
本文大部分参考自> https://zhuanlan.zhihu.com/p/548904297 > 并进行了精简与修改,仅供学习使用。
一、卷积参数:
二维离散卷积:N=2;
输入大小:\(i_1=i_2=i\);
卷积核大小:\(k_1=k_2=k\);
两个方向的步长:\(s_1=s_2=s\);
两个方向的padding数目:\(p_1=p_2=p\);
二、卷积的操作方法:
卷积神经网络通过局部感受野捕捉输入数据(如图像)的边缘、纹理等低级特征,并逐层组合为高级特征(如物体形状)。
卷积的计算方法主要包括离散卷积的滑动窗口乘积求和(适用于图像处理)和连续卷积的积分运算,具体步骤涉及翻转、平移、乘积和求和/积分。
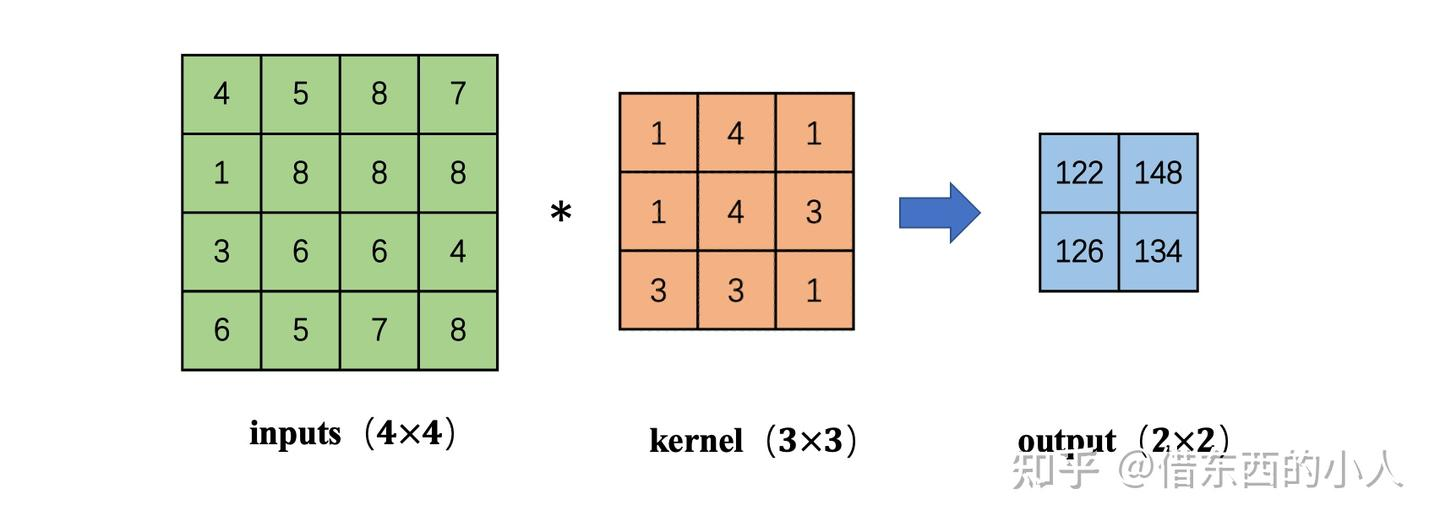
定义卷积核:选择一个大小为m \(\times\) n的矩阵(如3 \(\times\) 3的滤波器),称为卷积核或kernel。
滑动窗口操作:从输入矩阵左上角开始,将卷积核与对应位置的子矩阵逐元素相乘后求和,结果填入输出矩阵的对应位置。
