剑指OFFER-入门书籍-《算法图解》
前三章,算法基础:二分查找、大O表示法、基本数据结构(数组和链表)、递归。
剩余:具体问题解决技巧、何时采用贪婪或动态规划,散列表的应用,图算,K最近邻。
算法实际应用
GPS: 图算
国际跳棋AI: 动态规划
推荐系统: K最近邻
游戏开发: 图算
有限时间不可解
概念: NP完全问题, NP不完全问题
二分查找
使用二分查找的前置条件: 有序列表
运行效率: O(logn)
对数运算是幂运算的逆运算, log(10)100=2, log(2)1024=10, log(2)8=3, log100≈7, log10亿≈30 log默认以2为底。
可汗学院有一个不错的讲解对数的视频
基本运行规律:
- 查找元素a
- low=低位, high=高位
- 每次从中间开始检查, mid=(low+high)/2
- 如果元素a大于mid位置的元素, low=mid+1, 进入第3步
大O表示法
特点: 指出了最糟糕情况下的运行时间
常见大O运行时间:
- O(logn) - 对数时间
- O(n) - 线性时间
- O(n*logn), 包括快排
- O(n²), 包括选择排序
- O(n!), 旅行商问题非常慢
- O(1) - 常量时间
算法速度指的并非时间,而是操作数的增速,随着输入规模的增加,运行时间将以什么样的速度增加。
拓展:精确化算法耗时
假设线性时间A=O(n)=10msn (假设很简单的操作10ms完成n次)
假设对数时间B=O(logn)=1slogn (假设操作较复杂1s完成logn次)
求A和B的交点,n=100logn, 也就是2的(n/100)次方等于n的问题求解约等于996
那么当小于该交点时(小数据量)时,A更有利,反之B更有利。
const f = (n) => Math.round(Math.pow(2, n/100)) == n) ? n : f(n+1); n取2以上
拓展: 最好情况和最快情况
对于n: 最好为1,最坏为n
- 最差情况:逆排序数组使用选择排序,为n
- 最优情况:数组接近排序要的效果,调换个别次序,为1
对于logn: - 最差情况:已排序数组,基准值选端点值,logn将变成n
- 最优情况:已排序数组,基准值选中间,为logn
也就是说:
- 非常混沌且大的数组,选logn
- 几乎接近已排序状态的数组,选n
- 几遍简单的交换无法解决排序的数组,选logn
旅行商问题
相同性质的问题: 球队比赛问题
问题: 5个城市之间旅行,确保旅程最短
可能的排列方式: 5!=120, 6!=720, 7!=5040
数组和链表
数据访问方式: 随机访问(数组快)、顺序访问(链表相比数组无需整块内存,擅长(插入和删除)
可以区分化的场景:
- 洗摞成一叠的盘子(链表)
- 服务员在队尾添菜单厨师在队首取出菜单做菜(链表)
- 从静态存储的一堆用户名中进行查找(数组)
- 混合数据存储-链表数组,数组包含26个字母元素,每个元素指向一个字母打头的用户名链表,查的较快、易于修改
选择排序(O(n²))
复杂度=((n-1) + (n-2) + ... + 1) = n(n-1)/2
问题: 将乱序列表排成有序表
基本运行规律:
- 建立一个空数组arr
- 从列表中挑最大的放到arr中
- 列表长度-1,进行第2步
递归
经典问题: factorial阶乘
基本运行规律:
- 给定数n
- 给定函数f(n)=n*f(n-1), f(1)=1, n为非零正整数
- 计算结果f(n)
const f = (n) => n == 1 ? n : n * f(n-1)
要点:
- 基线条件(base case, 如上面的如果 n等于1 返回 1)
- 递归条件(recursive case, 如上面的如果 n不等于1 返回 n*f(n-1))
启发问题:将数组求和使用递归实现(函数式编程思想)
- 数组arr=[a,b,c]
- sum(arr)=arr.pop() + sum(arr)
- const sum = (arr) => arr.length == 1 ? arr[0] : arr.pop() + sum(arr)
