
多尺度特征的Boosting跟踪与POM结合的多摄像头单目标跟踪
论文来自:https://www.taodocs.com/p-37354840.html。 知识点:Boosting跟踪,POM(probabilistic occupancy map),多尺度HOG特征。
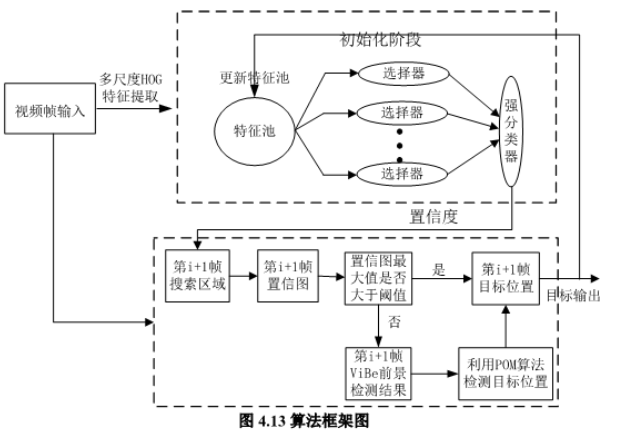
Boosting跟踪:由n个弱分类器,选择器与强分类器组成,主要以目标四周背景为负样本,跟踪目标为正样本,对分类器进行训练。
- n个弱分类器,分别与目标的一个特征相对应,以略小于0.5的概率区分正负样本。
- n个选择器,根据错误率的大小选择弱分类器。
- 强分类器:由n个选择器加权求和得到,权重由弱分类器的分类的错误率决定。
搜索策略:如下图所示,图中红框代表初始目标区域,黄色框是搜索区域(两倍),灰色为前一帧的目标,图中黄色框按照一定的像素间隔搜索,在每个搜索框上计算特征并匹配,最后根据置信图的最大值得到目标位置,然后对分类器进行训练。
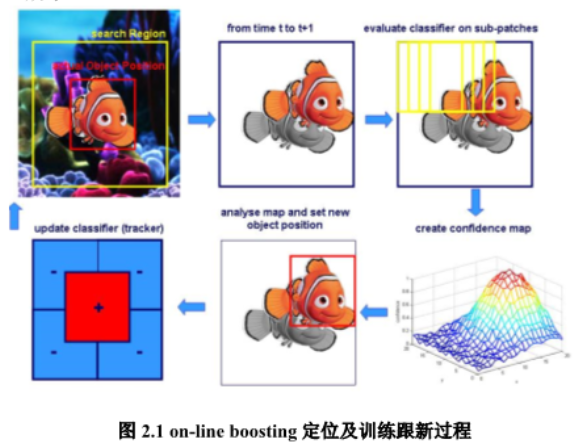
缺点是物体遮挡后,造成跟踪失败。
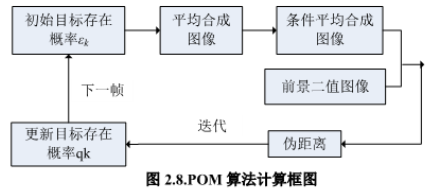
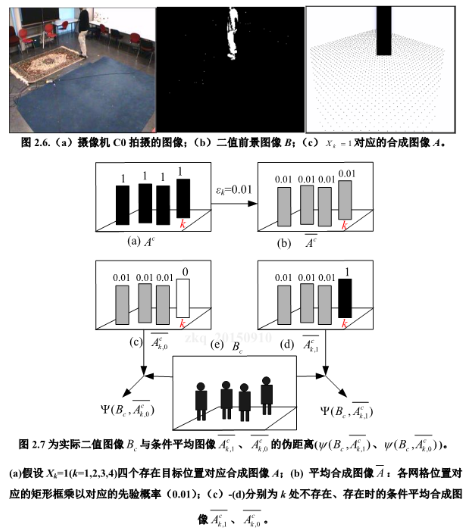
POM(probabilistic occupancy map):核心内容是计算出各个网格位置上目标存在的概率,利用多个摄像头监控平面场景,pom算法首先要等间隔地将地面划分,每个格点代表相应的位置。然后根据输入的二值前景图像,依据数学框架在每个时间帧上算出网格位置(3D)上存在目标的概率,它能在摄像机试图与3D平面上对目标进行精确定位。

例子如下:
前景检测算法:主要分为帧间差分法和背景差分法,其中背景差分法通过对背景进行建模来精确近似背景,应用广泛的有滑动平均模型,高斯混合模型GMM,视觉背景抽取ViBE等建模方法。以下展示四种前景检测算法对POM的影响。
多尺度HOG特征:根据目标信息随机选取block的尺度,位置和长宽比例作为计算hog特征的模板。
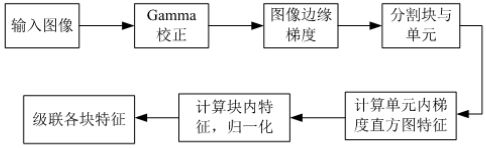
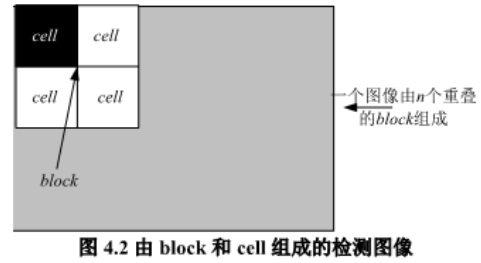
总体框架如下:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号