公式: \(g(i,j)=\sum_{y=1}^n\sum_{x=1}^mf(x,y) \cdot h(x,y)\) ,
其中f为输入,h为卷积核。
边缘处理:若窗口超出输入矩阵边界,可采用补零、对称填充或忽略边缘像素。
例如对于图2.1,对于一个4 \(\times\) 4的输入图像,使用3 \(\times\) 3的卷积核进行卷积提取特征,则会得到一个2 \(\times\) 2的特征图输出。Padding表示额外填补图像边界的宽度,Stride表示滑动步长,实际对卷积核的作用请看2.4节的图4.5;
2.1 Padding=0,Stride=1
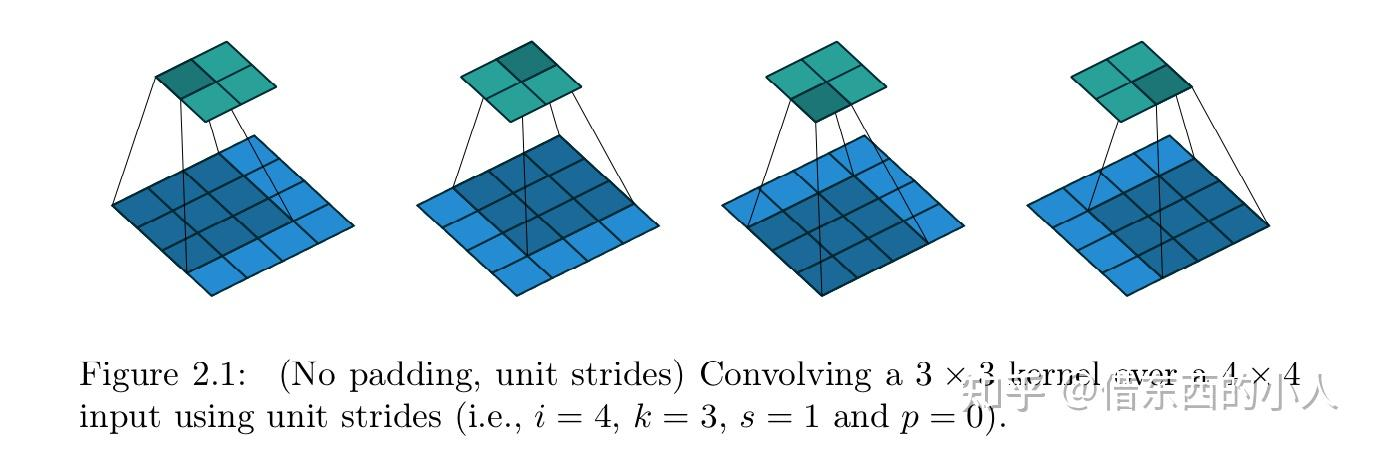
输出特征图大小:\(o=i-k+1\)
2.2 Padding=p,Stride=1
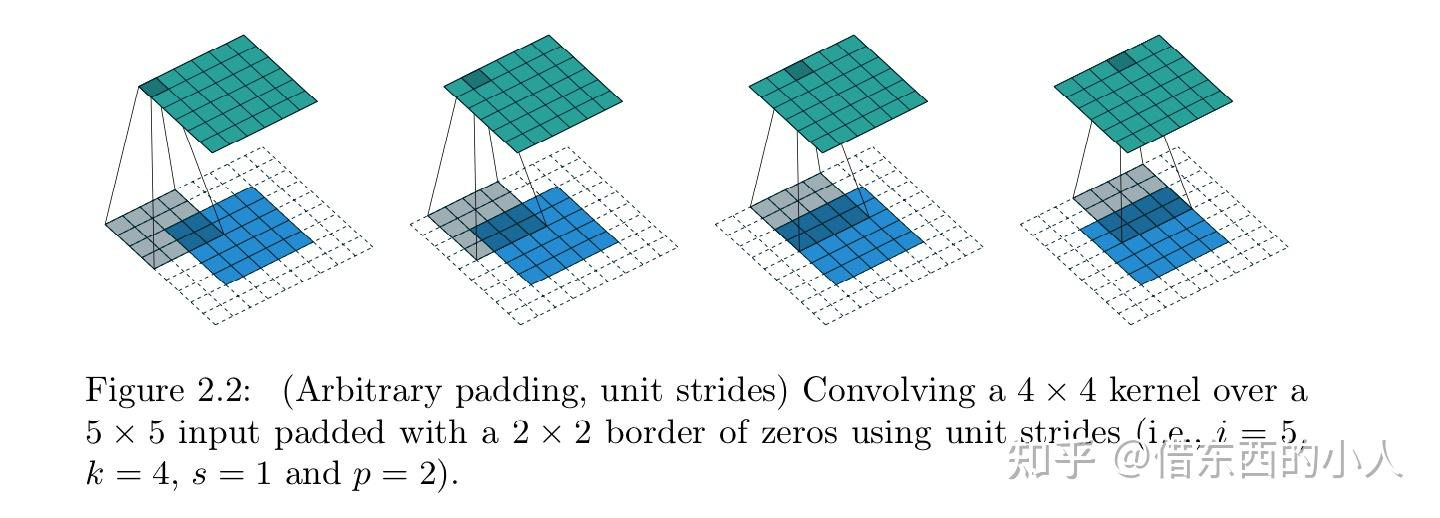
输出特征图大小:\(o=i-k+2p+1\)