- 基线条件:数组长度不为0
栈
调用栈(洗盘子)基本逻辑:
- 先调用函数A,后调用函数B
- 函数A内包含函数C
- 函数B内包含函数A
调用栈顺序(左边是底,右边是顶):BACAC
特点:
- 像弹夹,只有1个开口,先进去(压入)后出来(弹出),先入后出
- 每个函数调用都会占用一定内存
- 如果调用栈太长占用大量内存,可以使用尾递归或转为循环优化
快速排序(O(nlogn))
核心思想:分治策略(分而治之,divide and conquer,D&C)
效率:O(nlogn)
和其他方法的关联:使用递归
分治
分治经典问题:均等划分土地(长m宽n)为方块,并且使得方块最大,求格子多大有多少块(切格子, 欧几里得算法、辗转相除法、最大公约数)
基本运行规律:
- 找基线条件,求得最小方块格子的前一个格子长边为短边的整数倍(实质就是寻找最大公约数)
- 分解问题(缩小规模)
func 最小边(长边m, 短边n) {
if (m % n == 0) return n
else {
m = max(m-n, n)
n = min(m-n, n)
return 最小边(m, n)
}
}
const f = (m, n) => {
if (m < n) {
c = m;
m = n;
n = c;
}
return (m % n == 0) ? n : f(m-n, n)
快排
C语言标准库:qsort
核心:性能高度依赖基准值
基本运行规律:
- 给定乱序数组arr
- 确定基线条件: 数组为空或只含1个元素(无法再切分)
- 确定基准值n(可以是arr[0],arr[mid],arr[arr.length-1])
- arr根据基准值分为arr_left(小)和arr_mid(中)和arr_right(大), 分别进行第3步
const f = (arr) => {
const b = arr.length;
if (b < 2) return arr; // 基线也可以用位运算 b | 1 === 1
const index = b % 2 === 0 ? b/2 : (b+1)/2;
const pivot = arr[index];
let arrleft = []; let arrright = []; let arrmid = [pivot];
for (let i = 0; i < arr.length; i++) {
if (arr[i] < pivot) arrleft.push(arr[i]);
else if (arr[i] > pivot) arrright.push(arr[i]);
// else if (i != index) arrmid.push(arr[i]);
}
// 这样有一个副作用,会默认去重
// 不去重的话在等于时再进行一遍角标判断
return [...f(arrleft), ...arrmid, ...f(arrright)]
}
合并排序
合并排序相比快速排序,受常量影响的时间大得多,快排遇上平均情况的可能性更大。
散列表
查找时间为O(1)
散列函数,f(x)=y,一个x映射一个y。
散列函数必须满足的基本要求:
- 数据一致性。每一个输入对应一个确定的输出。
- 不同的输入映射不同的输出。
散列函数的工作原理:
- 总将相同的输入映射到相同的索引。
- 将不同的输入映射到不同的索引。
- 散列函数知道数组有多大,只返回有效的索引。(如数组包含5个元素,散列函数就不会返回无效索引100)
散列函数+数组=散列表(hash table)
数组、链表都直接映射到内存,散列表更复杂,它使用散列函数来确定元素的存储位置。
在复杂数据结构中,散列表(也叫散列映射、映射、字典、关联数组)最有用,速度很快。
- Python-提供的散列表叫字典(dict())
- JavaScript-提供的散列表叫对象(Object.create(null))
实际应用:DNS解析(DSN resolution)、缓存
缓存的两个优点:
- 速度更快
