

ATmega328P定时器详解
写这篇文章,纯粹是想为博客拉点点击量。在博客园,游客访问好像是不计入阅读量的,而作为一个十八线博主,注册用户的访问应该以搜索引擎为主,博客园首页为次,个位数的粉丝就别谈了。
所以,希望各位从搜索引擎点进来的朋友,多多评论,有问题咱们一起讨论。
我写过AVR单片机教程,设计过自己的Arduino板,希望你相信我能给你带来收获。

我不想听你放那么多屁,我只想知道周期为1ms的定时器中断怎么写!
什么是定时器
在ATmega328P单片机中,定时/计数器(Timer/Counter)是这样的组件:它需要一个时钟源,驱动一个8或16位的计数器递增或递减,当计数器等于一个值时,会触发一些操作,如产生中断、翻转引脚电平等。由于定时器的时钟源是系统时钟或外接晶振(一种产生频率精准的波的器件)分频得到的,一旦设置好定时器的工作参数,直到下次调整参数,定时器都会按照预期工作,与CPU执行的代码无关。
为什么要用定时器
之前有过这样的经历:
跟一个优秀作品设计者聊了几句,他说同时控制舵机和扬声器很难控制好延时,扬声器输出的音乐节奏会乱。我第一反应当然是他没有用定时器中断,一问果然如此,并且他不知道中断也不知道定时器。
还有一位同学,写TI计算器的程序。在他的一个作品中,每次循环的计算量不定,循环间隔也不定,导致游戏效果不好。他的解决方法是根据计算量计算出循环最后需要的延时,使得循环间隔基本保持不变。
这种思路是相当优秀的。但是如果有定时器可用的话,编程难度会降低,循环间隔的一致性也会更好,是更加优秀的解决方案。
其实你一直在用定时器
Arduino Uno Rev3的3、5、6、9、10、11号端口可以使用analogWrite和tone函数,它们的功能都是利用定时器实现的。用函数确实方便,但是只知使用而不知其原理就只能停留在技术的表面——Arduino的强大封装对开发者的学习有两面性。
定时器其实不知道什么3号端口,它只知道OC2B。两种表示之间的对应关系如下表:
| 端口编号 | 硬件符号 |
|---|---|
| 3 | PD3(PCINT19/OC2B/INT1) |
| 5 | PD5(PCINT21/OC0B/T1) |
| 6 | PD6(PCINT22/OC0A/AIN0) |
| 9 | PB1(PCINT1/OC1A) |
| 10 | PB2(PCINT2/SS/OC1B) |
| 11 | PB3(PCINT3/OC2A/MOSI) |
寄存器
寄存器是开发者与硬件打交道的方式。从编程的语法上,可以把寄存器当作是变量,可以对它赋值,也可以读取它的数值。
寄存器中的位有几种不同的组织结构,它们的存取方式也不尽相同:

TCCR1B寄存器中有4组参数:ICNC1、ICES1、WGM1[3:2]、CS1[2:0]。现在你完全无需理解这些字母的含义,但是得对这些数字有个概念:WGM1[3:2]表示从WGM13到WGM12;TCCR1B中的1表示该寄存器属于定时器1,ICNC1和WGM13等名字中的1也是;CS12中的2表示该位为CS1[2:0]位域(bitfield)中的第2位(最低位为第0位)。
ICNC1和ICES1都是1位的位域,它们的值可以是0或1;WGM1[3:2]是2位的位域,它的值可以是00、01、10、11;CS1[2:0]同理。
你也许一眼就能看出二进制的11在十进制中是3,但是你很可能看不出23对应10111。在Arduino编程中(语言为C++),二进制数可以直接写,无需与十进制或十六进制转换。Arduino提供的方法是B10111,GCC提供的是0b10111(0b前缀字面量是C++14标准才规定的)。后者是我一直以来的习惯。
假如我要把这4个参数分别写为1、0、0b00、0b101,就要写:
TCCR1B = 1 << ICNC1
| 0 << ICES1
| 0b00 << WGM12
| 0b101 << CS10
;
全是0的可以不写,写是为了可读性。ICNC1是寄存器的第7位,所以代码中它的值就是7,其他位同理。
如果要判断ICNC1位是否为1:
if (TCCR1B & 1 << ICNC1)
// ...