特别的,half padding指 \(2p=k-1\) ,这样得到的输出与输入size一致。full padding指 \(p=k-1\) 。
2.3 Padding=0,Stride≠1
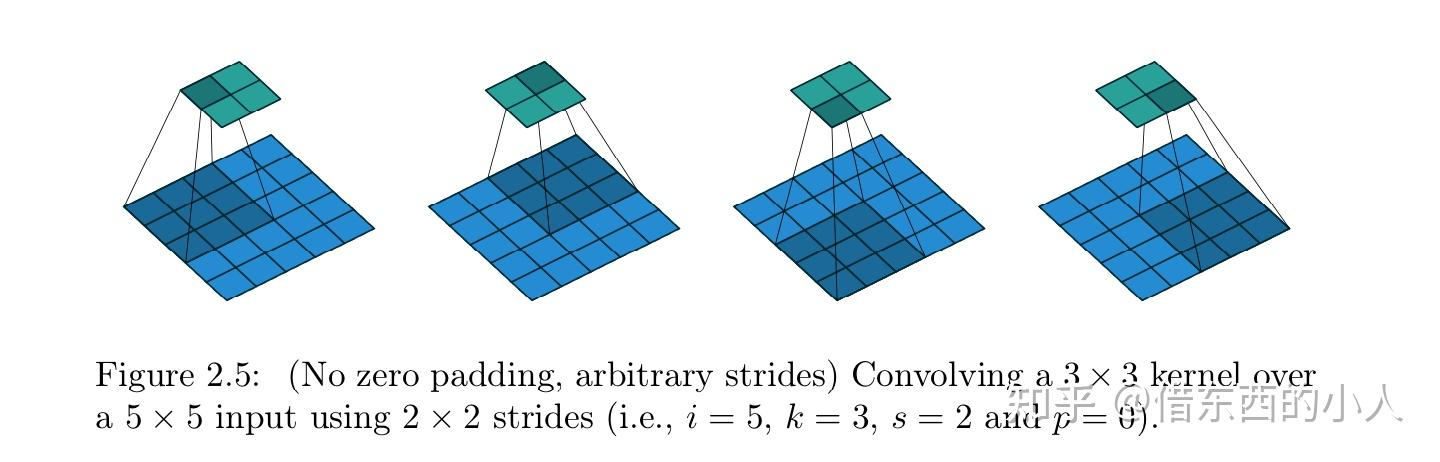
输出特征图大小:\(o=[\cfrac{i-k}{s}]+1\)
特别的,这也被称为池化运算。对输入特征图进行降维压缩的操作,其本质是采样。池化操作通过选择某种方式(如最大值或平均值)来压缩输入数据的空间维度,以加快神经网络的运算速度并减少计算量。最大池化通常用于突出前景和提取纹理信息,而平均池化则有助于保留背景信息。
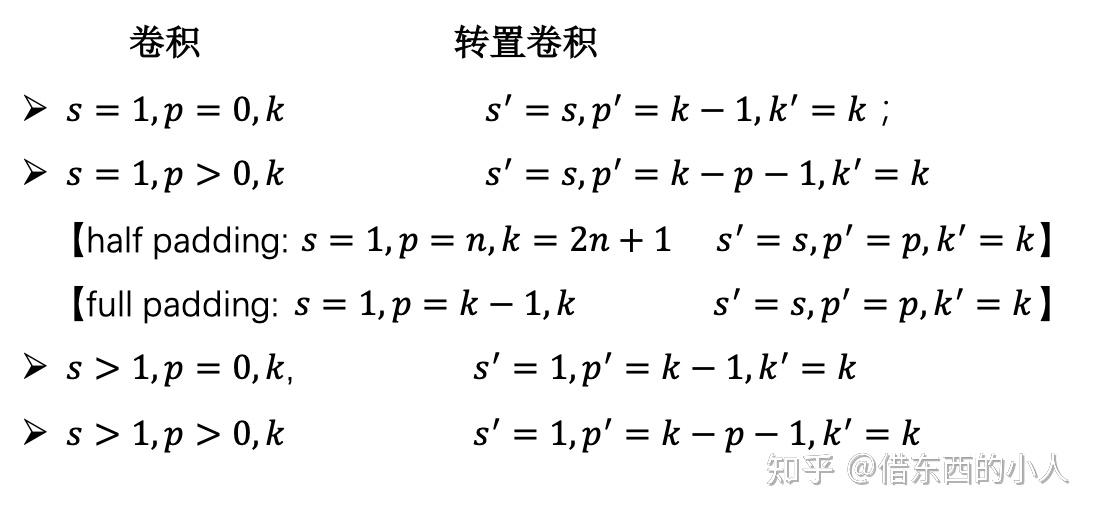
2.4 转置卷积
常见的转置卷积有两种:
(1)一种是认为转置卷积是上采样的一种,其他几种上采样方法分别是最近邻插值、双线性插值和反池化,它们一起构成了上采样的方法;
(2)另一种理解是认为转置卷积和上采样属于并列关系,就像pytorch的调用方法一样,上采样和转置卷积的API不同,如下所示:
