


day41:ADC电压采集【使用DMA搬运数据+独立模式+多通道】
day40是使用中断获取数据(即每次转换完成之后触发中断获取数据,这对CPU压力很大),
day40是单通道的,智能获取一个数据,这节是多通道【ADC1的通道10-15,共六个通道】,可以同时获取6个数据
而且使用的是DMA搬运数据,减少CPU的工作压力,提高数据搬运效率。
======================================================================
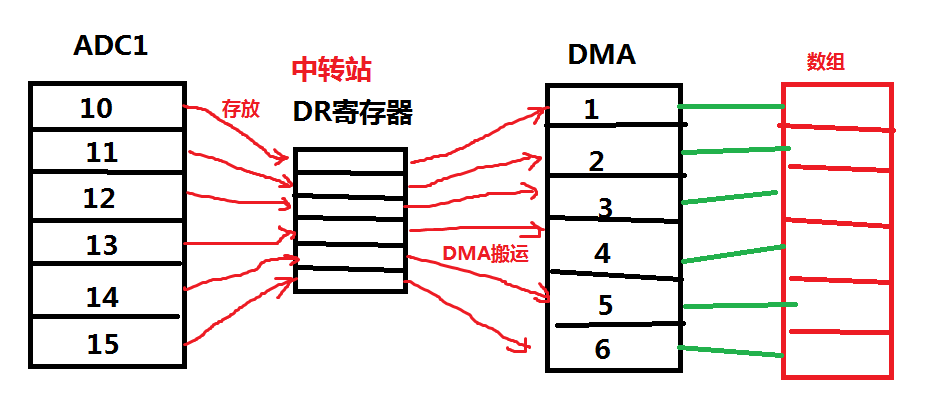
数据搬运的原理:
=======================================
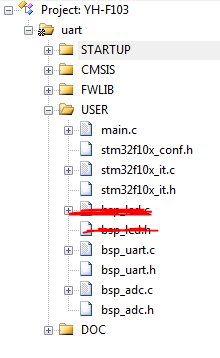
【工程结构】
【代码清单】
bsp_adc.h
#ifndef __BSP_ADC_H #define __BSP_ADC_H #include "stm32f10x.h" // 注意:用作ADC采集的IO必须没有复用,否则采集电压会有影响 /********************ADC1输入通道(引脚)配置**************************/ #define ADC_APBxClock_FUN RCC_APB2PeriphClockCmd #define ADC_CLK RCC_APB2Periph_ADC1 #define ADC_GPIO_APBxClock_FUN RCC_APB2PeriphClockCmd #define ADC_GPIO_CLK RCC_APB2Periph_GPIOC #define ADC_PORT GPIOC // 注意 // 1-PC0 在IOT里面接的是蜂鸣器,默认被拉低 // 2-PC0 在MINI里面接的是SPI FLASH的 片选,默认被拉高 // 所以 PC0 做 ADC 转换通道的时候,结果可能会有误差 // 转换通道个数 #define NOFCHANEL 6 #define ADC_PIN1 GPIO_Pin_0 #define ADC_CHANNEL1 ADC_Channel_10 #define ADC_PIN2 GPIO_Pin_1 #define ADC_CHANNEL2 ADC_Channel_11 #define ADC_PIN3 GPIO_Pin_2 #define ADC_CHANNEL3 ADC_Channel_12 #define ADC_PIN4 GPIO_Pin_3 #define ADC_CHANNEL4 ADC_Channel_13 #define ADC_PIN5 GPIO_Pin_4 #define ADC_CHANNEL5 ADC_Channel_14 #define ADC_PIN6 GPIO_Pin_5 #define ADC_CHANNEL6 ADC_Channel_15 // ADC1 对应 DMA1通道1,ADC3对应DMA2通道5,ADC2没有DMA功能 #define ADC_x ADC1 #define ADC_DMA_CHANNEL DMA1_Channel1 #define ADC_DMA_CLK RCC_AHBPeriph_DMA1 void ADCx_Init(void); #endif /* __BSP_ADC_H */
bsp_adc.c
#include "./adc/bsp_adc.h"
__IO uint16_t ADC_ConvertedValue[NOFCHANEL]={0,0,0,0,0,0};
static void ADCx_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 打开 ADC IO端口时钟
ADC_GPIO_APBxClock_FUN ( ADC_GPIO_CLK, ENABLE );
// 配置 ADC IO 引脚模式
GPIO_InitStructure.GPIO_Pin = ADC_PIN1|
ADC_PIN2|
ADC_PIN3|
ADC_PIN4|
ADC_PIN5|
ADC_PIN6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
// 初始化 ADC IO
GPIO_Init(ADC_PORT, &GPIO_InitStructure);
}
static void ADCx_Mode_Config(void)
{
DMA_InitTypeDef DMA_InitStructure;
ADC_InitTypeDef ADC_InitStructure;
// 打开DMA时钟
RCC_AHBPeriphClockCmd(ADC_DMA_CLK, ENABLE);
// 打开ADC时钟
ADC_APBxClock_FUN ( ADC_CLK, ENABLE );
// 复位DMA控制器
DMA_DeInit(ADC_DMA_CHANNEL);
// 配置 DMA 初始化结构体
// 外设基址为:ADC 数据寄存器地址
DMA_InitStructure.DMA_PeripheralBaseAddr = ( u32 ) ( & ( ADC_x->DR ) );
// 存储器地址
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)ADC_ConvertedValue;
// 数据源来自外设
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
// 缓冲区大小,应该等于数据目的地的大小
DMA_InitStructure.DMA_BufferSize = NOFCHANEL;
// 外设寄存器只有一个,地址不用递增
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
// 存储器地址递增
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
// 外设数据大小为半字,即两个字节
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
// 内存数据大小也为半字,跟外设数据大小相同