如果要读取WGM1[3:2]位:
uint8_t wgm = (TCCR1B & 0b11 << WGM12) >> WGM12;
有的位因为不存在而不能写,如TCCR1B的第5位;有的位即使存在但是只读所以也不能写;有的位域分布于多个寄存器中,如WGM1[3:0],低两位在TCCR1A,高两位在TCCR1B。
除了一个或多个位的位域以外,有些寄存器是整体使用的:

可以直接当变量读写:
OCR0A = 233;
uint8_t ocr0a = OCR0A;
还有16位寄存器,虽然读写不能用一句汇编搞定,但是高级语言层面上可以:

TCNT1 = 10086;
uint16_t tcnt1 = TCNT1;
不超过255的话可以只写低字节TCNT1L。
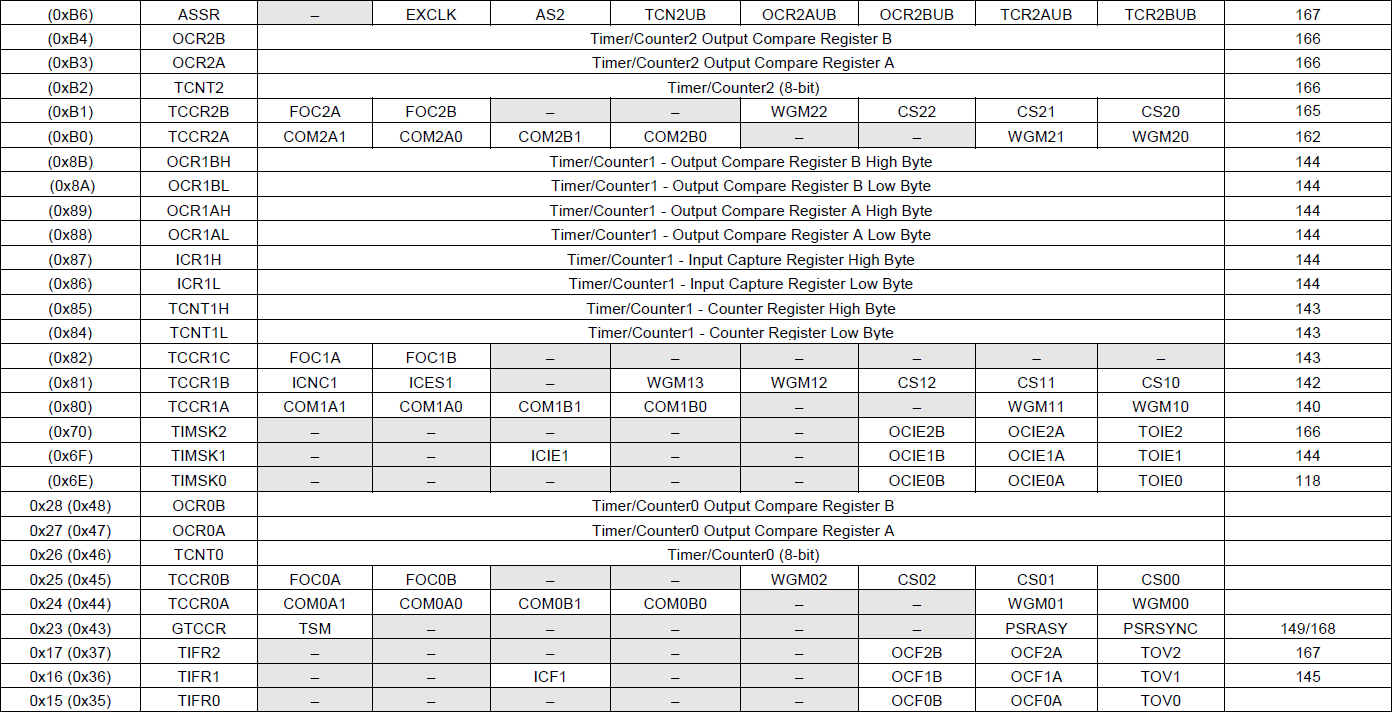
定时器相关寄存器总览:
定时器的工作模式
读数据手册无疑是深入了解单片机的最好方法,可惜很多人没这个耐心,几十页的英语也不是每个人都吃得消的。有些中文书打着介绍AVR单片机的幌子翻译数据手册,不仅没有营养还漏洞百出,我不也推荐。写这篇文章,也有避免后人重蹈覆辙的目的。
当然,除了有代码示例以外,本文再“详解”也详细不过数据手册,不过至少可以让你对定时器有个大致的印象,不致于让你读的时候一头雾水。
ATmega328P有3个定时器:定时器0、定时器1和定时器2(简单粗暴)。0和2都是8位的,2支持异步工作;1是16位的,精度更高,支持更多工作模式。我接触过其他型号的单片机,AVR的定时器是相对简单的。
定时器有3种工作模式:普通模式、CTC模式、PWM模式,其中PWM还分快速PWM、相位矫正(波形居中)PWM、相位与频率矫正PWM(频率可以任取,仅限定时器1)。
先讲各种模式中共通的部分。定时器需要一个时钟源,它可以是:
| 时钟源 | 适用范围 |
|---|---|
| 无 | 所有 |
| \(clk_{I/O} / N, N = 1, 8, 64, 256, 1024\) (\(clk_{I/O}\)为系统时钟,16MHz) |
