第四节:定时器中断及定时器产生PWM(用CubeMX学习STM32)
定时器中断及定时器产生PWM
《用CubeMX学习STM32》
注释 点击上面蓝字进入完整专栏,这个系列所有文章都会整合到这个专栏
4、STM32定时器中断以及定时器PWM
前言: STM32定时器概述
我演示用的STM32F407ZGt6的核心板有多达14个定时器; 其中包含两个高级定时器(TIM1和TIM8); 十个通用定时器(TIM2~TIM5, TIM9~TIM14); 两个基础定时器(TIM6、TIM7)。
Tips: 在十个通用定时器里面包含两个看门狗定时器(two watchdog timers)
下面是datasheet里面官方给出的介绍
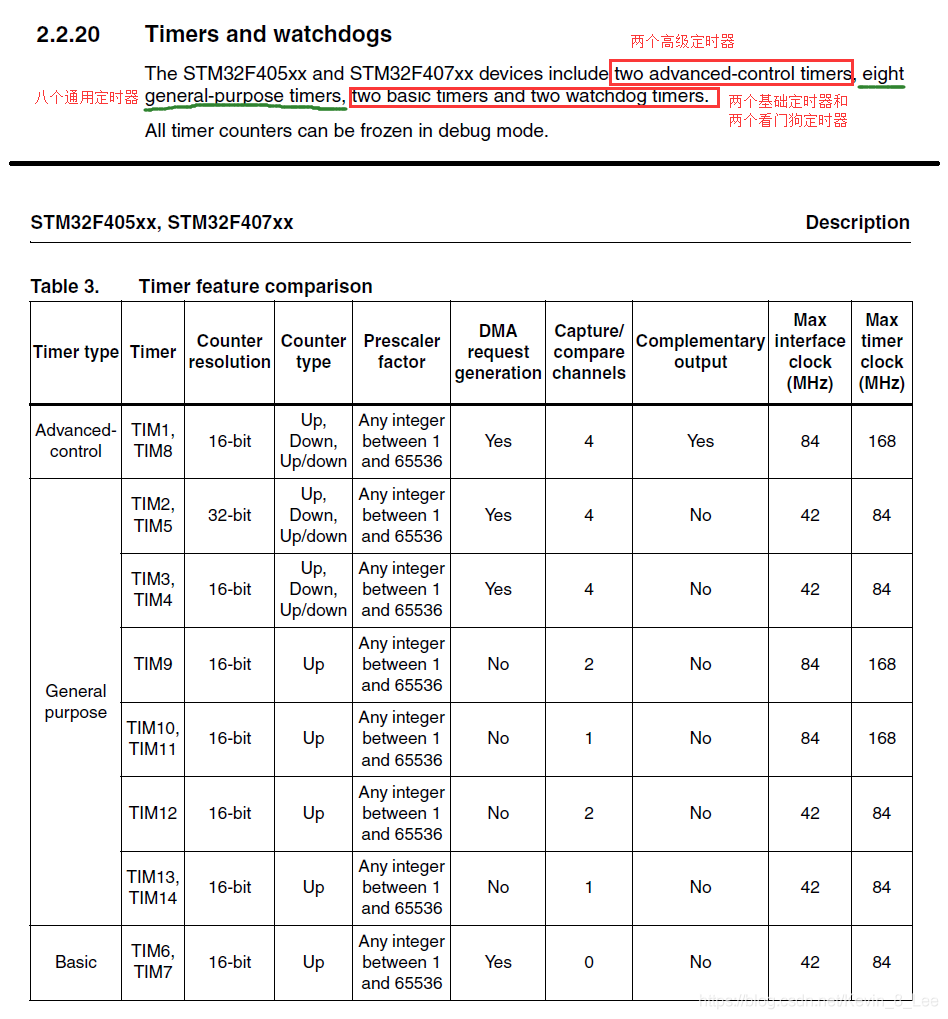
Couter resolution—> 计数器位数, 位数越高精度越高;
Counter type —> 计数类型 即向上计数还是向下计数
Prescaler factor —> 分频因子, 对时钟的分频, 比如单片机的时钟为84MHz, 预分频系数为4的话, 那定时器的计数器所能用的的就是21MHz了
本文以用的比较多的通用定时器介绍, 用TIM3;
(1)主要涉及到的寄存器为
- 计数器寄存器 (TIMx_CNT)
- 预分频器寄存器 (TIMx_PSC)
- 自动重载寄存器 (TIMx_ARR)
![在这里插入图片描述]()
太细致的寄存器相关的就不扯了, 看了也是忘, 多用自然会了然于心

(2)关于计数模式
以向上计数为例:
计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。 我们可以在这个溢出事件进入中断, 只要使能中断, 那么溢出事件这个点就会进入中断, 我们只要在中断服务函数中写自己要做的功能, 这就是定时器中断了
