
强化学习原理源码解读003:Actor-Critic和A2C
目录
Policy-based框架的缺点
Valued-based框架的缺点
Actor-Critic结合
算法流程
向Policy Gradient中加入baseline
Q网络和V网络的定义
A2C (Advantage Actor-Critic)
A2C损失函数的构建
源码实现
参考资料
在强化学习中,可以分为如下图所示的两种框架。基于Policy-based框架的算法有Policy Gradient(Sutton 2000)、PPO、PPO2等;基于Value-based框架的算法有DQN(Mnih 2013)、DDQN等;结合这两种框架的算法有Actor-Critic(VR Konda 2000在Policy Gradient之后)、A2C、A3C(2016 DeepMind)、Rainbow等。

|
Policy-based框架的缺点 |
只使用参数化的策略。通过仿真直接估计累计回报值对actor参数的梯度,并向改进方向更新参数。这种方法的一个可能的缺点是梯度估计量可能有一个大的方差。此外,随着策略的变化,对新的梯度的估计独立于过去的估计。因此,没有“学习”,也就是旧信息的积累和巩固。
|
Valued-based框架的缺点 |
完全依赖于值函数近似。通过学习Bellman方程的近似解,然后有希望规定一个接近最优的策略。这些方法是间接的,因为它们不试图直接优化策略空间。这种类型的方法可以成功地构造一个值函数的“好的”近似值,但在结果策略的接近最优性方面缺乏可靠的保证。另外对于连续型动作不宜求解。
|
Actor-Critic结合 |
Actor-Critic算法的学习过程克服了Policy-based框架下计算得到的回报值方差大的问题,大部分情况下,也可以推广到任意状态和动作空间的情况下。
|
算法流程 |

下面将整个算法分解为下面几个小问题进行详述:
■向Policy Gradient中加入baseline
■Q网络和V网络的定义
■A2C (Advantage Actor-Critic)
■A2C损失函数的构建
|
向Policy Gradient中加入baseline |

结合上图,如果所有的动作都会得到正的回报,会存在一个问题,假设有三个动作可以执行abc:
在理想情况下,做梯度上升,会把采用abc的几率都拉高,但是他们对应的R是不一样的,R小的,上升的就小,权重大的就上升的多。因为最终几率的和等于1,所以上升的多的才会上升,上升的小的会下降。
但是在实际过程中,我们做的是采样,那就意味着有的动作会采样不到(有可能是一个很好的动作),那么就会恶性循环,接下来采用这个动作的几率会越来越小。
解决方法:
回报减去一个基础值baseline,让权重有正有负
比如b是一个让回报增加很小的动作(也就是一个比较差的动作),那么他的权重很大程度是小于baseline的,那么梯度上升更新之后,采用b的概率会下降。嵌入baseline后的梯度值如下所示:

当然也可以加入折扣因子:

|
Q网络和V网络的定义 |
这个b可以使用状态价值函数V网络来计算,因为他就是累计回报值这个随机变量数学期望,红色方框内相减之后就会有正有负,达到我们想要的效果。

蓝色下划线部分是执行了a之后的累计回报值的期望可以由Q网络计算。
这时需要学习的网络就有三个:策略网络、Q网络和V网络,如果直接这样做的话会因为网络参数过多,导致优化难度变大的问题,A2C算法就解决了这个问题。
|
A2C (Advantage Actor-Critic) |
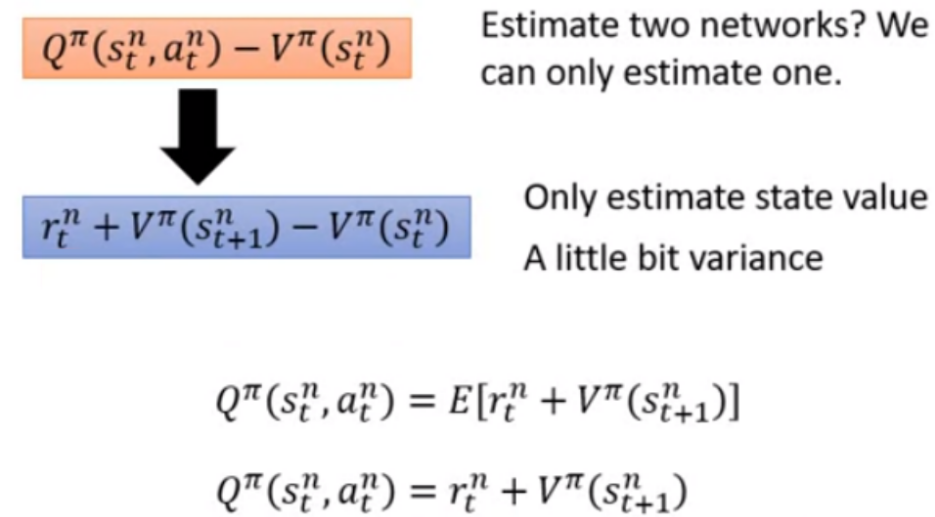
A2C算法指出,我们可以在忍受一定方差的影响的情况下,只估测V,然后用V表示Q
所以我们的网络结构变成:

|
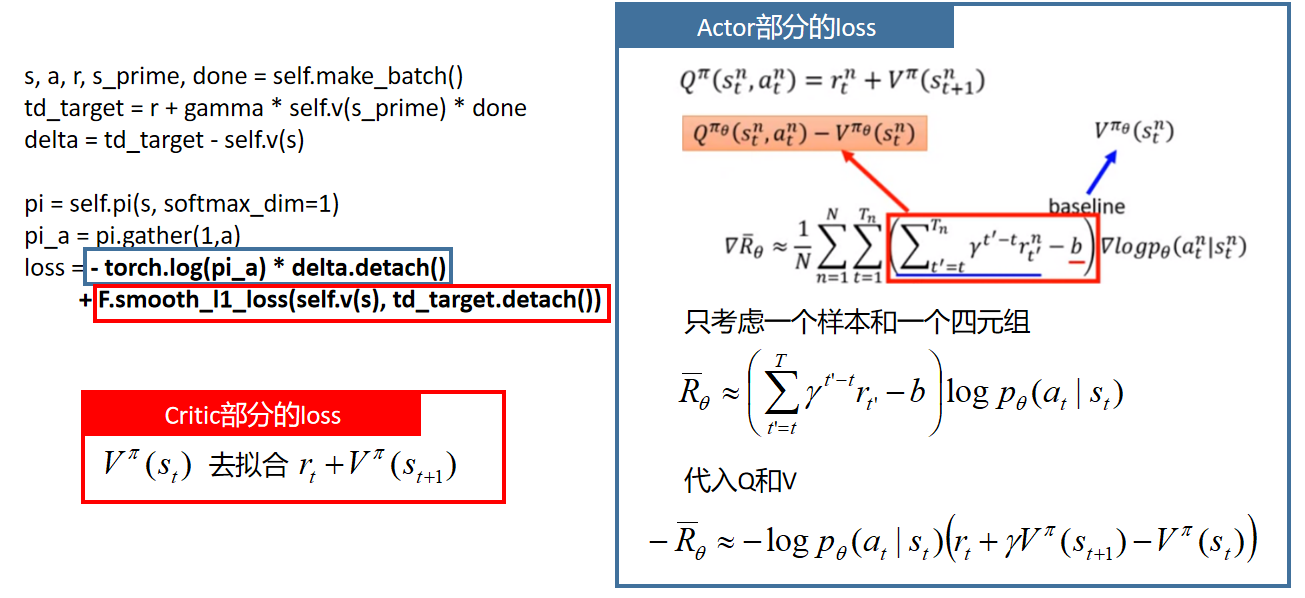
A2C损失函数的构建 |
|
源码实现 |
这里做了一些简练:去掉了分别学习目标网络、去掉了Replay Buffer