定时器0/1 |
T0(4)引脚上升/下降沿 |
定时器0 |
T1(5)引脚上升/下降沿 |
定时器1 |
| \(clk_{T2S} / N, N = 1, 8, 32, 64, 128, 256, 1024\) (\(clk_{T2S}\)为系统时钟或外置32kHz晶振) |
定时器2 |
工作模式之间的区别在于计数器的变化方向与范围,介绍之前需要先下3个定义:
| 名称 | 描述 |
|---|---|
BOTTOM |
0,计数器的最小值 |
MAX |
对8位定时器为0xFF,对16位定时器为0xFFFF,计数器的最大可能值 |
TOP |
计数器达到这个值时,可能会被清零,或变化方向改变 对定时器0和2,可以为 MAX或OCRnA对定时器1,可以为 0x00FF、0x01FF、0x03FF、OCR1A或ICR1 |
-
普通模式中,计数器从
0开始增长到MAX,然后溢出回到0,周而复始。频率为(\(clk\)为定时器时钟频率)\[\frac {clk} {MAX + 1} \] -
CTC模式和快速PWM模式中,计数器从
0开始增长到TOP,然后不再继续增长而是直接回到0,重新开始增长。频率为\[\frac {clk} {TOP + 1} \] -
两种相位矫正PWM模式中,计数器从
0到TOP,再从TOP回到0,如此循环。频率为\[\frac {clk} {2 TOP} \]
计数器比较
当计数器的值与OCRnA或OCRnB相等时,可以对OCnx的电平进行一些操作。
-
所有模式下,
OCnx都可以不连接定时器。 -
非PWM模式下,可以把
OCnx置为低电平、高电平或翻转电平,tone就是这样实现的; -
PWM模式下,有正相和反相两种模式,正相为
OCRnx越大占空比越高,analogWrite就是这样实现的;反相反之;有些配置下OCnA可以被翻转,请参考数据手册。
由于引脚电平可以有宏观表现,我们终于可以开始写代码了。