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
// 循环传输模式
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
// DMA 传输通道优先级为高,当使用一个DMA通道时,优先级设置不影响
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
// 禁止存储器到存储器模式,因为是从外设到存储器
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
// 初始化DMA
DMA_Init(ADC_DMA_CHANNEL, &DMA_InitStructure);
// 使能 DMA 通道
DMA_Cmd(ADC_DMA_CHANNEL , ENABLE);
// ADC 模式配置
// 只使用一个ADC,属于单模式
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
// 扫描模式
ADC_InitStructure.ADC_ScanConvMode = ENABLE ;
// 连续转换模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE;
// 不用外部触发转换,软件开启即可
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
// 转换结果右对齐
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
// 转换通道个数
ADC_InitStructure.ADC_NbrOfChannel = NOFCHANEL;
// 初始化ADC
ADC_Init(ADC_x, &ADC_InitStructure);
// 配置ADC时钟N狿CLK2的8分频,即9MHz
RCC_ADCCLKConfig(RCC_PCLK2_Div8);
// 配置ADC 通道的转换顺序和采样时间
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL1, 1, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL2, 2, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL3, 3, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL4, 4, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL5, 5, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC_x, ADC_CHANNEL6, 6, ADC_SampleTime_55Cycles5);
// 使能ADC DMA 请求
ADC_DMACmd(ADC_x, ENABLE);
// 开启ADC ,并开始转换
ADC_Cmd(ADC_x, ENABLE);
// 初始化ADC 校准寄存器
ADC_ResetCalibration(ADC_x);
// 等待校准寄存器初始化完成
while(ADC_GetResetCalibrationStatus(ADC_x));
// ADC开始校准
ADC_StartCalibration(ADC_x);
// 等待校准完成
while(ADC_GetCalibrationStatus(ADC_x));
// 由于没有采用外部触发,所以使用软件触发ADC转换
ADC_SoftwareStartConvCmd(ADC_x, ENABLE);
}
void ADCx_Init(void)
{
ADCx_GPIO_Config();
ADCx_Mode_Config();
}
bsp_uart.h
#ifndef __BSP_UART_H
#define __BSP_UART_H
#include "stm32f10x.h"
#include "stdio.h"
// 串口1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200
// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10
#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler
void DEBUG_UART_Config(void);
void Usart_SendString( USART_TypeDef * pUSARTx, char *str);
#endif /* __BSP_UART_H */
bsp_uart.c
#include "./uart/bsp_uart.h"
//static void NVIC_Configuration(void)
//{
// NVIC_InitTypeDef NVIC_InitStructure;
//
// /* 嵌套向量中断控制器组选择 */
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//
// /* 配置USART为中断源 */
// NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
// /* 抢断优先级*/
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// /* 子优先级 */
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
// /* 使能中断 */
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// /* 初始化配置NVIC */
// NVIC_Init(&NVIC_InitStructure);
//}
void DEBUG_UART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 第一步:初始化GPIO */