torch.nn.Upsample(size=None, scale_factor=None, mode='nearest', align_corners=None)
torch.nn.ConvTranspose1d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros')
转置卷积的操作方法:
1.输入列展开
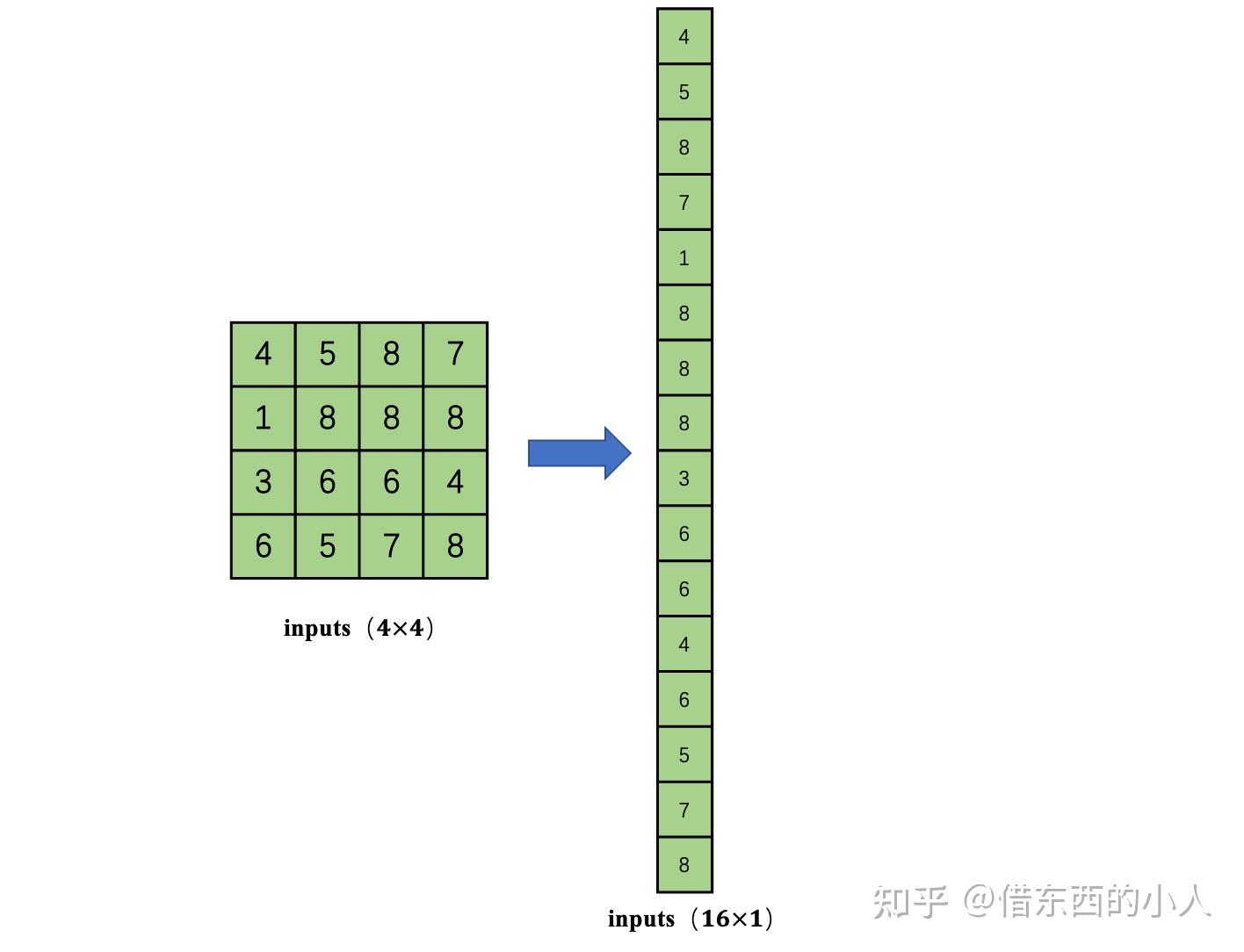
2.卷积核行展开
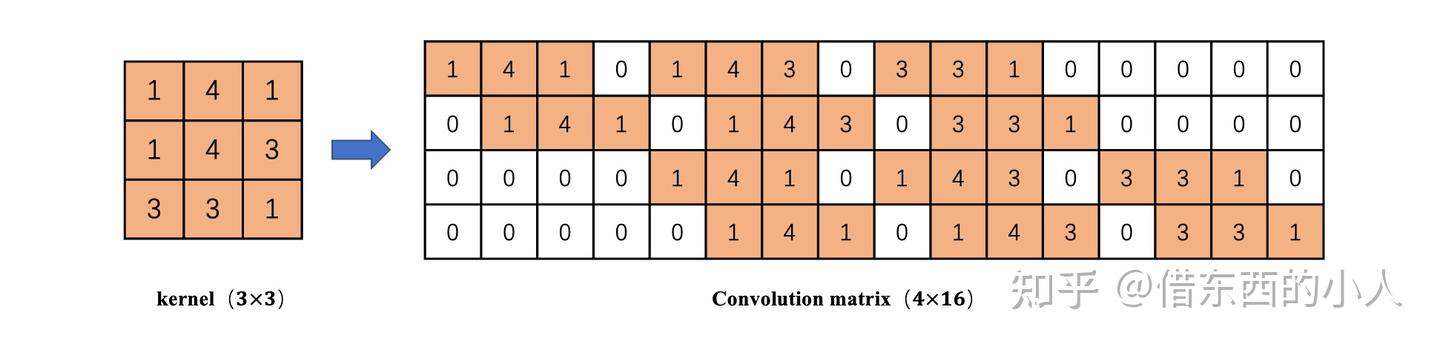
3.叉乘计算可以将16维压缩到4维
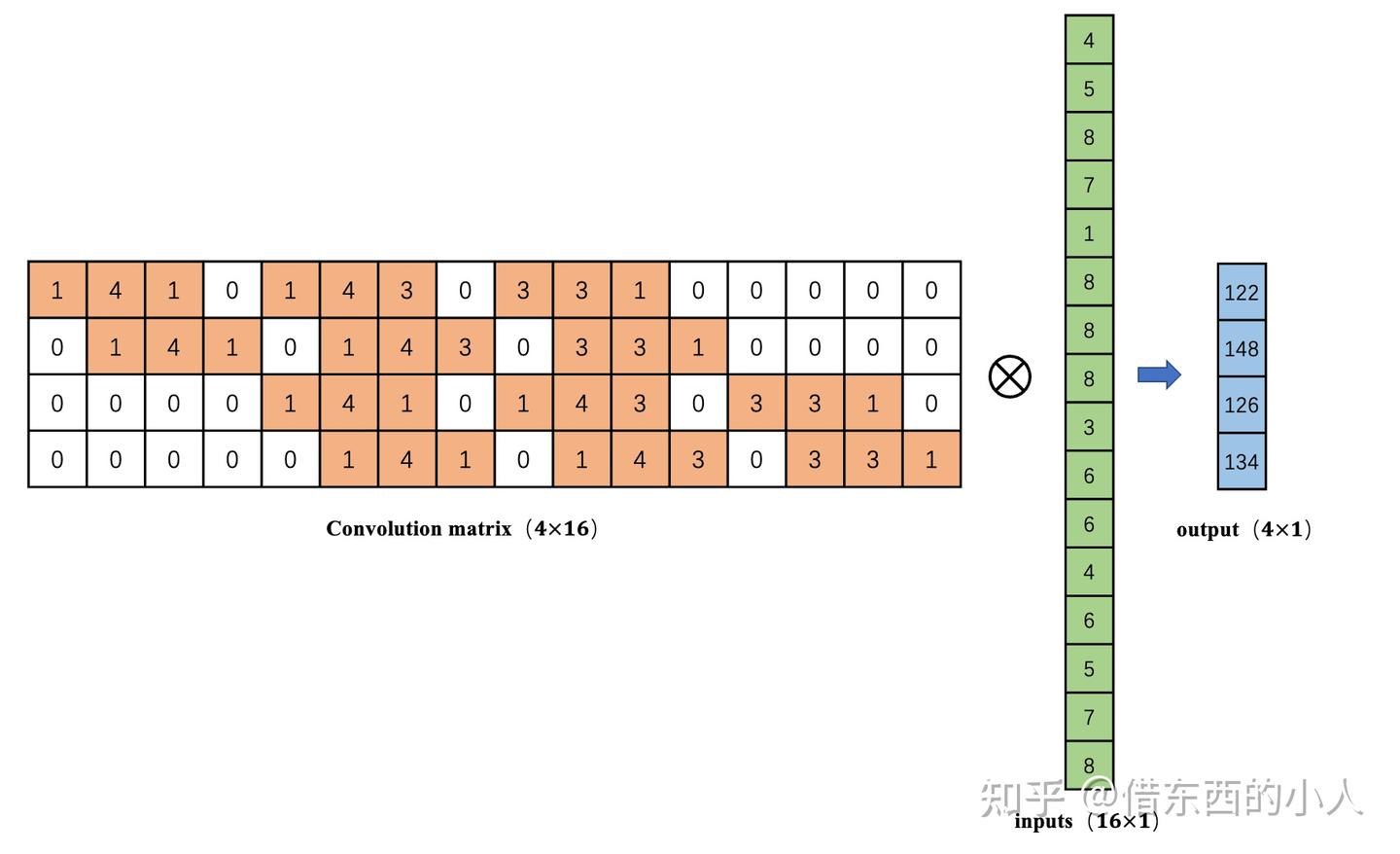
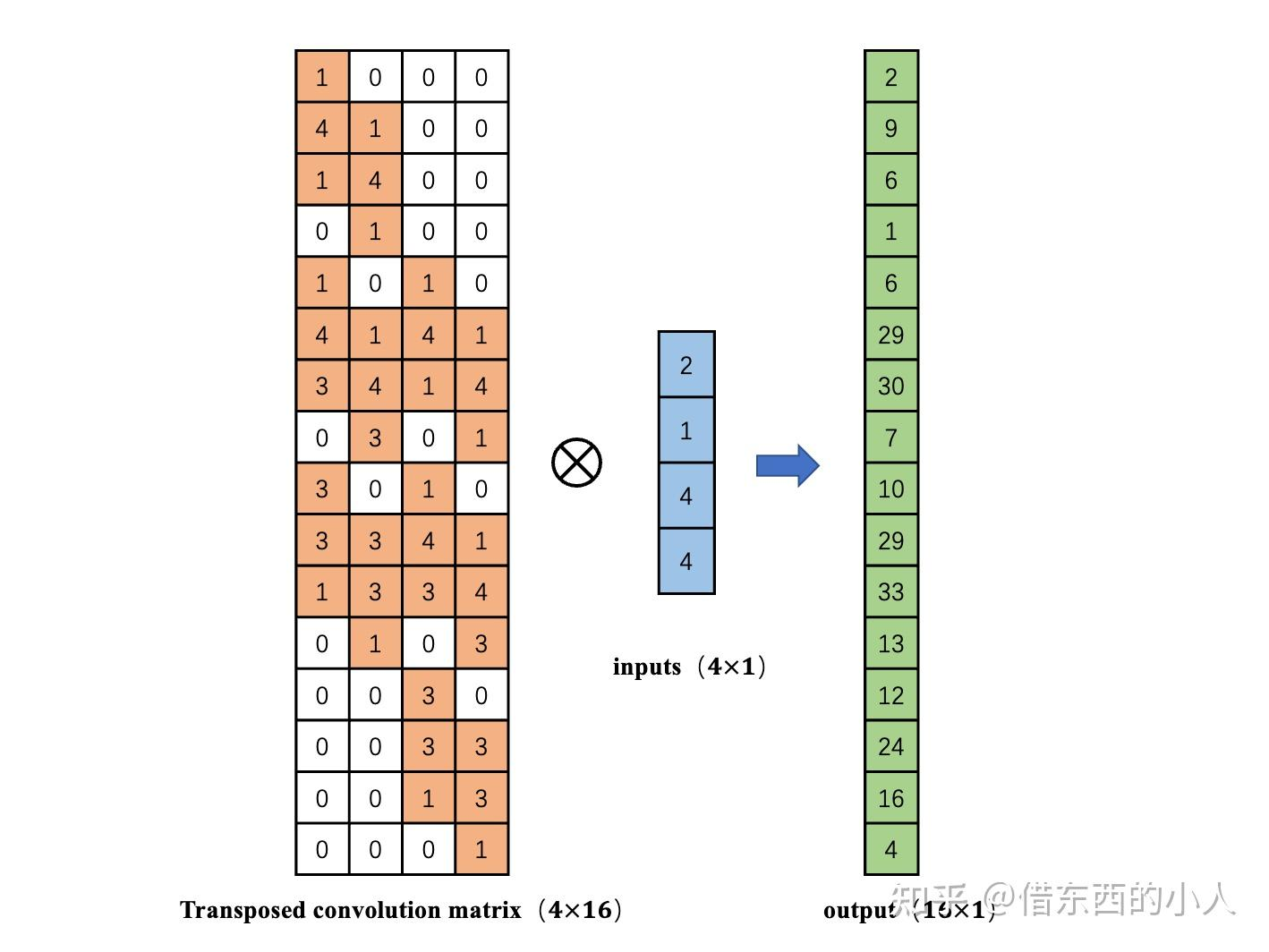
4.转置卷积的目的则在于,如何从4维倒推回16维的输入向量。
一个非常直观的做法是:对卷积矩阵求转置,再去计算矩阵相乘,这样就可以从输出特征图计算得到更高分辨率的输入特征图。
