


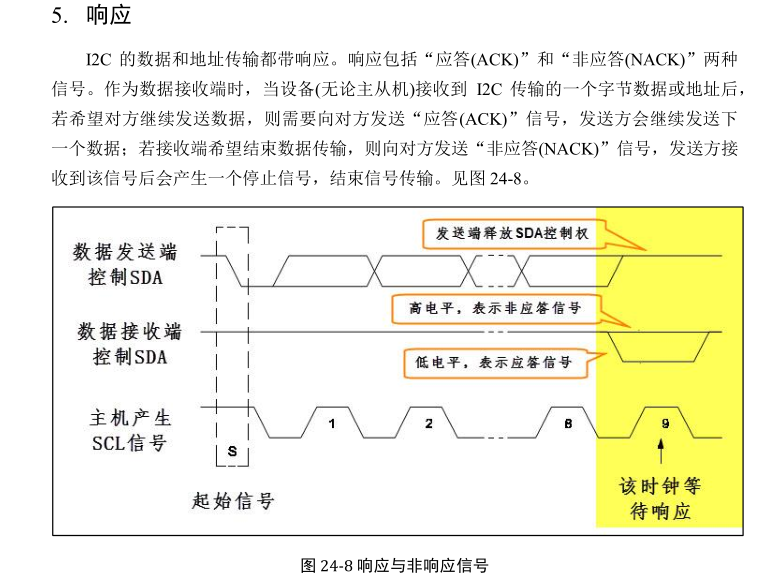
day18:I2C通信工程函数文件(包括:端口与引脚的定义、起始信号、终止信号、应答与非应答、读写输入函数等等I2C通信的支持函数)
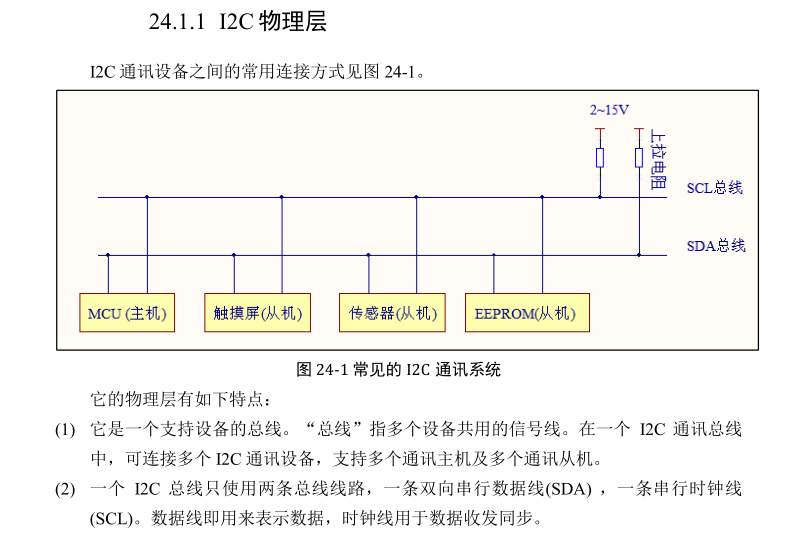
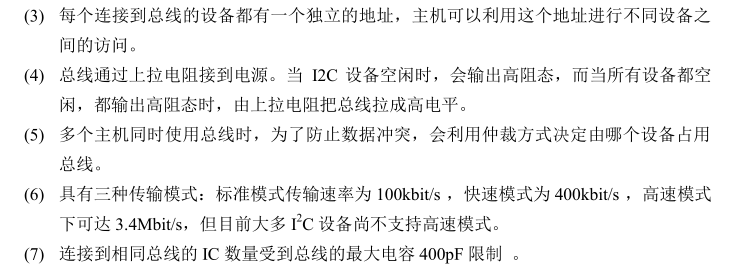
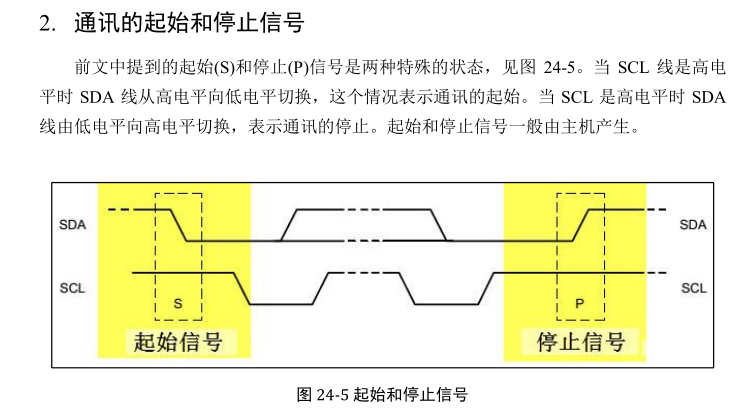
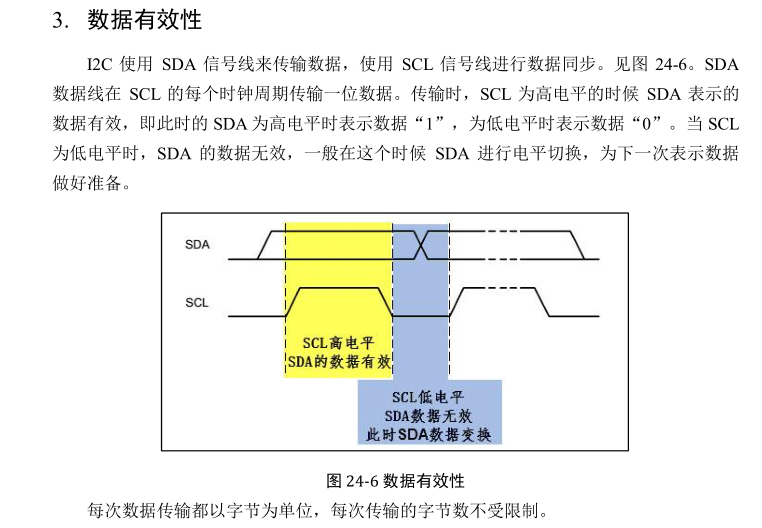
相关知识:


工程结构:
(1)bsp_i2c_gpio.h
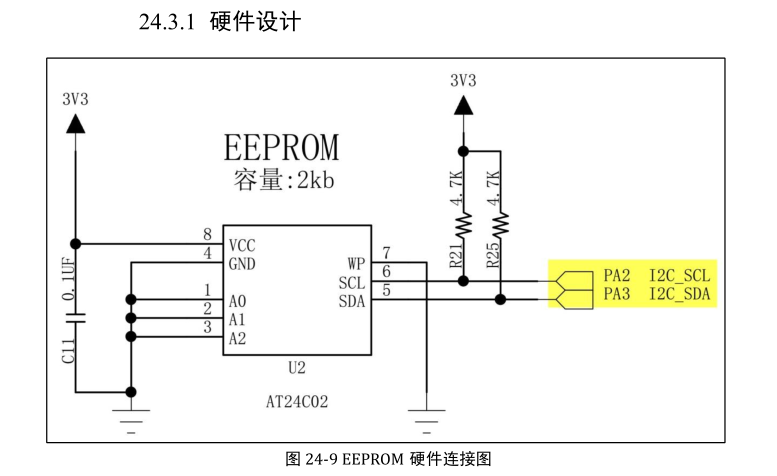
#ifndef __BSP_I2C_H__ #define __BSP_I2C_H__ #include "stm32f10x.h" /* I2C的GPIO端口定义:SCL接PA2,SDA接PA3 */ #define I2C_SCL_GPIO_PORT GPIOA // A端口 #define I2C_SCL_GPIO_PIN GPIO_Pin_2 // 引脚2 #define I2C_SCL_GPIO_CLK RCC_APB2Periph_GPIOA // 时钟:PA2挂在到APB2总线上 #define I2C_SDA_GPIO_PORT GPIOA // A端口 #define I2C_SDA_GPIO_PIN GPIO_Pin_3 // 引脚3 #define I2C_SDA_GPIO_CLK RCC_APB2Periph_GPIOA // 时钟:PA3挂在到APB2总线上 /* EEPROM的引脚高低电平设置 */ #define EEPROM_I2C_SCL_1() GPIO_SetBits(I2C_SCL_GPIO_PORT, I2C_SCL_GPIO_PIN) // 设置SCL引脚为高电平 #define EEPROM_I2C_SCL_0() GPIO_ResetBits(I2C_SCL_GPIO_PORT, I2C_SCL_GPIO_PIN) // 设置SCL引脚为低电平 #define EEPROM_I2C_SDA_1() GPIO_SetBits(I2C_SDA_GPIO_PORT, I2C_SDA_GPIO_PIN) // 设置SDA引脚为高电平 #define EEPROM_I2C_SDA_0() GPIO_ResetBits(I2C_SDA_GPIO_PORT, I2C_SDA_GPIO_PIN) // 设置SDA引脚为低电平 /* STM32读取EEPROM设备的数据 */ #define EEPROM_I2C_SDA_READ() GPIO_ReadInputDataBit(I2C_SDA_GPIO_PORT, I2C_SDA_GPIO_PIN) /* I2C的GPIO端口初始化 */ void I2C_GPIO_CONFIG(void); /* I2C产生起始信号 */ void I2C_START(void); /* I2C产生结束信号 */ void I2C_STOP(void); /* 产生应答信号 */ void I2C_ASK(void); /* STM32读EEPROM的数据时,EEPROM产生非应答信号 */ void I2C_NOASK(void); /* 等待EEPROM的应答信号:应答置0,非应答置1 */ uint8_t I2C_WAIT_ASK(void); /* STM32写一个字节数据到EEPROM */ void I2C_WRITE_BYTE(uint8_t data); /* STM32读EEPROM的一个字节 */ uint8_t I2C_READ_BYTE(void); #endif /* __BSP_I2C_H__ */
(2)bsp_i2c_gpio.c
#include "./i2c/bsp_i2c_gpio.h"
/* 延迟时间 */
static void i2c_Delay(void)
{
uint8_t i;
/*
下面的时间是通过"逻辑分析仪"测试得到的。
工作条件:CPU主频72MHz ,MDK编译环境,1级优化
循环次数为10时,SCL频率 = 205KHz
循环次数为7时,SCL频率 = 347KHz, SCL高电平时间1.5us,SCL低电平时间2.87us
循环次数为5时,SCL频率 = 421KHz, SCL高电平时间1.25us,SCL低电平时间2.375us
*/
for (i = 0; i < 10; i++);
}
/* I2C的GPIO端口初始化 */
void I2C_GPIO_CONFIG(void)
{
/* GPIO结构体 */
GPIO_InitTypeDef GPIO_InitStructure;
/* 打开时钟 */
RCC_APB2PeriphClockCmd(I2C_SCL_GPIO_CLK | I2C_SDA_GPIO_CLK, ENABLE);
/* 实例化SCL结构体 */
GPIO_InitStructure.GPIO_Pin = I2C_SCL_GPIO_PIN; // SCL引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; // 开漏输出模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // I2C一般最大为400k/s,50MHZ足够了
/* 初始化SCL */
GPIO_Init(I2C_SCL_GPIO_PORT, &GPIO_InitStructure);
/* 实例化SDA结构体 */
GPIO_InitStructure.GPIO_Pin = I2C_SDA_GPIO_PIN;
/* 初始化SDA */
GPIO_Init(I2C_SDA_GPIO_PORT, &GPIO_InitStructure);
}
/* I2C产生起始信号:根据信号图来写 */
void I2C_START(void)
{
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_0();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