先试试tone。在9号端口上连接一个蜂鸣器,使用定时器1的CTC模式,产生440Hz方波:
void setup() {
pinMode(9, OUTPUT);
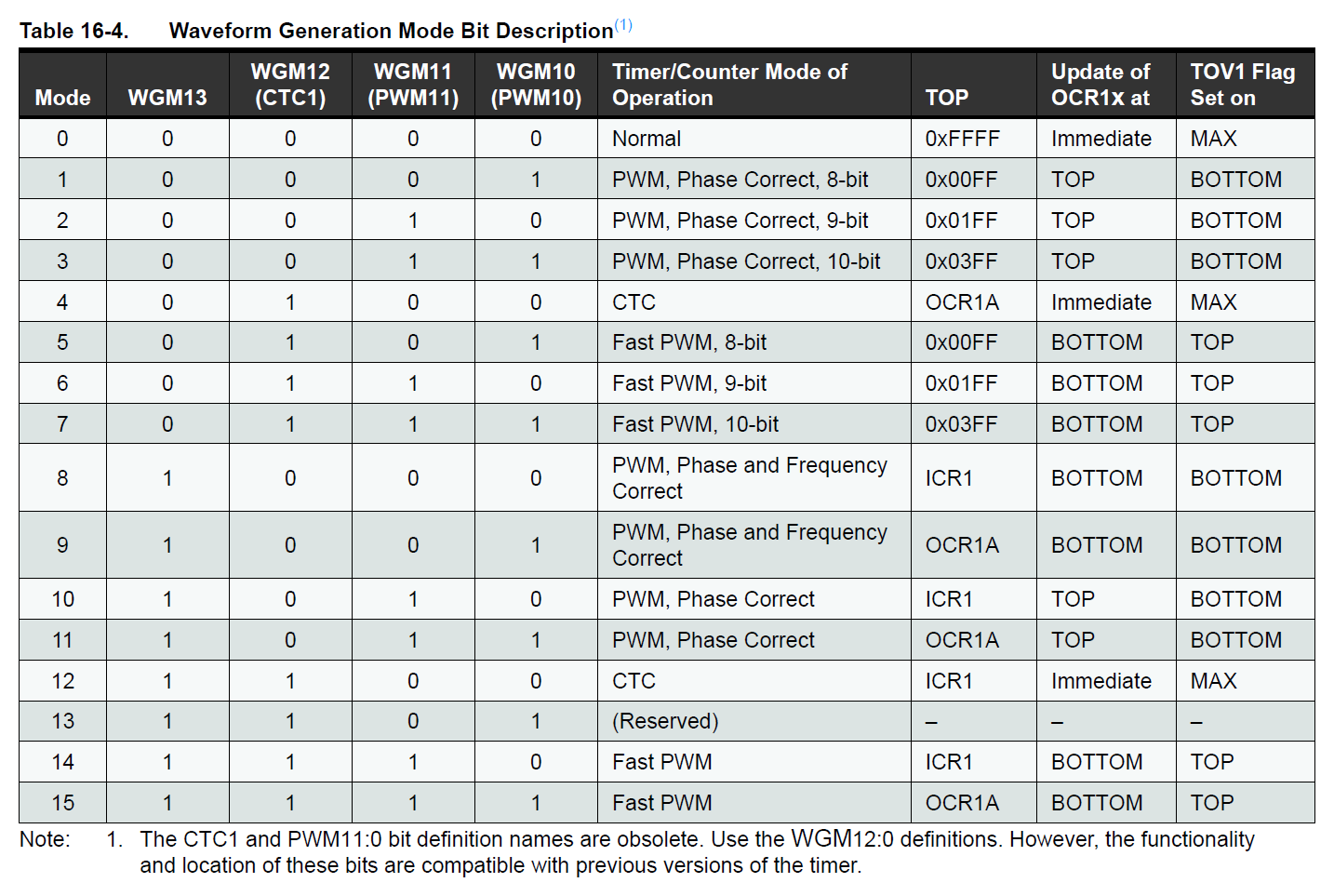
TCCR1A = 0b01 << COM1A0 | 0b00 << WGM10;
TCCR1B = 0b01 << WGM12 | 0b001 << CS10;
OCR1A = 18181;
}
void loop() {
}
OCR1A = 18181是怎么来的呢?每次计数器与OCR1A相等电平翻转,两次为一周期,频率为\(\frac {clk} {2(OCR1A + 1)}\)。先取\(clk\)为不分频试试,算出OCR1A为18181,没有超过最大值65535,因此就取这个。如果超过了,就要把定时器频率下调,直到OCRnx合理为止。
如果要让程序以频率为参数计算出合适的分频系数与OCRnx值,可以参考tone的实现。
再试试analogWrite。在3号端口上连接一个LED,使用定时器2的快速PWM模式,实现呼吸灯的效果:
void setup() {
pinMode(3, OUTPUT);
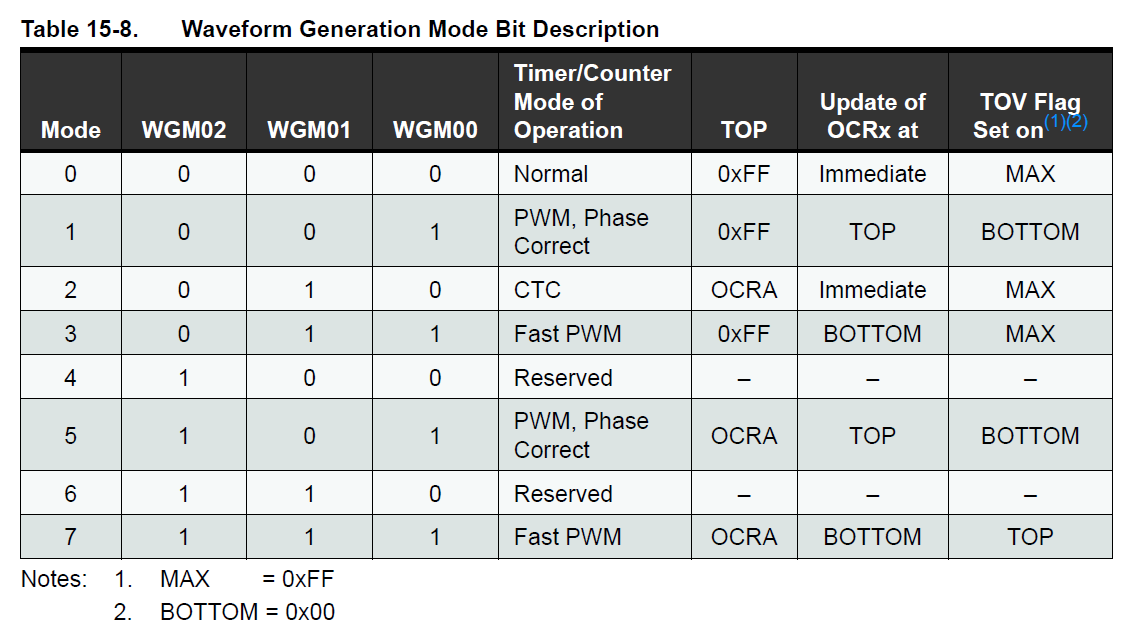
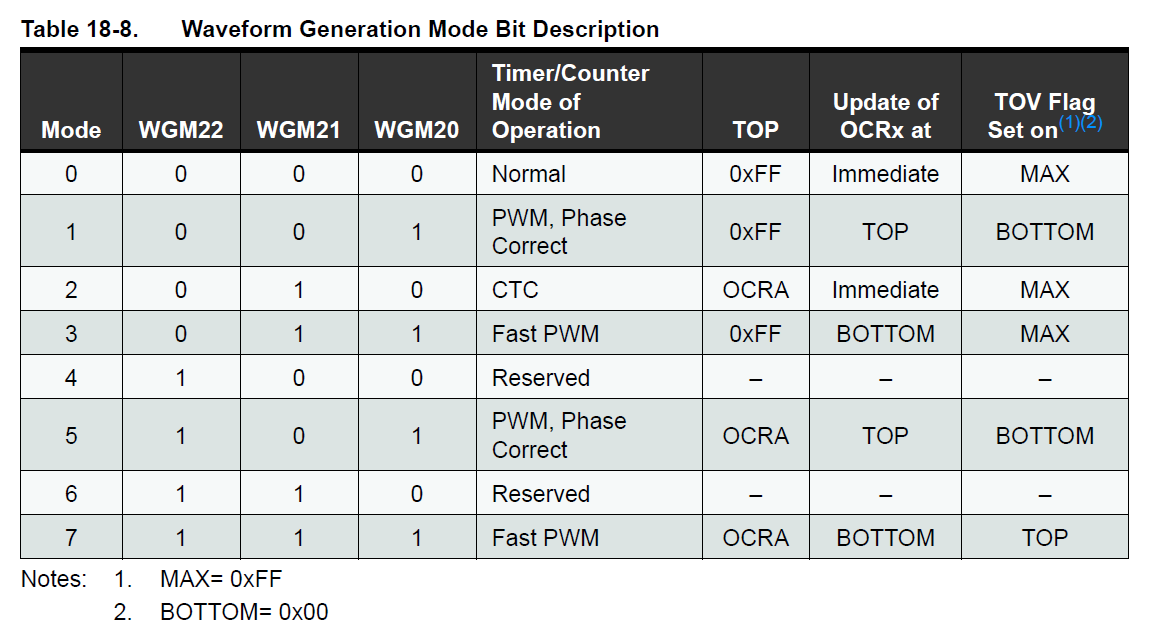
TCCR2A = 0b10 << COM2B0 | 0b11 << WGM20;
TCCR2B = 0 << WGM22 | 0b100 << CS20;
}
int brightness = 0;
int fadeAmount = 5;
void loop() {
OCR2B = brightness;
brightness = brightness + fadeAmount;
if (brightness <= 0 || brightness >= 255)
fadeAmount = -fadeAmount;
delay(30);
}
