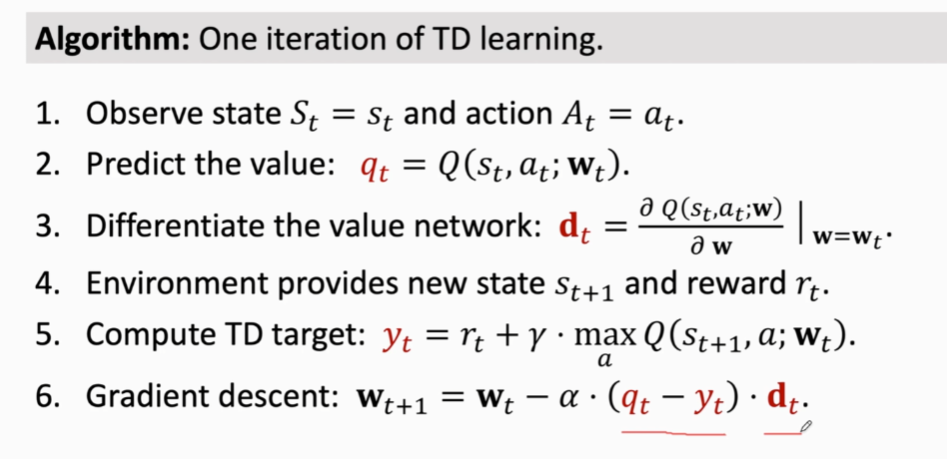
总结 TD算法的过程如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号