溢出时间计算
Tout = ((ARR + 1)*(PSC + 1)) / Tclk
Tout: 溢出时间(us); Tclk: 定时器的输入时钟频率(MHz); ARR和PSC的值都在1~65535这个范围
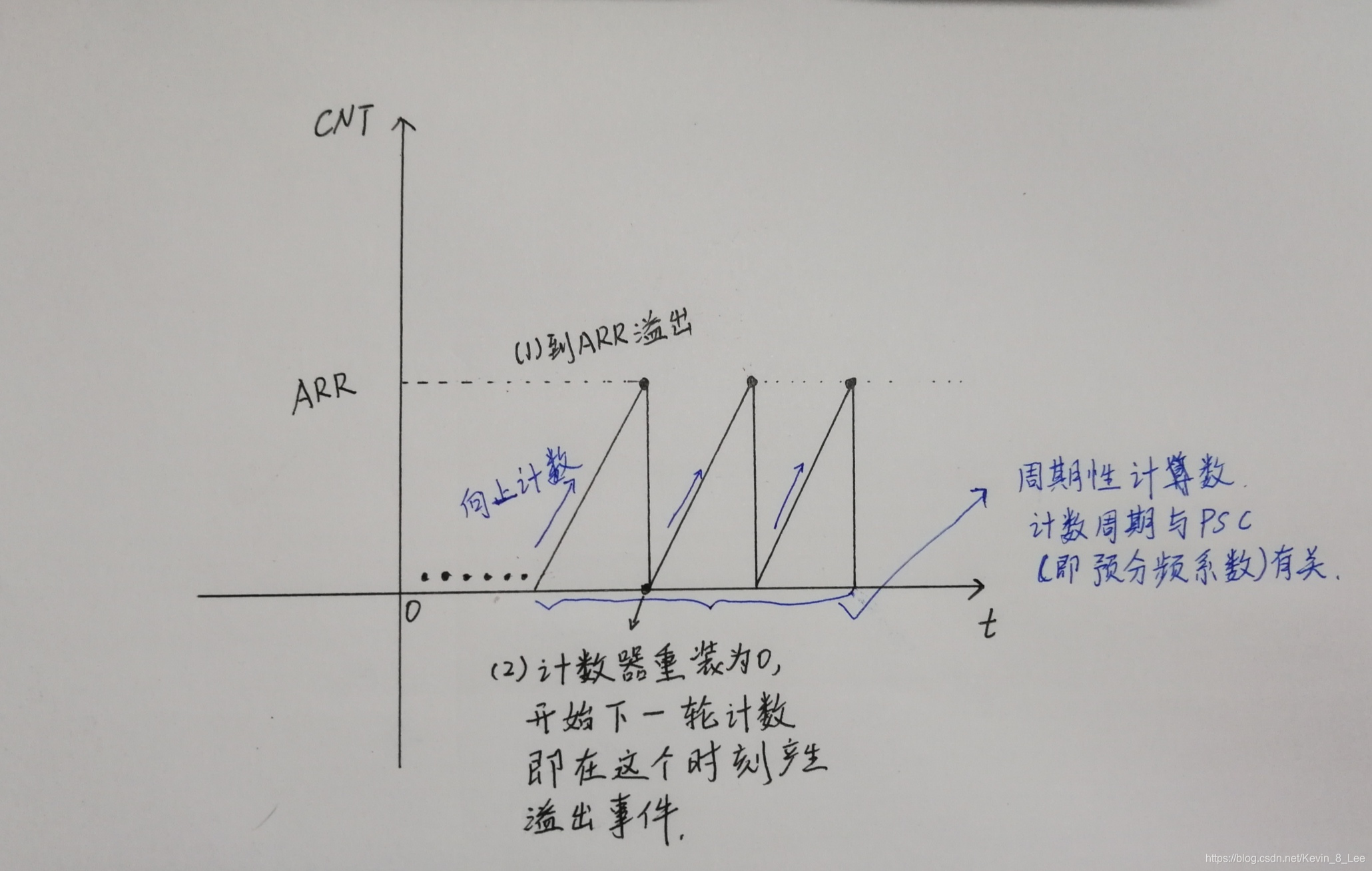
如图中所示, PSC(预分频系数)决定计数周期, ARR(自动重装载值) 确定那个时刻发生溢出
下面开始Cube配置+IAR编程
4.1 操作简介
(1) 定时器中断, 在中断中做点灯操作。使用向上计数模式; 每 200ms LED0翻转一次
(2) 定时器产生PWM
4.2 定时器中断
在主函数的while(1) 里面我们什么都不做, 只在中断里面让LED闪烁。
Step1 : Cube配置
-
(1) 新建工程
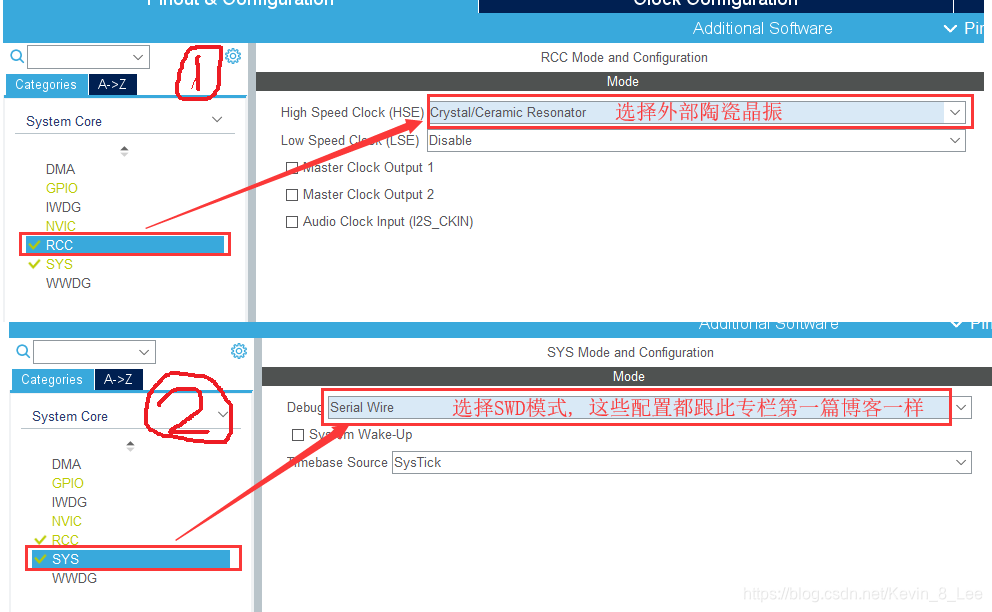
在新建的工程里面这一次先配置时钟树, 因为我们需要先配置好时钟频率然后计算定时器参数。- tips: 配置时钟树之前别忘了先把RCC和SYS勾选好
![在这里插入图片描述]()
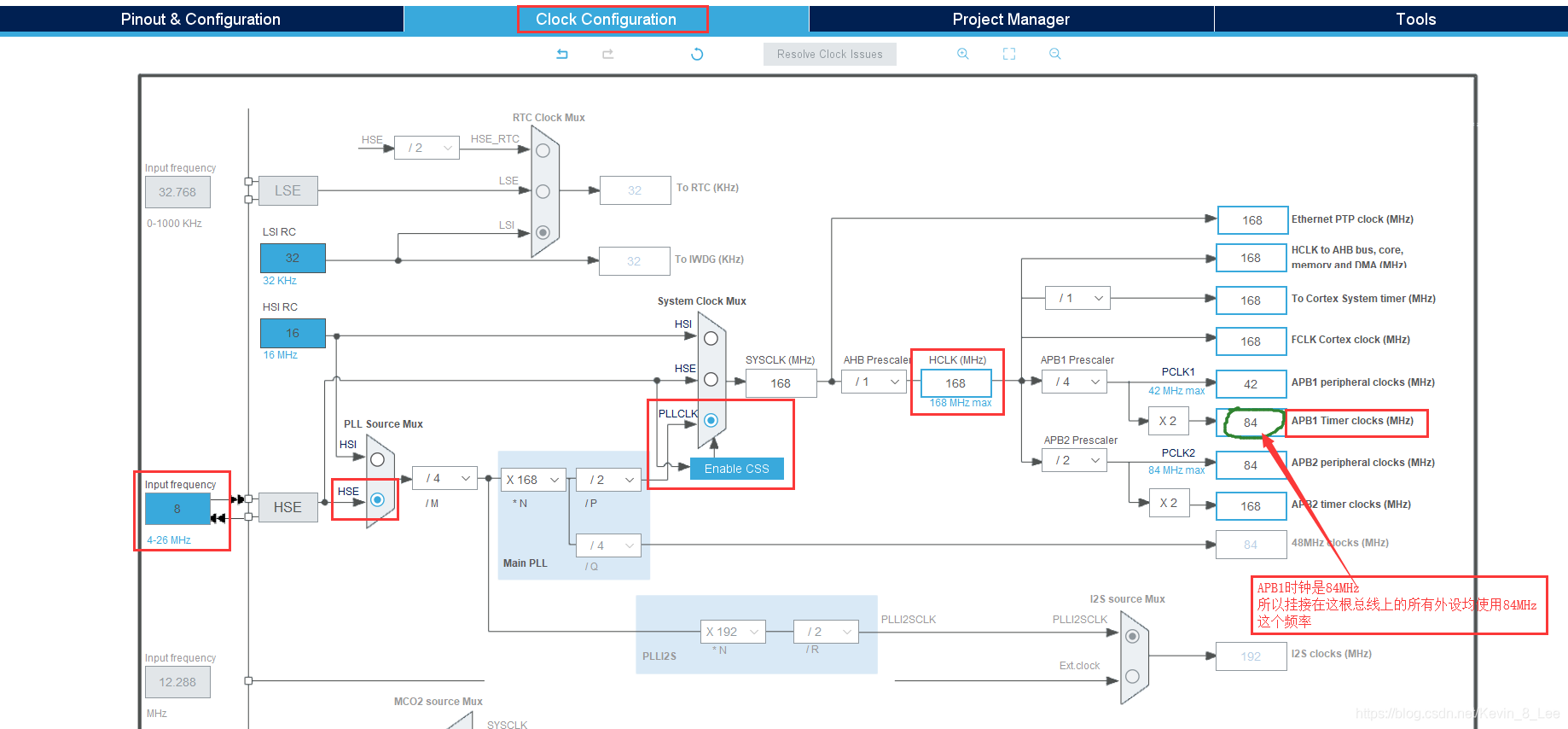
- 接着配置时钟树
![在这里插入图片描述]()
- tips: 配置时钟树之前别忘了先把RCC和SYS勾选好
-
(2) TIM3配参数置
- 1、 计算200ms的溢出时间所需要配置的ARR和PSC的值的大小
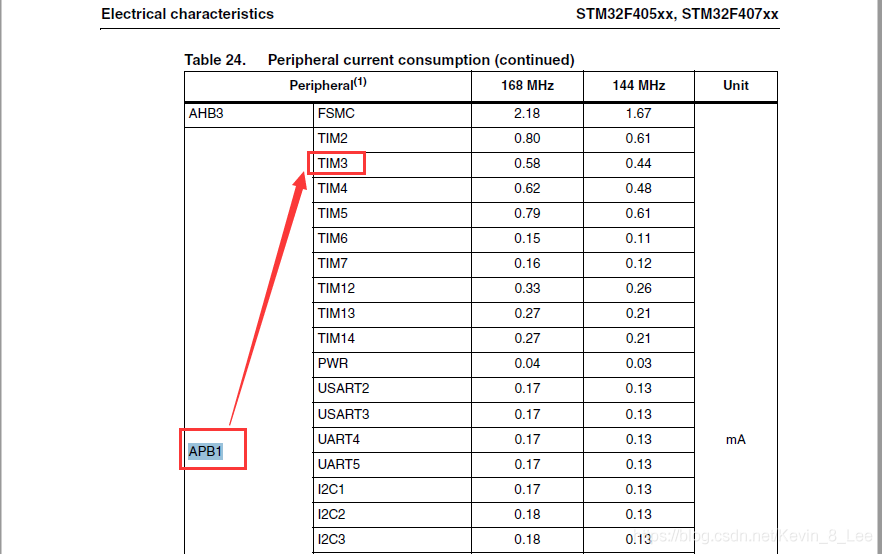
通过查阅datatsheet可以知道, TIM3的时钟挂接在APB1总线上, 所以就使用APB1总线时钟频率(84MHz)进行分频
![在这里插入图片描述]()
