
OpenCV图像旋转
图像旋转是指图像按照某个位置转动一定角度的过程,旋转中图像仍保持这原始尺寸。图像旋转后图像的水平对称轴、垂直对称轴及中心坐标原点都可能会发生变换,因此需要对图像旋转中的坐标进行相应转换。
如下图:
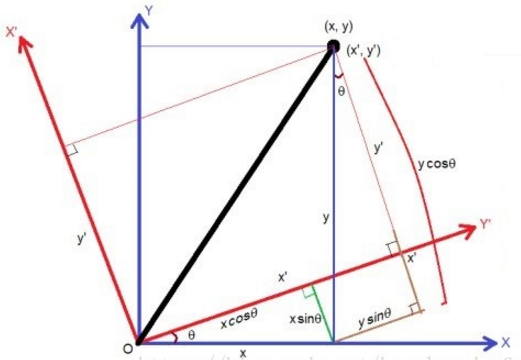
假设图像逆时针旋转\(\theta\),则根据坐标转换可得旋转转换为:
\[ \begin{cases}
x' = r\cos(\alpha - \theta)\\
y' = r\sin(\alpha - \theta)\tag{1}
\end{cases}\]
而
\[r = \sqrt{x^2 + y^2},
\sin\alpha = \frac{y}{\sqrt{x^2 + y^2}},
\cos\alpha = \frac{x}{\sqrt{x^2 + y^2}}\]
带入(1)可得:
\[ \begin{cases}
x' = x\cos\theta + y\sin\theta\\
y' = -x\sin\theta + y\cos\theta
\end{cases}\]
即如下:
\[ \begin{bmatrix}
x'&y'& 1
\end{bmatrix} \
=
\begin{bmatrix}
x &y &1
\end{bmatrix} \
\begin{bmatrix}
\cos\theta & -\sin\theta & 0 \\
\sin\theta & \cos\theta &0 \\
0 & 0 & 1\tag{2}
\end{bmatrix}\]
而旋转后的图片的灰度值等于原图中相应位置的灰度值如下:
\[f(x', y') = f(x, y)
\]
同时我们要修正原点的位置,因为图像中的坐标原点在图像的左上角,经过旋转后图像的大小会有所变化,原点也需要修正。实现代码如下:
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <string>
#include <cmath>
using namespace cv;
Mat imgRotate(Mat matSrc, float angle, bool direction)
{
float theta = angle * CV_PI / 180.0;
int nRowsSrc = matSrc.rows;
int nColsSrc = matSrc.cols;
// 如果是顺时针旋转
if (!direction)
theta = 2 * CV_PI - theta;
// 全部以逆时针旋转来计算
// 逆时针旋转矩阵
float matRotate[3][3]{
{std::cos(theta), -std::sin(theta), 0},
{std::sin(theta), std::cos(theta), 0 },
{0, 0, 1}
};
float pt[3][2]{
{ 0, nRowsSrc },
{nColsSrc, nRowsSrc},
{nColsSrc, 0}
};
for (int i = 0; i < 3; i++)
{
float x = pt[i][0] * matRotate[0][0] + pt[i][1] * matRotate[1][0];
float y = pt[i][0] * matRotate[0][1] + pt[i][1] * matRotate[1][1];
pt[i][0] = x;
pt[i][1] = y;
}
// 计算出旋转后图像的极值点和尺寸
float fMin_x = min(min(min(pt[0][0], pt[1][0]), pt[2][0]), (float)0.0);
float fMin_y = min(min(min(pt[0][1], pt[1][1]), pt[2][1]), (float)0.0);
float fMax_x = max(max(max(pt[0][0], pt[1][0]), pt[2][0]), (float)0.0);
float fMax_y = max(max(max(pt[0][1], pt[1][1]), pt[2][1]), (float)0.0);
int nRows = cvRound(fMax_y - fMin_y + 0.5) + 1;
int nCols = cvRound(fMax_x - fMin_x + 0.5) + 1;
int nMin_x = cvRound(fMin_x + 0.5);
int nMin_y = cvRound(fMin_y + 0.5);
// 拷贝输出图像
Mat matRet(nRows, nCols, matSrc.type(), Scalar(0));
for (int j = 0; j < nRows; j++)
{
for (int i = 0; i < nCols; i++)
{
// 计算出输出图像在原图像中的对应点的坐标,然后复制该坐标的灰度值
// 因为是逆时针转换,所以这里映射到原图像的时候可以看成是,输出图像
// 到顺时针旋转到原图像的,而顺时针旋转矩阵刚好是逆时针旋转矩阵的转置
// 同时还要考虑到要把旋转后的图像的左上角移动到坐标原点。
int x = (i + nMin_x) * matRotate[0][0] + (j + nMin_y) * matRotate[0][1];
int y = (i + nMin_x) * matRotate[1][0] + (j + nMin_y) * matRotate[1][1];
if (x >= 0 && x < nColsSrc && y >= 0 && y < nRowsSrc)
{
matRet.at<Vec3b>(j, i) = matSrc.at<Vec3b>(y, x);
}
}
}
return matRet;
}
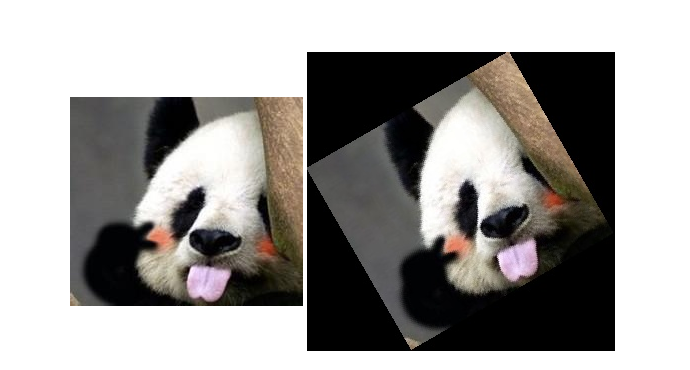
测试代码:
int main()
{
std::string strPath = "D:\\MyDocuments\\My Pictures\\OpenCV\\";
Mat matSrc = imread(strPath + "panda.jpg");
if (matSrc.empty())
return 1;
float angle = 30;
Mat matRet = imgRotate(matSrc, angle, true);
imshow("src", matSrc);
imshow("rotate", matRet);
// 保存图像
imwrite(strPath + "rotate_panda.jpg", matRet);
waitKey();
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号