




第3讲三维空间刚体运动
名词解释
1.两个向量的内积外积

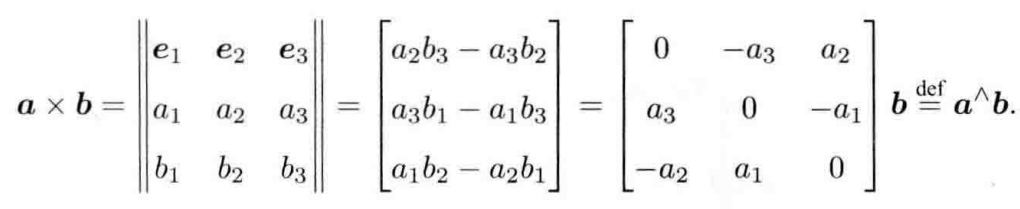
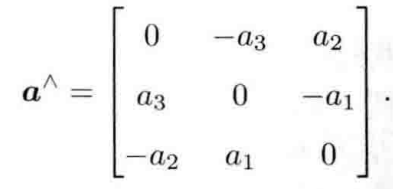
a^b 其中a^表示a的反对称矩阵
2.欧式变换:由旋转和平移组成的变换
以下是同一个向量在不同坐标系的表达方式
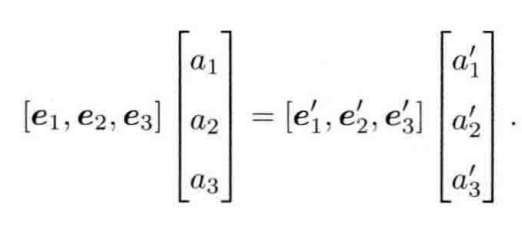
表示的是两边同时左乘
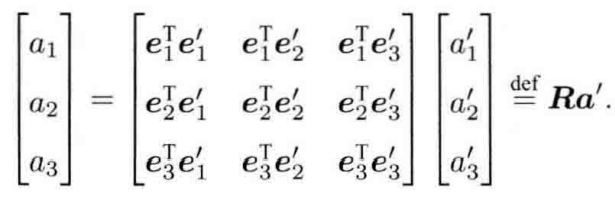
3.旋转矩阵:也就是上述图片中的R,表示从一个坐标系旋转到另外一个坐标系。旋转矩阵是一个行列式为1的正交矩阵。
正交矩阵:逆为自身转置的矩阵。
4.SO(n)是一个特殊正交群,SO(3)表示的就是三维空间的旋转。这样我们就可以通过旋转矩阵直接谈论两个坐标系之间的旋转变换,而不用从基开始谈论。

欧式变换是一个旋转加平移的变换。
上图中R12表示的是:把坐标系2的向量变换到坐标系1中去,t12:表示的是坐标系1原点指向坐标系2原点的向量。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号