在快速PWM模式中,正相输出占空比不能为0,反相输出占空比不能为1,如果要达到这两个值,需要断开引脚与定时器的连接,用digitalWrite等方法输出。
定时器中断
懒得写了,我抄我自己:
中断,是单片机的精华。
当一个事件发生时,CPU会停止当前执行的代码,转而处理这个事件,这就是一个中断。触发中断的事件成为中断源,处理事件的函数称为中断服务程序(ISR)。
中断在单片机开发中有着举足轻重的地位——没有中断,很多功能就无法实现。比如,在程序干别的事时接受UART总线上的输入,而
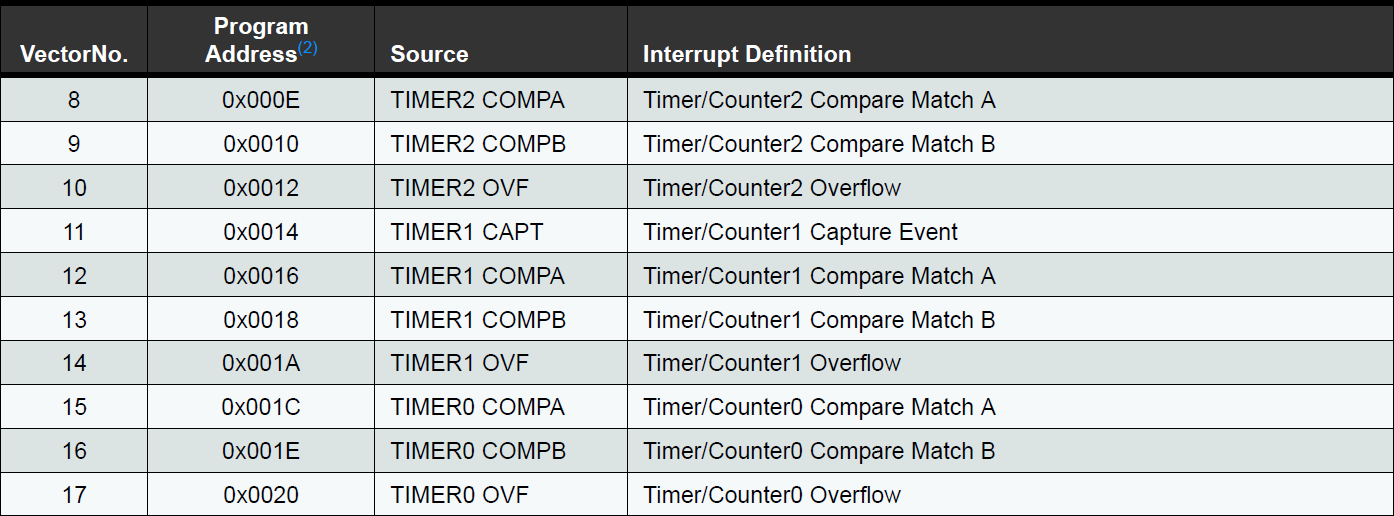
uart_scan_char等函数只会接收调用该函数后的输入,先前的则会被忽略。利用中断,我们可以在每次接受到一个字节输入时把数据存放到缓冲区中,程序可以从缓冲区中读取已经接收的数据。AVR单片机支持多种中断,包括外部引脚中断、定时器中断、总线中断等。每一个中断被触发时,通过中断向量表跳转到对应ISR。如果一个中断对应的ISR不存在,链接器会把复位地址放在那里,如果这个中断被响应程序就会复位(但单片机不会复位)。
那么,我们以前从未写过ISR,但经常改变引脚电平,为什么没有复位呢?因为中断默认是不开启的。要启用一个中断,需要让两个位于不同寄存器中的位为
1,一个是中断对应的中断使能位,每个中断都有各自的位,另一个是全局中断使能位,位于寄存器SREG中,不能直接存取,需要通过定义在<avr/interrupt.h>头文件中的sei()函数开全局中断,相对地,cli()用于关全局中断。
定时器中断同样有着举足轻重的地位——操作系统的任务调度就是在定时器中断中进行的。如果没有中断,CPU就在那自顾自地执行代码,它哪知道什么时候要调度呢?正因为定时器是独立于CPU运行的,时间控制非常精准且不受影响,因而能解决前面优秀作品和计算器游戏中的问题。
什么时候需要定时器中断呢?当你发现没有中断的程序结构不能胜任你的需求时,或者……把所有代码都放进ISR。比如,每1ms产生一次中断,先检测按键是否被按下,根据其情况执行相应操作。