// 打开串口GPIO的时钟
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
/* 第二步:配置串口的初始化结构体 */
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
/*--------------------------------------------------------*/
// // 串口中断优先级配置
// NVIC_Configuration();
//
// // 使能串口接收中断
// USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
/*--------------------------------------------------------*/
/* 第三步:使能串口 */
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/***************** 发送一个字节 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{
/* 发送一个字节数据到USART */
USART_SendData(pUSARTx,ch);
/* 等待发送数据寄存器为空 */
while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}
/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{
unsigned int k=0;
do
{
Usart_SendByte( pUSARTx, *(str + k) );
k++;
} while(*(str + k)!='\0');
/* 等待发送完成 */
while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET)
{}
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
main.c
#include "stm32f10x.h"
#include "./led/bsp_led.h"
#include "./uart/bsp_uart.h"
#include "./adc/bsp_adc.h"
// ADC1转换的电压值通过MDA方式传到SRAM
extern __IO uint16_t ADC_ConvertedValue[NOFCHANEL];
// 用于保存转换计算后的电压值
float ADC_ConvertedValueLocal[NOFCHANEL];
// 软件延时
void Delay(__IO uint32_t nCount)
{
for(; nCount != 0; nCount--);
}
int main(void)
{
DEBUG_UART_Config();
ADCx_Init();
printf("\r\n ----这是一个ADC多通道DMA读取实验----\r\n");
while (1)
{
ADC_ConvertedValueLocal[0] =(float) ADC_ConvertedValue[0]/4096*3.3;
ADC_ConvertedValueLocal[1] =(float) ADC_ConvertedValue[1]/4096*3.3;
ADC_ConvertedValueLocal[2] =(float) ADC_ConvertedValue[2]/4096*3.3;
ADC_ConvertedValueLocal[3] =(float) ADC_ConvertedValue[3]/4096*3.3;
ADC_ConvertedValueLocal[4] =(float) ADC_ConvertedValue[4]/4096*3.3;
ADC_ConvertedValueLocal[5] =(float) ADC_ConvertedValue[5]/4096*3.3;
printf("\r\n CH0 value = %f V \r\n",ADC_ConvertedValueLocal[0]);
printf("\r\n CH1 value = %f V \r\n",ADC_ConvertedValueLocal[1]);
printf("\r\n CH2 value = %f V \r\n",ADC_ConvertedValueLocal[2]);
printf("\r\n CH3 value = %f V \r\n",ADC_ConvertedValueLocal[3]);
printf("\r\n CH4 value = %f V \r\n",ADC_ConvertedValueLocal[4]);
printf("\r\n CH5 value = %f V \r\n",ADC_ConvertedValueLocal[5]);
printf("\r\n\r\n");
Delay(0xffffee);
}
}
===================================================
编译程序,烧录到板子中。
PC1-PC5是电压测头,可以同时测量六个电压数据
用杜邦线分别连接测头和GPIO引脚,就可以测量这六个引脚的电压
如果连接VAR电位器引脚,旋转旋钮就可以测量不同的电压值。
====================================================
PC0接GND时:CH0即PC0测头测量的电压为0,其他通道的值都是默认的值
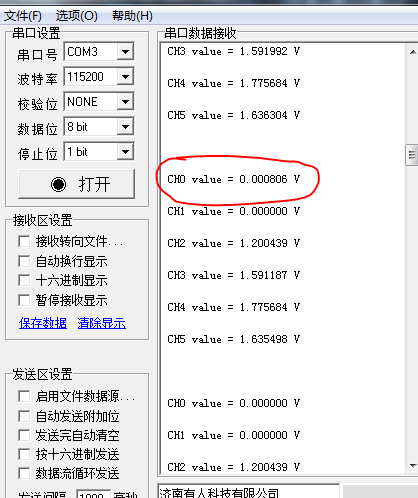
PC2-PC5分别接GND也都为0
也可以测试VAR,这里不上图了
================================
以上说明:
使用ADC1的多通道,可以模拟出多个数据测量头(这里是PC0-PC5),
用这些测量头去测量六个地方的数据,就可以获取六个数据(多个数据)
================================
上一节智能测量1个数据
这一节能同时测量多个数据


 浙公网安备 33010602011771号
浙公网安备 33010602011771号