/* I2C产生结束信号:根据时序图来写 */
void I2C_STOP(void)
{
EEPROM_I2C_SDA_0();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SDA_1();
i2c_Delay();
}
/* STM32读EEPROM的数据时,EEPROM产生应答信号 */
void I2C_ASK(void)
{
EEPROM_I2C_SDA_0();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
/*
释放SDA总线控制权,如果不置1,即拉成高阻态,则SDA为低电平0,
因为SDA线为低电平比高电平优先,所以这条线一直都是低电平,
那么其他EEPROM设备就无法接入SCL线
*/
EEPROM_I2C_SDA_1();
i2c_Delay();
}
/* STM32读EEPROM的数据时,EEPROM产生非应答信号 */
void I2C_NO_ASK(void)
{
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
}
/* 等待EEPROM的应答信号:应答置0,非应答置1 */
uint8_t I2C_WAIT_ASK(void)
{
uint8_t reply;
// 释放SDA线的控制权
EEPROM_I2C_SDA_1();
EEPROM_I2C_SCL_1();
i2c_Delay();
// 判断是应答信号还是非应答信号:看时序图
if(EEPROM_I2C_SDA_READ()==1) // 非应答
{
reply = 1;
}
else // 应答
{
reply = 0;
}
// SCL拉低
EEPROM_I2C_SCL_0();
i2c_Delay();
// 返回信号
return reply;
}
/* STM32写一个字节数据到EEPROM */
void I2C_WRITE_BYTE(uint8_t data)
{
uint8_t i;
// 每次发送一位,循环8次,将一个字节发送完,先发送最高位,后发送低位
for(i=0; i<8; i++)
{
/*
比如:data = 0101 0010,0x80 = 1000 0000,则:
第一次循环:data & 0x80 = 0000 0000,为0,执行:EEPROM_I2C_SDA_0();发送0
data <<= 1;之后,data = 1010 0100
第二次循环:data & 0x80 = 1000 0000,为1,执行:EEPROM_I2C_SDA_1();发送1
data <<= 1;之后,data = 0100 1000
第三次循环:data & 0x80 = 0000 0000,为0,执行:EEPROM_I2C_SDA_0();发送0
data <<= 1;之后,data = 1001 0000
第四次循环:data & 0x80 = 1000 0000,为1,执行:EEPROM_I2C_SDA_1();发送1