- 计算更少
总结,散列表适合于:
- 模拟映射关系
- 防止重复
- 缓存/记住数据
散列表本身是无序的,因此添加键-值对的顺序无关紧要。
散列函数核心-防冲突(anti-collision)
简单的散列函数:
- 字母表顺序分配数组位置
- 相同首字母的单词存储发上冲突,最简单的解决办法:
- 如果两个键映射到同一个位置,就在该位置存储一个链表
- 缺点:性能差,散列表可能分布不均匀,访问链表上的数据时速度变慢(由O(1)变到O(n),链表越长速度越慢),
理想的情况:散列函数将每个键均匀地映射到散列表的不同位置
散列表的性能:
- 查找速度(获取给定索引处的值)于数组一样快
- 插入和删除速度与链表一样快
在最糟情况下,各种速度都很慢,所以需要避开最糟情况(防冲突),它需要:
- 较低的填装因子(基线条件:填装因子>0.7,操作:调整散列表长度)
- 良好的散列函数
填装因子=散列表包含的元素数/位置总数
填装因子>1意味着元素数量超过数组位置数,一旦填装因子开始增大,就需要在散列表中添加位置,这被称为调整长度(resizing)。
假设填装因子已经相当满(3/4),就需要调整长度,创建一个更长的新数组(通常为1倍),再使用hash函数将所有元素插入到新的散列表中。
启发:
- 电池尺寸到功率的映射,其中电池尺寸为A、AA、AAA和AAAA。可将字符串的长度作为索引。
- 将每个字符映射到一个素数:a=2,b=3,c=5, d=7,e=11,假如散列表长度为10,字符串bag的索引=(3+2+17)%10=22%10=2。
广度优先搜索(breadth-first search,BFS)
属于图算法。可用于找出两样东西之间的最短距离:
- 国际跳棋AI,计算最少步数;
- 拼写检查器,计算最少编辑多少个地方可修正错频单词。
在所有算法中,图算法时最有用的。
最短路径问题(shorterst-path problem)。解决最短路径问题的算法是 BFS。
最短路径问题的基本步骤:
- 使用图建立问题模型
- 使用广度优先搜索解决问题
图的组成元素:节点(node)、边(edge)
图的简单分类:有向图(directed graph)、无向图(undirected graph)
一个节点直接相连的周围节点被称为邻居。
BFS的直接体现:构建人际关系网,一度关系是朋友,二度关系是朋友的朋友,找人帮忙时就会用到BFS。
BFS图的实现
每个节点都与邻居节点相连,类似于一种“你->Bob”的关系映射,散列表可以让你将键映射到值。
graph["you"] = ["alice", "bob", "claire"]
实现算法工作原理:
- 创建一个队列,用于存储要检查的人
- 从队中弹出一个人
- 检查该人是否是需要的人
4.a 是,完成
4.b 否,将该人的所有邻居都加入队列 - 前往第2步
- 队列空,没找到。
graph = {
'you': ['alice', 'bob', 'claire'],
'alice': ['billy', 'paro'],
'bob': ['martin'],
'claire': ['elon', 'billy'],
'billy': [],
'paro': [],
'martin': [],
'elon': [],
}
const f = () => {
search_queue = [];
search_queue += graph['you'];
while (search_queue) {
person = search_queue.shift()
if (person) return person
else search_queue += graph[person]
}
return null;
}
上面 billy 是 alice 和 claire 的共同朋友,它被检查了两次。
将其标记为已检查且不再检查。否则,假如这里的图关系是 ‘你<->billy’ 可能导致无限循环。
更新算法:
f = () => {
search_queue = [];
search_queue += graph['you'];