而我们用CubeMx配置的时钟树里面APB1是84MHz, 根据前面的公式:
Tout = ((ARR + 1)*(PSC + 1)) / Tclk
已知 Tclk 为 84MHz , 我们需要 Tout 为 200ms 即 200000us , 不妨先让PSC为 839, 带入上述公式可得 ARR = 19999. 这样算出来之后ARR和PSC都在0~65535的范围, 则可以使用这组参数*注 :*这个过程最好自己算一下; 还有就是ARR和PSC都是16位的寄存器, 数值一定要在0~65535这个范围
- 1、 计算200ms的溢出时间所需要配置的ARR和PSC的值的大小
下面是TIM3的具体配置
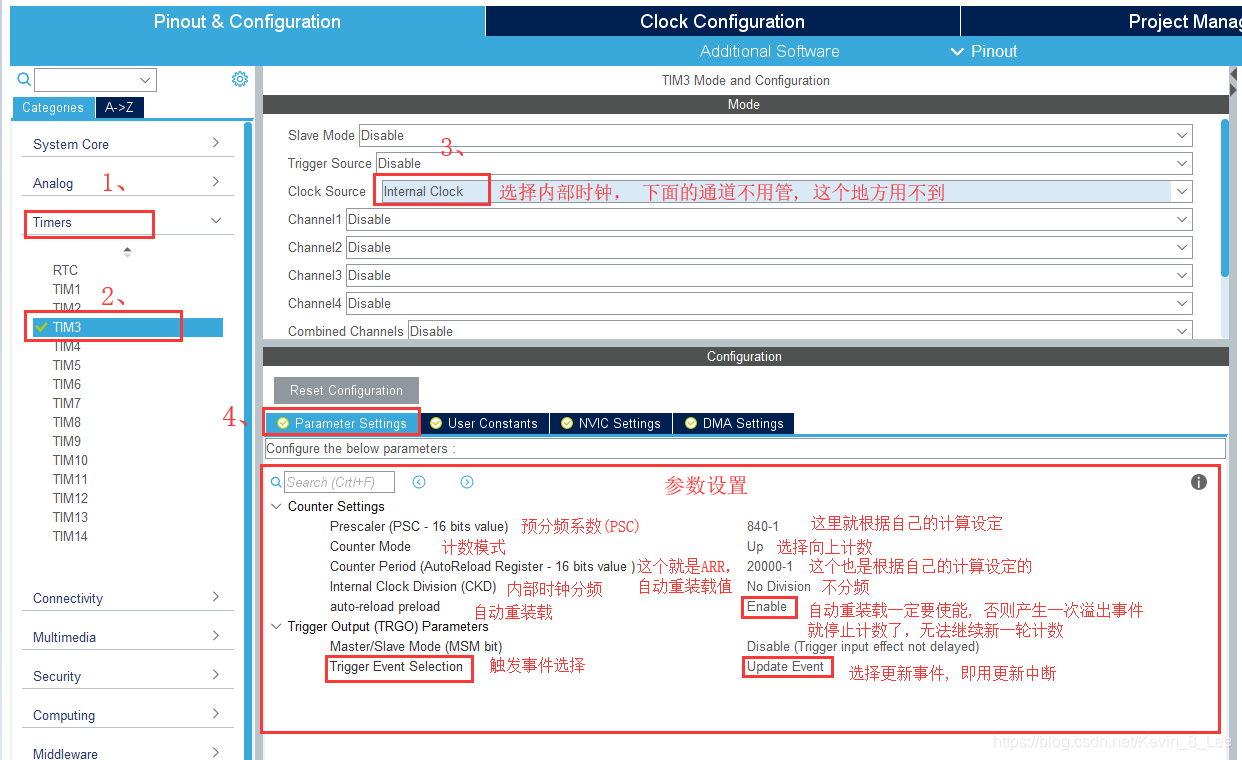
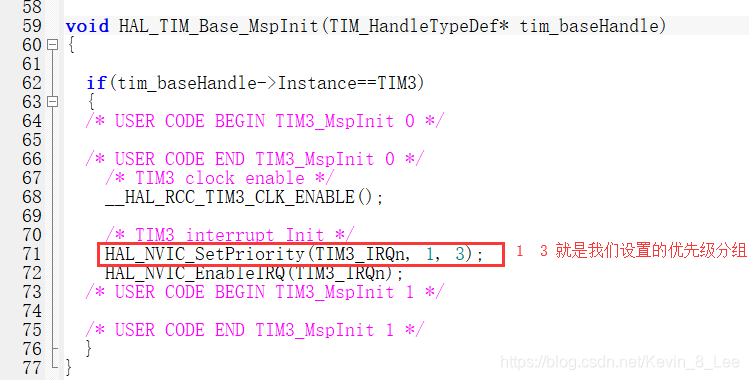
因为我们用到TIM3的中断, 所以不要忘记勾选中断使能; 可以在TIM3的NVIC Setting里面使勾选也可以在System Core里面勾选
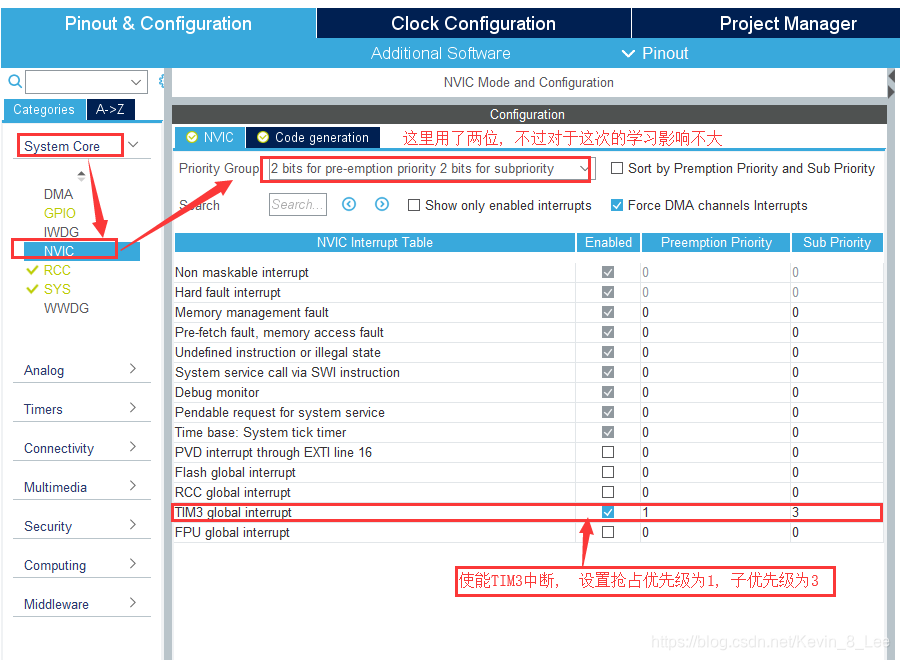
关于 Priority Group(中断优先级分组)
在这次的学习中随便设置, 前面的博客也说了, 这个分组主要用于多个定时器中断的时候, 为了各个定时器中断不互相干扰, 而给每个定时器中断排个号, 大家按顺序来;
按图中的配置解释一下, 2位用于抢占优先级和2位用于子优先级就是抢占优先级可以为0~3, 子优先级也可以为0~3;
在二进制中, 00就是0, 11就是3, 所以两位数可以表示0~3;
注 : 优先级大小 0 > 1 > 2 > 3
| 中断事件 | Preemption Priority | Sub Priority |