每个定时器都有3个中断源:OVF、COMPA和COMPB(定时器1还有CAPT),分别在计数器溢出、与OCRnA、OCRnB相等时触发。
产生精准的定时器中断,一般使用CTC模式和COMPA中断,分频系数与TOP值的计算方法与上面相同。
void setup() {
pinMode(13, OUTPUT);
TCCR1A = 0b00 << WGM10;
TCCR1B = 0b01 << WGM12 | 0b100 << CS10;
OCR1A = 31249;
TIMSK1 = 1 << OCIE1A;
sei();
}
ISR(TIMER1_COMPA_vect)
{
static bool light = true;
digitalWrite(13, light = !light);
}
void loop() {
}
在这个程序中:
-
WGM1[3:0] = 0b0100,定时器1工作于CTC模式,TOP为OCR1A; -
CS1[2:0] = 0b100,时钟为\(clk_{I/O} / 256\),分频系数\(N = 256\); -
OCR1A为31249; -
TIMSK1中OCIE1A置位,sei()开全局中断,COMPA中断启用; -
ISR(TIMER1_COMPA_vect)为定时器1COMPA中断的函数头,TIMER1_COMPA_vect这个名字可以当成函数来用; -
定时器中断频率为\(f = \frac {clk} {TOP + 1} = \frac {F\_CPU} {N \cdot (OCR1A + 1)} = \frac {16 \times 10^6} {256 \times (31249 + 1)} = 2Hz\)。
一般而言,定时器中断的频率不要超过10kHz,1kHz已经能够应付旋转编码器了。