searched = [];
while (search_queue) {
person = search_queue.shift()
if (person) return person
else if(person not in searched) {
search_queue += graph[person]
searched.push(person)
}
}
return null;
}
总结:
- 必须按加入顺序检查搜索列表中的人,否则找到的就不是最短路径,因此搜索列表必须是队列;
- 对于检查过的人,务必不要再检查,否则可能导致无限循环。
BFS效率
沿着每条边前行,运行时间=O(Sum(边))
使用队列,将人添加进队列时间固定 O(1),对每个人做的总时间=O(Sum(人))
O(BFS)=O(人数+边数)=O(V+E), V=vertice顶点
拓展-拓扑排序
单向进行的图背后的列表是有序的,其中如果任务A依赖于任务B,A就必须在B后面,这种方式被称为“拓扑排序”。
拓扑排序的有用场景,构建一个有序的任务列表:
- 规划一场婚礼的所有事情
- 创建一个家谱
有向无环加权图最短路径算法——狄克斯特拉算法(Dijkstra's algorithm)
BFS找出的是段数最少(将段数看成“边”)的最短路径。
Dijkstra找出的是时间最少(将时间看成“权重”)最少的最短路径。
注意: BFS注重Min(Sum(边)),Dijkstra注重Min(Sum(权重)), 边最少不代表权重最小,权重最小不代表边最少。
Dijkstra核心:找出图中最便宜的节点,并确保没有到该节点更便宜的路径。
Dijkstra算法步骤:
- 找出“最便宜”节点,可在最短时间内到达的节点。
2.对于该节点的邻居,检查是否有前往它们的更短路径,如果有就更新该节点的邻居开销;
3.重复1,2直至对图中每个节点操作完毕
4.计算最终路径。
属于:权重(weight),加权图(weighted graph),非加权图(unweighted graph)
无向图意味着两个节点彼此指向对方,其实就是环。
Dijkstra 只使用于有向无环图(directed acyclic graph, DAG)
负向边
如果有负权边,就不能用狄克斯特拉算法。可使用贝尔曼-福德算法(Bellman-Ford algorithm)。
Dijkstra算法实现
解决问题:
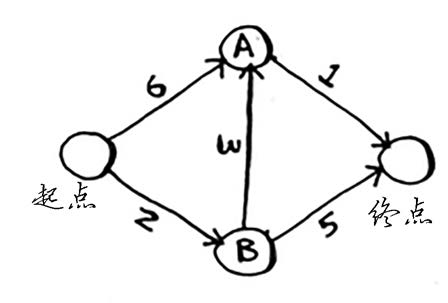
需要三个散列表:Graph、Costs、Parents
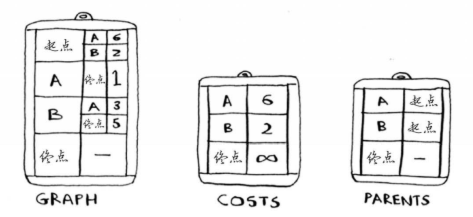
随着算法的进行,将不断更新 costs 和 parents。
graph = {
'start': {
'a': 6,
'b': 2,
},
'a': {
'fin': 1
},
'b': {
a: 3,
fin: 5,
},
'fin': {} // 无任何邻居
}
costs = {
a: 6,
b: 2,
fin: infinity
}
parents = {
a: start,
b: start,
fin: None
}
processed = [] // 用于记录处理过的节点
具体算法步骤:
- 只要有要处理的节点,就
- 获取离起点最近的节点
- 更新其邻居的开销
- 如果有邻居的开销被更新,同时更新其父节点
- 将该节点标记为处理过,前往第1步
node = find_lowest_cost_node(costs)
while node is not None:
cost = costs[node]
neighbors = graph[node];
for n in neighbors.keys():
new_cost = cost + neightbors[n]
if costs[n] > new_cost:
costs[n] = new_cost;
parents[n] = node;
processed.append(node);
node = find_lowest_cost_node(costs);