|---|---|---|
| E1 | 2 | 0 |
| E2 | 2 | 1 |
| E3 | 1 | 0 |
这个表格表示:
1、 当 E1 和 E2 中断发生时, 若 E3 发生中断, 则可以打断 E1 和 E2 的中断, 因为 E3 的抢占优先级是三者最高的;
2、 对于抢占优先级相同的E1和E2事件, 若E1 中断正在执行, E2 中断的到来不可以打断 E1 , 等 E1 执行完再去执行 E2 的中断; 反之亦然, 只要抢占优先级一样, 那么谁先发生就先执行谁, 不用比较Sub Priority
3、 E1 和 E2, 若同时到来, 这个时候才考虑Sub Priority, 先执行E1再执行E2
-
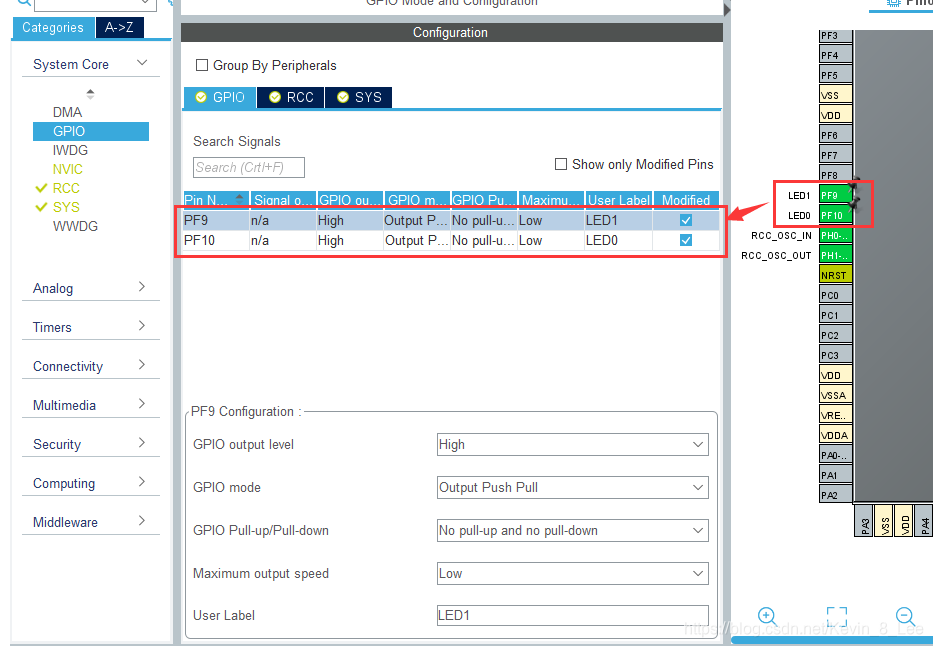
(3) 其他引脚的配置
我们要在中断里面翻转LED, 所以配置一下LED灯即可
![在这里插入图片描述]()
-
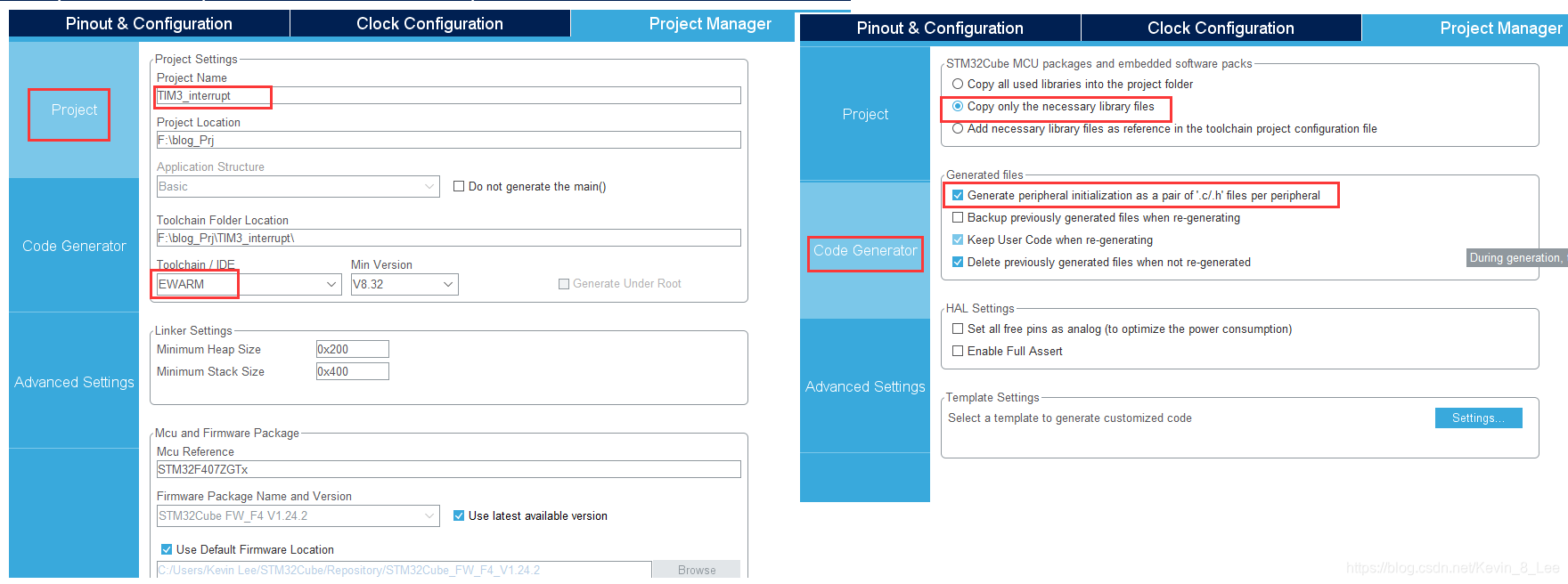
(4) 工程配置(与前面的类似)
![在这里插入图片描述]()
-
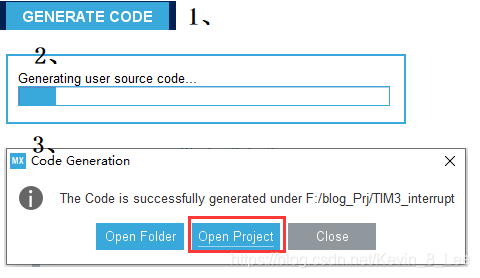
(5) Generate Code
![在这里插入图片描述]()
Step2 : IAR或Keil编程
-
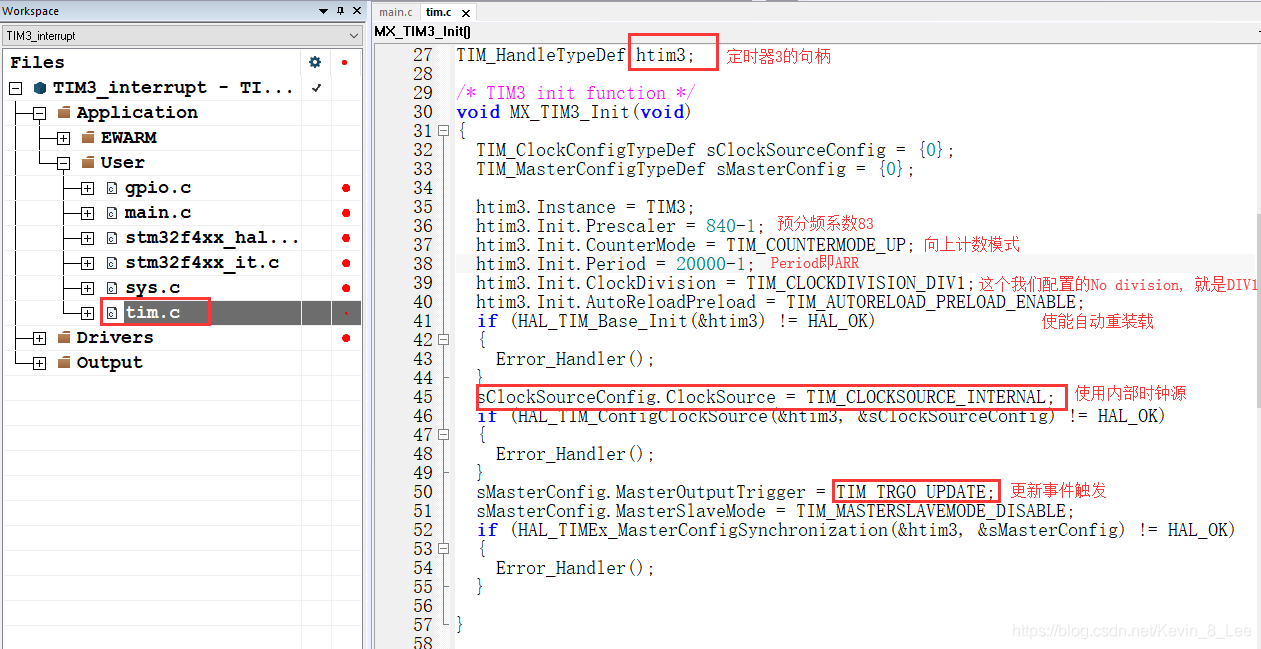
(1) 先看一下tim.c 里面的初始化写了些什么
![在这里插入图片描述]()
![在这里插入图片描述]()
-
(2) 写入用户代码
- 在主函数里面开启定时器中断
/* USER CODE BEGIN 2 */ HAL_TIM_Base_Start_IT(&htim3); /* USER CODE END 2 */注 : 要使用定时器中断一定要自己在主函数里面用代码打开, cubeMX配置的只是初始化参数, 是否打开取决于用户