值得注意的是:
根据转置矩阵我们只能得到哪些位置的像素值应该是0,每个数值对应卷积核哪个位置的值,而这些数值要根据网络学习得到,而不是单纯的转置或逆;(补充:实际上)
这也是为什么有些人不赞同转置卷积被称为反卷积的原因;
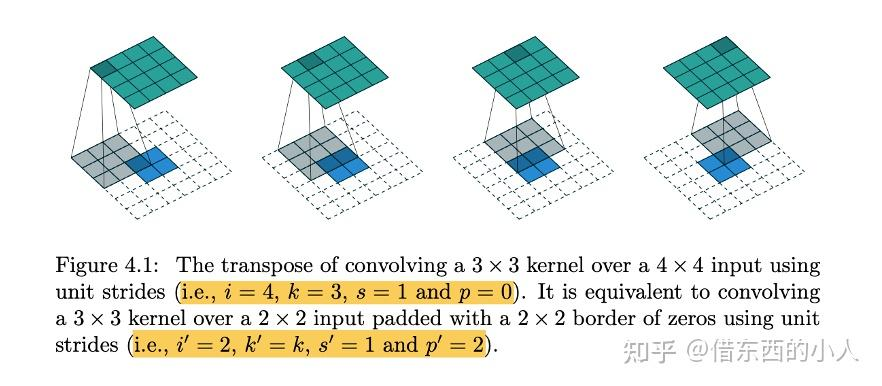
转置卷积的计算方法:
如图4.1,一个3 \(\times\) 3的卷积核作用在4 \(\times\) 4的输入图上得到2 $\time! 2的特征输出,就等价于3 $\time! 3的卷积核作用在padding=2的2 $\time! 2的输入图上得到4 \(\times\) 4 的输出特征。
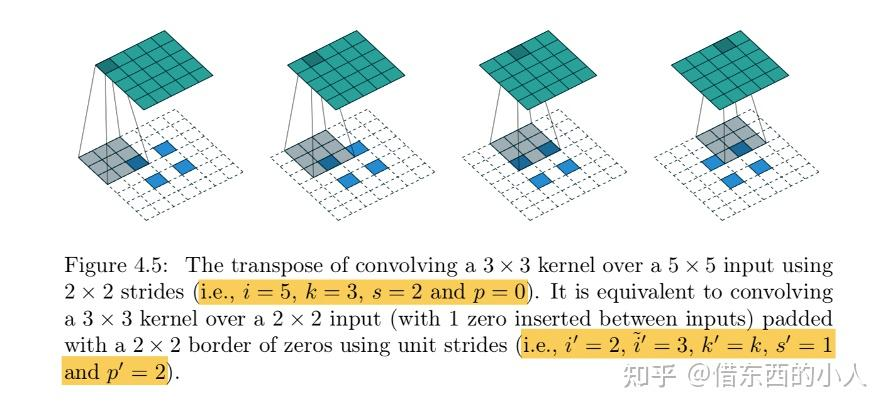
补充一个stride=2的案例
三、棋盘效应
我们在2.4小节介绍了一个比较特殊的卷积操作,转置卷积。该卷积核主要是用来实现上采样的算子操作,但该算子存在一定的缺陷,这就是本节要介绍的“棋盘效应”。