find_lowest_cost_node
const f = (costs) => {
lowest_cost = INFINITY
lowest_cost_node = None
for node in costs:
cost = costs[node]
if cost < lowestcost and node not in processed:
lowest_cost = cost
lowest_cost_node = node
return lowest_cost_node
}
总结:
- 图,用于解决最短路径问题。
- BFS用于非加权图;
- 狄克斯特拉用于权重为正的加权图;
- 贝尔曼-福德用于包含权重为负的加权图;
贪婪算法
贪婪策略 - 非常简单的问题解决策略:每一步都选择局部最优解。
适合解决的问题:
- 调度问题
- 部分背包/装箱问题
- 旅游价值最大化问题
- 集合覆盖问题
集合
水果集合:鳄梨、西红柿、香蕉
蔬菜集合:甜菜、胡萝卜、西红柿
并集:水果和蔬菜
交集:既属于蔬菜又属于水果(西红柿)
差集:属于水果但不属于蔬菜(鳄梨, 香蕉), 属于蔬菜但不属于水果(甜菜, 胡萝卜)
集合的特点:
- 集合类似列表,但不包含重复的元素
- 集合运算有并、交、差
集合覆盖问题
有时候只需一个能够大致解决问题的算法,此时适合贪婪,实现起来容易其结果又与正确结果接近。
部分问题寻求最优解的时间非常长,此时也适合使用贪婪算法获得一个非常接近的解,如:
集合覆盖问题,找出覆盖50个州的最小广播台集合,具体方法如下:
- 列出每个可能的广播集合,称为幂集(power set),可能的子集有2^n个;
- 在这些集合中,选出覆盖全美50个州的最小集合。
运行时间=O(2^n)
使用贪婪算法解决问题,运行时间=O(n^2)。
具体步骤:
- 简化问题,假设要覆盖的州没那么多,广播台也没那么多;
- 创建一个列表,包含要覆盖的州;
- 使用一个集合来存储最终选择的广播台;
- 计算
4.1 选择覆盖最多的未覆盖州的广播台,存进best_station中
states_needed = set(["mat", "wa", "or", "id", "nv", "ut"])
stations = {
"kone": set(["id", "nv", "ut"]),
"ktwo": set(["wa", "id", "mt"]),
"kthree": set(["or", "nv", "ca"]),
"kfour": set(["nv", "ut"]),
"kfive": set(["ca", "az"])
}
final_stations = set()
while states_needed:
best_station = None
states_covered = set() // 包含该广播台覆盖的所有未覆盖的州
for station, states_for_station in stations.items():
// covered 是一个集合,包含同时出现在 states_needed 和
states_for_station 中的州
covered = states_needed & states_for_station
if len(covered) > len(states_covered):
best_station = station
states_covered = covered
states_needed -= states_covered
final_stations.add(best_station)
其他集合覆盖问题:从一堆球员中挑选符合不同要求/岗位的遴选组件团队。
贪婪算法是易于实现、运行速度快,不错的近似算法。
NP完全问题(Non-deterministic Polynomial)——多项式复杂程度的非确定性问题
NP完全问题:一类没有快速算法的问题。可通过近似算法快速找到近似解。
及时识别NP完全问题,以免浪费时间去寻找解决它们的快速算法。