- 写中断服务函数
在 stm32f4xx_it.h 里面找到 void TIM3_IRQHandler(void); 然后Go To Definition查看定义
/** * @brief This function handles TIM3 global interrupt. */ void TIM3_IRQHandler(void) { /* USER CODE BEGIN TIM3_IRQn 0 */ /* USER CODE END TIM3_IRQn 0 */ HAL_TIM_IRQHandler(&htim3); /* USER CODE BEGIN TIM3_IRQn 1 */ /* USER CODE END TIM3_IRQn 1 */ }再查看 HAL_TIM_IRQHandler() 的定义
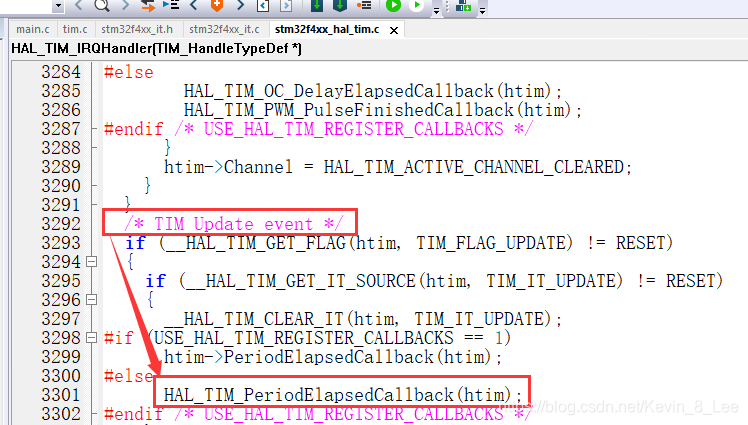
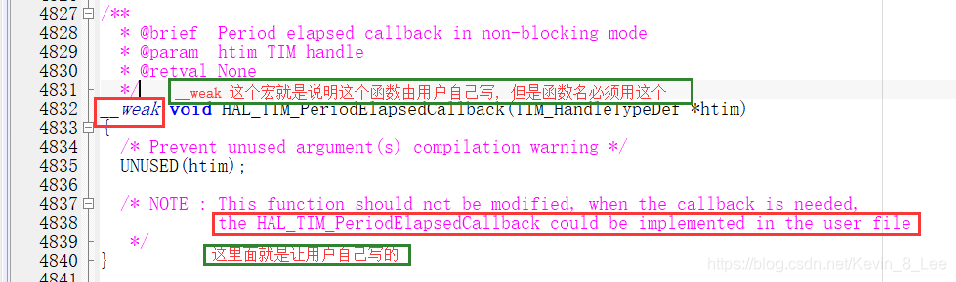
可以看到, 对于更新中断事件, 最终是执行的 HAL_TIM_PeriodElapsedCallback() 这个回调函数, 所以我们只需重构这个回调函数, 在里面写入自己的代码
- (3) 重构中断回调函数
我们把对回调函数的重构写在tim.c 里面, 便于查看也便于以后修改什么的
![在这里插入图片描述]()
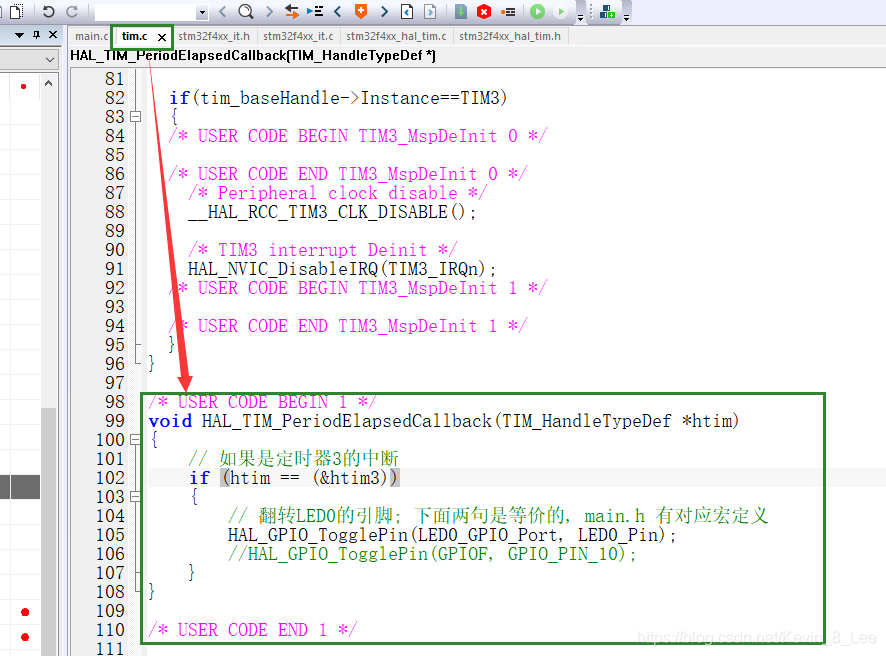
/* USER CODE BEGIN 1 */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