进入中断后,全局中断会自动禁用,如果中断代码执行期间发生了定时器事件,对应的中断不会触发,而是等到当前中断返回后再处理。可以用sei()开中断,但是要小心代码执行时间接近或超过周期的情况,虽然定时准了,但中断嵌套导致内存耗尽,程序跑飞了,得不偿失。可以考虑另一种时间同步的方法,在loop的最后轮询OCFnA直到它置位:
void setup() {
pinMode(13, OUTPUT);
TCCR1A = 0b00 << WGM10;
TCCR1B = 0b01 << WGM12 | 0b100 << CS10;
OCR1A = 31249;
}
void loop() {
static bool light = true;
digitalWrite(13, light = !light);
while (!(TIFR1 & 1 << OCF1A))
;
TIFR1 |= 1 << OCF1A;
}
这种程序结构有定时作用,但不能中断。频率较高的时候,推荐使用后一种,顶多定时不准,程序还是能运行的。
照顾一下Arduino
Arduino库非常贪心,在setup之前就把所有定时器都开启了(也许你不同意,但我想把这种行为称为“流氓”——想想百度网盘偷了你多少带宽和流量!)。定时器0是时间相关函数的命根,除非你想把它割掉,否则不要动定时器0。如果你不动定时器0,5和6的analogWrite和tone可以照常使用。
如果你要用定时器1,如用以下代码配置周期为1ms的定时器中断:
void init_timer1()
{
TCCR1A = 0b00 << WGM10;
TCCR1B = 0b01 << WGM12 | 0b011 << CS10;
OCR1AL = 249;
TIMSK1 = 1 << OCIE1A;
sei();
}
void setup() {
init_timer1();
// ...
}
ISR(TIMER1_COMPA_vect)
{
// ...
}
void loop() {
// ...
}
需要注意:
-
由于Arduino库在
setup之前动过TCCR1A,不能认为在执行我们的代码时TCCR1A为默认值,因此即使我们想要的是默认值也不能省略。 -