旅行商问题和集合覆盖问题的一些共同之处:计算所有解从中选出最小/最短的那个,都属于NP完全问题。
聪明人都知道,不可能编写出可快速解决NP问题的算法。
易于解决的问题和NP完全问题的差别通常很小。简言之,没办法判断一个问题是不是NP完全问题,但有一些蛛丝马迹可循:
- 涉及“所有组合”的问题通常是NP完全问题;
- 如果问题可转换成集合覆盖问题或旅行商问题,则肯定是NP完全问题;
- 不能将问题分成小问题,必须考虑各种可能情况。可能是NP完全问题。
- 如果问题涉及序列(如旅行商问题中的城市序列)且难以解决,可能是NP完全问题;
- 如果问题涉及集合(如广播台集合)且难以解决,可能是NP完全问题;
- 元素较少时,算法运行速度非常快,但随元素数量的增加,速度会越来越慢;
动态规划
动态规划原理:
- 先解决子问题,再逐步解决父问题
- 动态规划可在给定约束条件下找到最优解
- 在问题可分解成彼此独立且离散的子问题时
动态规划的缺陷:
- 没法处理背包内单个商品的一部分,必须整件考虑。
- 没有动态规划解决方案的公式。
设计动态规划解决方案:
- 每种动态规划解决方案都涉及网格;
- 单元格中的值通常是要优化的值;
- 每个单元格都是一个子问题,因此应考虑如何将问题分成子问题,这有助于找出网格的坐标轴;
动态规划的实际应用:
- 通过最长公共序列来确定DNA链的相似性,进而判断动物或疾病的相似性;
- git diff命令指出两个文件的差异
- 编辑距离(levenshtein distance)指出两个字符串的相似程度。编辑距离算法用途广泛,从拼写检查到判断用户上传到资料是否是盗版。
- Microsoft Word的断字功能,确保行长一致。
背包问题
- 用简单算法-组合,O(2^n)
- 贪婪算法获取近似解,可能不是最优解
- 最优:动态规划

背包问题的常见约束条件:
- 背包空间容量
- 背包时间容量
| - | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 书 | 3 | 3 | 3 | 3 | 3 | 3 |
| 相机 | 6 | 9 | 9 | 9 | 9 | 9 |
| 食物 | 6 | 9 | 15 | 18 | 18 | 18 |
| 夹克 | 6 | 9 | 15 | 18 | 20 | 23 |
| 水 | 6 | 9 | 15 | 18 | 20 | 25 |
如何绘制网格?
解决背包问题的网格是什么样:
- 单元格中的值是什么?
- 如何将这个问题划分为子问题?
- 网格的坐标轴是什么?
最长公共子串
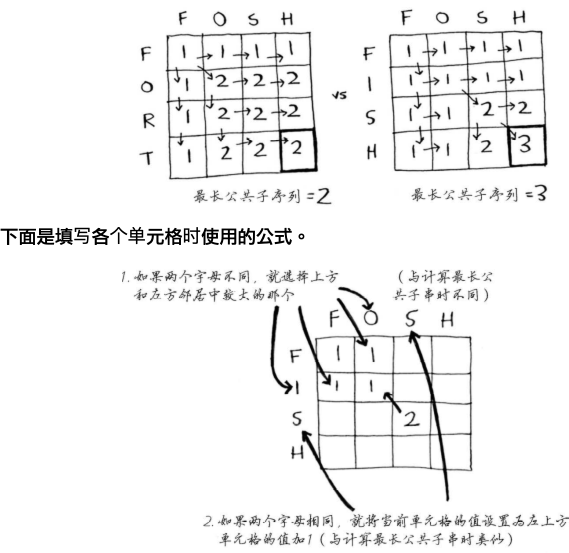
伪代码:
if word_a[i] == word_b[j]: // 两个字母相同
cell[i][j] = cell[i-1][j-1] + 1
else:
cell[i][j] = max(cell[i-1][j], cell[i][j-1])
费曼算法(Feynman algorithm)
步骤:
- 将问题写下来;
- 好好思考;
- 将答案写下来;
K最近邻算法(k-nearest neighbours, KNN)
K最近邻算法 - 分类系统
关键字:特征抽取、回归(即预测数值)
应用案例:
局限性:
特征抽取
比如:
- 水果:个头、颜色
两个坐标点的距离=毕达哥拉斯公式=根号下((x1-x2)^2 + (y1-y2)^2)
回归(regression)
使用KNN来做两项基本工作,分类和回归:
- 分类就是编组
- 回归就是预测结果
实例:面包店预测当天应该烤多少面包:
- 天气指数1-5(1很糟、5很好)
- 是否是周末或节假日(周末或节假日为1,否则为0)
- 有没有活动(1有,0没有)
- 数据:
- A(5,1,0)=300, B(3,1,1)=225, C(1,1,0)=75, D(4,0,1)=200, E(4,0,0)=150, F(2,0,0)=50
使用KNN来预测周末+天气不错预测售出面包数f(4,1,0):
- K=4, 找出K最接近的4个邻居: A,B,D,E
- 求均值=218.75