// 如果是定时器3的中断
if (htim == (&htim3))
{
// 翻转LED0的引脚; 下面两句是等价的, main.h 有对应宏定义
HAL_GPIO_TogglePin(LED0_GPIO_Port, LED0_Pin);
//HAL_GPIO_TogglePin(GPIOF, GPIO_PIN_10);
}
}
/* USER CODE END 1 */
- (4) 编译下载
实际效果如动图所示
![在这里插入图片描述]()
验证LED灯是每200ms翻转一次, 需要用示波器查看LED0对应引脚的波形数据
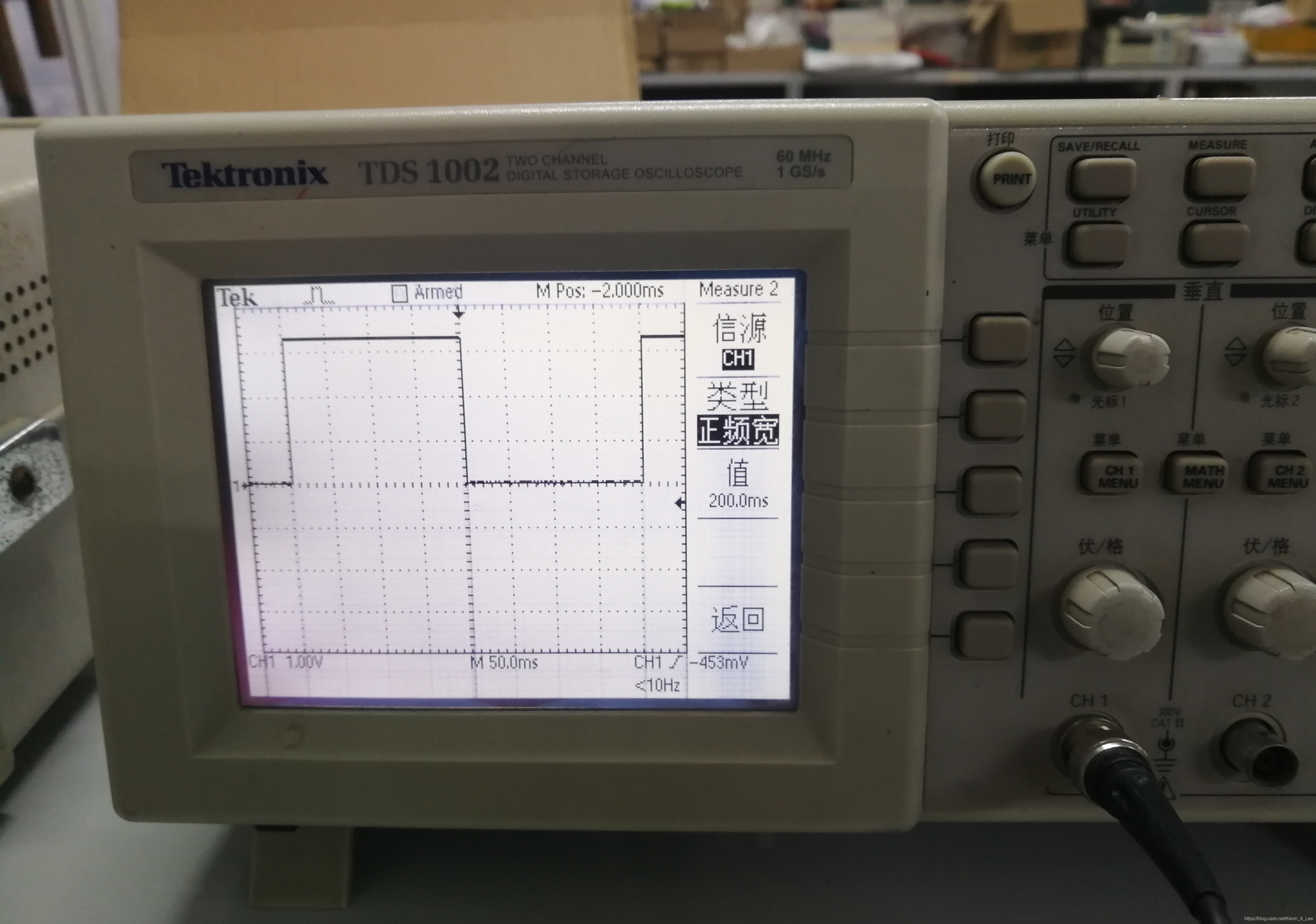
可以看到正频宽是200ms, 负频宽也是200ms, 所以跟我们预期的计算结果是一样的, 完美。
4.3 定时器产生PWM
操作简介 : 通过STM32定时器产生的PWM, 让LED灯做出呼吸灯的效果;
参考正点原子开发指南, 用CubeMX完成其标准库的程序配置
PWM(Pulse Width Modulation): 即脉冲宽度调制
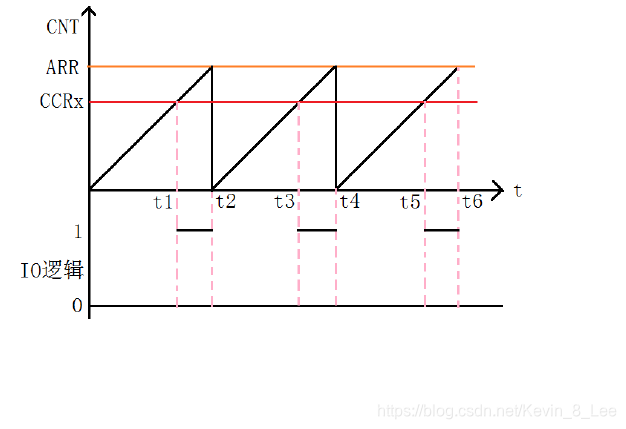
这个是以向上计数比较的, 当定时器计数器向上计数到CCRx之前, IO口一直输出0, 从到达CCRx开始输出1, 到ARR时溢出,重新计数。
IO口输出高低电平就用0和1表示。
显然, 如果改变CCRx值的大小, 就可以变化IO输出的PWM波形的占空比; 改变ARR(自动重装载值), 就可以改变PWM波形的频率。
在前面配置TIM3的时候我们没有用到那几个Channel, 现在产生PWM就需要用到了。 关掉IAR工程, 回到CubeMX开始配置
Step1 : Cube配置