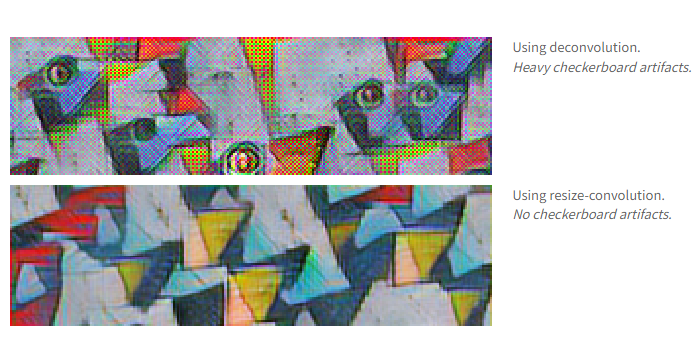
什么是棋盘效应?当在解码器中使用转置卷积作为上采样方法时,输出的feature map出现了如下图所示明显的网格状,这就有可能是转置卷积导致的“棋盘效应”:

这往往会导致这样的图片输出出现,不难看到有许多网格状的伪影:
Deconvolution and Checkerboard Artifacts > https://distill.pub/2016/deconv-checkerboard/ > 一文给出了解释,这是由不均匀重叠(uneven overlaps)导致的,当kernel size不能被stride整除时,我们容易看到如下图的不均匀重叠现象

拓展到二维上,这就演变成了棋盘效应。而且重要的是,在二维上这种增强重叠部分输出的情况由2倍会变为4倍。尽管卷积网络会通过调整权重来相消这种伪影,但实际情况中它们往往会使伪影叠加放大,从而在多种尺度上产生明显的视觉瑕疵。