余弦相似度(cosine similarity), 可修整距离公式带来的“矢量距离远、实际距离近”的问题。
合适的特征
- 与要推荐物紧密相关
- 分类明确的不偏不倚的特征
和机器学习
- OCR(optical character recognition),Google使用OCR来实现图书数字化。
KNN提取数字特征(训练training),遇到新图时提取特征再找出最近的邻居都是谁。
比如:
- 3: 曲线、点、曲线
- 7: 线段、点、线段、点
- 垃圾邮件过滤器-使用简单算法(朴素贝叶斯分类器(Naive Bayes classifier))
研究垃圾邮件中的单词出现频率
一笔带过的内容
树
二叉查找树(BST,binary search tree),解决了二分查找速度快但插入后需重新排序的问题。
- 每个节点的左子节点都比它小,右子节点比它大
- O(BST)=O(logn),最糟为O(n);在有序数组中查找时最糟为O(logn)
- BST的插入、删除速度快得多
| 普通数组 | 有序数组 | 二叉查找树 |
|---|---|---|
| 查找 | O(logn) | [O(1),O(logn)] |
| 插入 | O(n) | O(n) |
| 删除 | O(n) | O(n) |
BST缺点:
- 不能随机访问
红黑树,处于平衡状态的特殊二叉查找树;B树,特殊存储二叉树。
反向索引(inverted index)
诸如查资料时建立的索引(反向的散列表):
- 关键词1|资料1、资料2
- 关键词2|资料2、资料3
- ...
搜索引擎的基本规则。
傅立叶变换
对傅立叶变换的绝佳比喻:
- 给它一杯冰沙,它能告诉你其中包含哪些成分
- 给定一首歌曲,它能将其中的各种频率分离出来
傅立叶变换非常适合用于处理信号。
使用实例:mp3、JPG、地震预测、DNA分析
mp3和JPG(剔除不重要的音符、像素)
并行算法
速度提升是非线性的,单核变双核,算法速度也不可能提高一倍,其原因是:
- 并行性管理开销
- 负载均衡
MapReduce - 映射减肥
MapReduce 是一种流行的分布式算法。
分布式算法,执行数十亿、数万亿行进行复杂的sql查询,此时不能用MySQL,因为数据表行数超过10亿后它处理起来很吃力,此时可以通过hadoop来使用MapReduce。
MapReduce基于两个简单理念:映射(map)和归并(reduce)
概率型算法——布隆过滤器和HyperLogLog
- 检查未发布过的内容
- 判断未搜集过的网页
- 判断URL是否在恶意网站清单中
海量数据如何仍使用散列表,将占用巨量的存储空间。
布隆过滤器是一种概率型数据结构,它的答案可能不对但可能正确。
HyperLogLog类似于布隆过滤器,判断搜索是否包含在日志(历史记录)中。
SHA算法(secure hash algorithm)
给定一个字符串,SHA返回其散列值。
SHA判断比较超大型文件时很有用。
SHA是一系列算法(目前,SHA-0和SHA-1已被发现缺陷)
当前最安全的密码散列函数是bcrypt
局部敏感的散列算法——Simhash
希望如果对一个字符串进行细微修改,生成的散列值只存在细微差别,以通过比较散列值来判断两个字符串的相似程度。
- Google通过Simhash判断网页是否已搜集
- 老师使用Simhash判断论文是否抄袭
- Scribd允许用户上传文档或图书,但不希望上传有版权的内容
检查两项内容的相似度。
Diffie-Hellman 密钥交换
如何对消息进行加密,以便只有收件人能看懂。
- 双方无需知道加密算法,不必会面协商要使用的加密算法
- 破解加密的消息比登天还难
- 公钥和私钥
其代替者:RSA
线性规划
最酷的算法之一。
用于在给定约束条件下最大限度地改善指定的目标。
所有的图算法都可以使用线性规划来实现。
线性规划是一个宽泛的多的框架,图问题只是一个子集。
线性规划使用 Simplex 算法。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号