data <<= 1;之后,data = 0010 0000
第五次循环:data & 0x80 = 0000 0000,为0,执行:EEPROM_I2C_SDA_0();发送0
data <<= 1;之后,data = 0100 0000
第六次循环:data & 0x80 = 0000 0000,为0,执行:EEPROM_I2C_SDA_0();发送0
data <<= 1;之后,data = 1000 0000
第七次循环:data & 0x80 = 1000 0000,为1,执行:EEPROM_I2C_SDA_1();发送1
data <<= 1;之后,data = 0000 0000
第八次循环:data & 0x80 = 0000 0000,为0,执行:EEPROM_I2C_SDA_0();发送0
经过八次循环之后,发送的数据为:0101 0010,就是一开始要发送的数据data的值
*/
if(data & 0x80)
{
EEPROM_I2C_SDA_1();
}
else
{
EEPROM_I2C_SDA_0();
}
// 每次都延迟,相当于事先将数据准备好,再产生时钟时序,这样数据发送稳定一点
i2c_Delay();
// 每次循环,SCL都产生一个0/1方波,表示在一个时钟周期内发送数据
EEPROM_I2C_SCL_1();
i2c_Delay();
EEPROM_I2C_SCL_0();
i2c_Delay();
// 将刚刚发送的位移掉
data <<= 1;
// 判断如果发送完数据了,就要释放SDA线的控制权
if(i == 7)
{
EEPROM_I2C_SDA_1();
}
}
}
/* STM32读EEPROM的一个字节 */
uint8_t I2C_READ_BYTE(void)
{
uint8_t i;
uint8_t temp = 0;
// 每次发送一位,循环8次,将一个字节发送完,先发送最高位,后发送低位
for(i=0; i<8; i++)
{
// 在每次开始之前先将最后一位腾出位置
temp <<= 1;
// 时钟开始
EEPROM_I2C_SCL_1();
i2c_Delay();
/* 在时钟为高电平时开始读取数据 */
/* 分析过程和写过程类似 */
if(EEPROM_I2C_SDA_READ() == 1)
{
temp += 1;
}
// 每次都延迟,相当于事先将数据准备好,再产生时钟时序,这样数据发送稳定一点
i2c_Delay();
// 时钟结束
EEPROM_I2C_SCL_0();
i2c_Delay();
}
// 返回读取的数据
return temp;
}
(3)main.c
/*
I2C的初始化工程:
包括:端口与引脚的定义、起始信号、终止信号、应答与非应答、读写输入函数等等I2C通信的支持函数
*/
#include "stm32f10x.h"
#include "./i2c/bsp_i2c_gpio.h"
int main(void)
{
}


 浙公网安备 33010602011771号
浙公网安备 33010602011771号