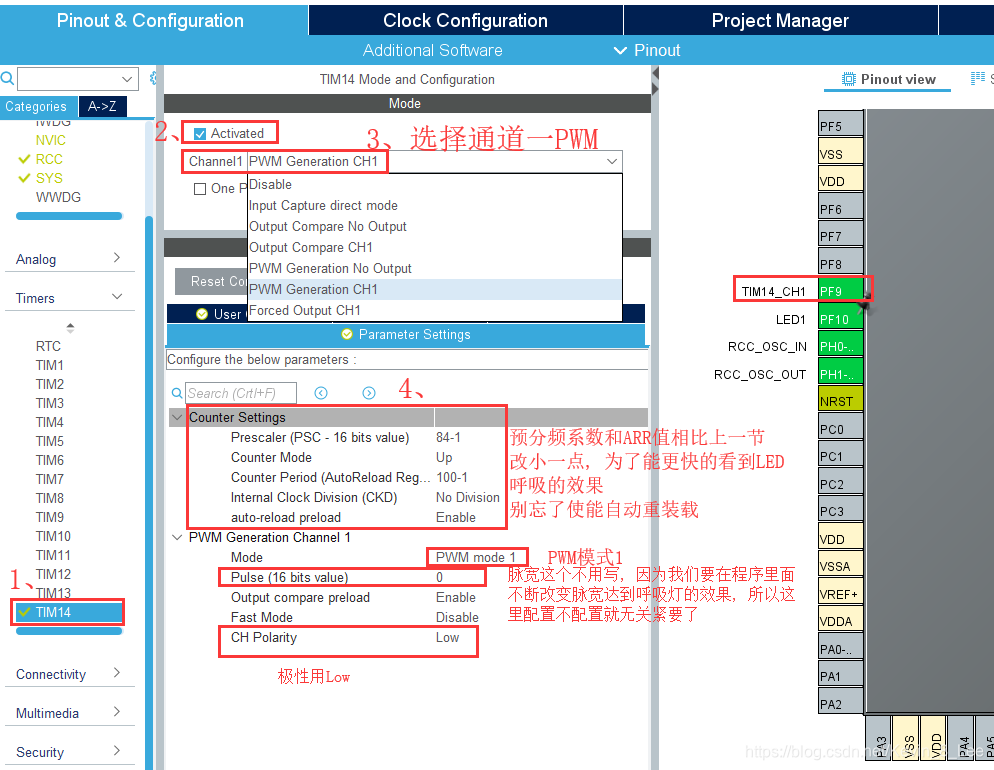
- (1) LED灯的引脚对应的是TIM14的通道1, 所以要配置TIM14来实现效果
注释 :
CH Polarity即通道输出极性。我们用TIM3向上计数模式, 按照前面PWM原理图解, CH Polarity的极性加上IO逻辑, 才是最终PWM的波形; 举个栗子, 如果CH Polarity为High(1), 那么当向上计数到CCRx之前本该是0(低电平), 但实际上还要加上Ch的输出极性, 所以那一段实际上是输出1(高电平)。 细细品一下脑子就通了
![在这里插入图片描述]()

选用PWM模式1, Pulse(脉宽)这个不用设置, 因为我们在程序里面要不断改变占空比去调节LED的亮度
- (2) 生成代码
先声明两个变量

/* USER CODE BEGIN 1 */
uint16_t CCRx_val = 0; // CCRx的值; 通过不断改变这个值, 并把这个值送入CCRx寄存器, 达到改变占空比的效果
uint8_t dir = 1; // 计数方向控制
/* USER CODE END 1 */
启动定时器的PWM

/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim14, TIM_CHANNEL_1);
/* USER CODE END 2 */
while(1)循环内部
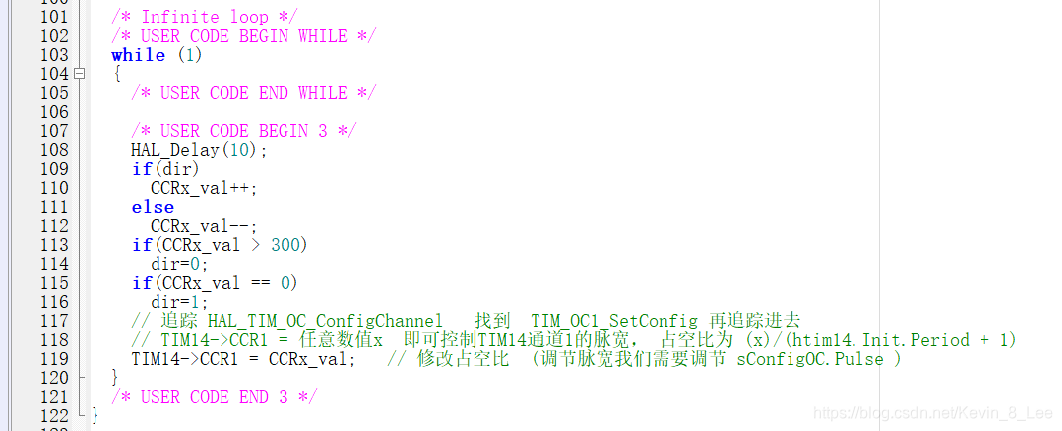
/* USER CODE BEGIN 3 */
HAL_Delay(10);
if(dir)
CCRx_val++;
else
CCRx_val--;
if(CCRx_val > 300)
dir=0;
if(CCRx_val == 0)
dir=1;