另外有一种情况是,即使转置卷积已然被构建成了一种均匀覆盖的设计,
作者认为,转置卷积就是一种有问题的上采样方式:
·在最佳情况下,转置卷积是脆弱的:即使卷积核尺寸经过精心选择,它也非常容易表示出会产生伪影的函数。
·在最坏情况下,产生伪影就是转置卷积的默认行为。
在这里我们给出常见的两个解决办法:
1.确保反卷积的卷积核大小能被步长整除,这能大幅度缓解棋盘效应的出现(问题在于无法消除!);
2.分离上采样与特征学习,先使用插值方法(如最近邻、双线性)将特征图放大,再用标准卷积层提取新空间尺度下的特征,训练更稳定(问题在于参数量增大,训练速度降低!);
x = F.interpolate(x, scale_factor=2, mode='bilinear', align_corners=False)
x = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1)(x)
特别地,pixelshuffle是方法1的一种等价的方法,即sub-pixel convolution> Real-Time Single Image and Video Super-Resolution Using an Efficient Sub-Pixel Convolutional Neural Network >。简单来说,原文的主要思想在于将所有卷积都在低分辨率特征图上进行,最后通过一个特殊的层——Sub-Pixel Convolution——将通道信息重排到空间维度,实现上采样。该卷积方法的原理是先通过普通卷积扩展通道数(如放大 r² 倍),然后将通道维度上的值“搬”到空间维度上,实现分辨率放大。该方法在后续的超分方法上都有广泛使用。
点击查看代码
LR Input (H, W)
→ Conv layers (在低分辨率上提取特征)
→ 输出: (r² × C, H, W)
→ Sub-Pixel Convolution (PixelShuffle)
→ 输出: (C, r×H, r×W)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号