9和10端口不仅analogWrite和tone不能用,digitalWrite也不能用!请直接使用寄存器写引脚电平,参见:AVR单片机教程——数字IO寄存器。
定时器2同理,3和11不能用。
void init_timer2()
{
TCCR2A = 0b10 << WGM20;
TCCR2B = 0 << WGM22 | 0b100 << CS20;
OCR2A = 249;
TIMSK2 = 1 << OCIE2A;
sei();
}
void setup() {
init_timer2();
// ...
}
ISR(TIMER2_COMPA_vect)
{
// ...
}
void loop() {
// ...
}
其他功能
有些工作模式下,向OCRnx写值并不会立即更新它,而是会在计数器达到BOTTOM或TOP时更新,这保证了PWM占空比的正确性,但是CTC模式中OCRnx是立即更新的,可能会错过匹配。
定时器1有输入捕获单元,可以对信号进行计数,计数达到一定值时触发中断。外部中断同样可以捕获引脚电平变化,但是中断是有成本的,信号频率不能太高,而定时器的捕获功能更加强大。
定时器1有额外的ICR1寄存器,作为TOP值可以实现许多特殊的功能,并且由于定时器1是16位的,即使是复用时的精度也比定时器0和2高,见思考题1。
定时器2可以用外置晶振驱动,比较适合实现实时时钟,可以在系统时钟停止的省电状态下工作。
思考题
-
对于同一个定时器,中断与PWM能否同时使用?方波与PWM波能否同时输出?
-
尝试用定时器中断来创造新的PWM通道,频率和精度能实现呼吸灯即可。
-
在STM8单片机中,定时器
TIM1、TIM5、TIM6可以相互控制。ATmega328P能否实现类似的功能?
posted on 2020-04-24 13:56 Jerry_SJTU 阅读(7614) 评论(4) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号