// 追踪 HAL_TIM_OC_ConfigChannel 找到 TIM_OC1_SetConfig 再追踪进去
// TIM14->CCR1 = 任意数值x 即可控制TIM14通道1的脉宽, 占空比为 (x)/(htim14.Init.Period + 1)
TIM14->CCR1 = CCRx_val; // 修改占空比 (调节脉宽我们需要调节 sConfigOC.Pulse )
所有用户代码就是这些, 这里用是寄存器操作去修改占空比, 不管使用什么库函数, 标准库或者HAL库亦或者LL库, 他们在程序里的地位都要低于寄存器。 所以当使用CubeMX配置使用HAL库不方便对某些IO操作的时候, 就可以用寄存器来操作
刚才在cube里面脉宽(Pulse)我们没有配置, 就是在这里通过寄存器操作的, 最终的本质都是寄存器操作; 感兴趣可以按照我的代码注释, 去 Go To Definition 一路追踪到 TIM_OC1_SetConfig() 这个函数, 这里面就是对相应的寄存器操作的。 在 stm32f4xx_hal_tim.c 这个文件里面
- (3) 编译下载
- 实际效果如下面动图所示, 看个三到四秒钟就可以看到变化了
可能看起来不是非常的明显, 自己操作一下可以好好观察现象
- 实际效果如下面动图所示, 看个三到四秒钟就可以看到变化了
人生岂止爱恨, 还有孤独和酒, 更有梦想与生活, 坚持住。 加油 !
Author : 李光辉
date : Sun Jan 5 22:18:02 CST 2020
blog ID: Kevin_8_Lee
blog site : https://blog.csdn.net/Kevin_8_Lee

 浙公网安备 33010602011771号
浙公网安备 33010602011771号