import gym import torch import torch.nn as nn import torch.nn.functional as F import torch.optim as optim from torch.distributions import Categorical import matplotlib.pyplot as plt #Hyperparameters learning_rate = 0.0002 gamma = 0.98 n_rollout = 10 class ActorCritic(nn.Module): def __init__(self): super(ActorCritic, self).__init__() self.data = [] self.fc1 = nn.Linear(4,256) self.fc_pi = nn.Linear(256,2) self.fc_v = nn.Linear(256,1) self.optimizer = optim.Adam(self.parameters(), lr=learning_rate) def pi(self, x, softmax_dim = 0): x = F.relu(self.fc1(x)) x = self.fc_pi(x) prob = F.softmax(x, dim=softmax_dim) return prob def v(self, x): x = F.relu(self.fc1(x)) v = self.fc_v(x) return v def put_data(self, transition): self.data.append(transition) def make_batch(self): s_lst, a_lst, r_lst, s_prime_lst, done_lst = [], [], [], [], [] for transition in self.data: s,a,r,s_prime,done = transition s_lst.append(s) a_lst.append([a]) r_lst.append([r/100.0]) s_prime_lst.append(s_prime) done_mask = 0.0 if done else 1.0 done_lst.append([done_mask]) s_batch, a_batch, r_batch, s_prime_batch, done_batch = torch.tensor(s_lst, dtype=torch.float), torch.tensor(a_lst), \ torch.tensor(r_lst, dtype=torch.float), torch.tensor(s_prime_lst, dtype=torch.float), \ torch.tensor(done_lst, dtype=torch.float) self.data = [] return s_batch, a_batch, r_batch, s_prime_batch, done_batch def train_net(self): s, a, r, s_prime, done = self.make_batch() td_target = r + gamma * self.v(s_prime) * done delta = td_target - self.v(s) pi = self.pi(s, softmax_dim=1) pi_a = pi.gather(1,a) loss = -torch.log(pi_a) * delta.detach() + F.smooth_l1_loss(self.v(s), td_target.detach()) self.optimizer.zero_grad() loss.mean().backward() self.optimizer.step() def main(): env = gym.make('CartPole-v1') model = ActorCritic() print_interval = 20 score = 0.0 x = [] y = [] for n_epi in range(5000): done = False s = env.reset() while not done: for t in range(n_rollout): prob = model.pi(torch.from_numpy(s).float()) m = Categorical(prob) a = m.sample().item() s_prime, r, done, info = env.step(a) model.put_data((s,a,r,s_prime,done)) s = s_prime score += r if done: break if score < 500 * print_interval: model.train_net() else: print(score) if n_epi%print_interval==0 and n_epi!=0: print("# of episode :{}, avg score : {:.1f}".format(n_epi, score/print_interval)) x.append(n_epi) y.append(score / print_interval) score = 0.0 env.close() plt.plot(x, y) plt.savefig('pic_saved/res_A2C.jpg') plt.show() if __name__ == '__main__': main()
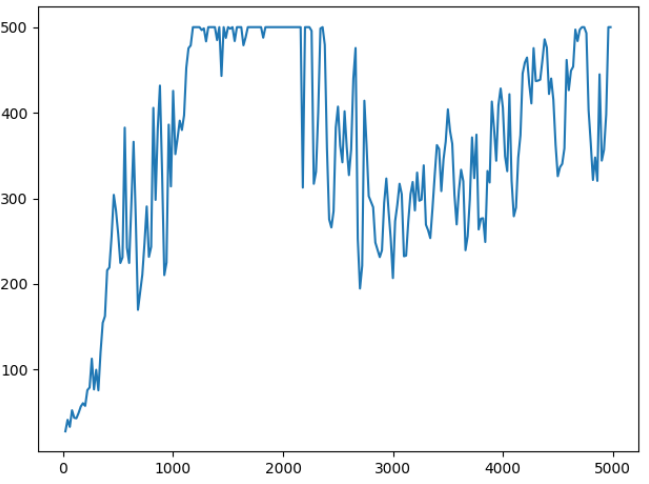
横坐标表示训练轮数,纵坐标表示智能体得分的能力(满分500分)
|
参考资料 |
https://github.com/seungeunrho/minimalRL
https://www.bilibili.com/video/BV1UE411G78S?from=search&seid=10996250814942853843
paper:Actor-Critic Algorithms
paper:Asynchronous Methods for Deep Reinforcement Learning

 浙公网安备 33010602011771号
浙公网安备 33010602011771号