
第7章 通用定时器介绍及应用
第七章 通用定时器介绍及应用
1. 通用定时器简介
通用定时器(General-Purpose Timers)是 STM32H750VBT6 中功能最丰富、应用最广泛的定时器家族,包含 TIM2-5(32位) 和 TIM9-14(16位) 共 10 个定时器。它们支持向上/向下/中央对齐计数、输入捕获、输出比较、PWM 生成、编码器接口等高级功能,是电机控制、信号测量、精确时序控制的核心外设。与基本定时器(TIM6/7)相比,通用定时器具备完整的通道逻辑,但设计复杂度显著提高。
🔍 核心定位:
- TIM2/TIM5 = 32-bit 通用定时器(最高 4.29s 计时范围)
- TIM3/TIM4 = 高通道数定时器(TIM3 有 4 通道,TIM4 有 3 通道)
- TIM9-14 = 精简版通用定时器(2 通道,资源占用小)
全部位于 APB1_D2(低速)或 APB2(高速)总线,最高时钟 100MHz/200MHz
1.1 核心特性对比(STM32H750VBT6)
| 特性 | TIM2/TIM5 (32-bit) | TIM3/TIM4 (16-bit) | TIM9-14 (16-bit) | 典型应用场景 |
|---|---|---|---|---|
| 计数范围 | 0xFFFFFFFF (4.29G) | 0xFFFF (65535) | 0xFFFF (65535) | TIM2:超长时延时测量 |
| 时钟源 | APB1_D2 (100MHz) | APB1_D2 (100MHz) | APB2 (200MHz) | TIM9-14:高速 PWM |
| 计数模式 | 向上/下/中央对齐 | 向上/下/中央对齐 | 向上/下(无中央对齐) | 电机控制需中央对齐 |
| 通道数 | 4 | TIM3:4, TIM4:3 | 2 | 多路 PWM 需 TIM3 |
| 特殊功能 | BKIN 刹车输入 | 编码器接口 | 简易 PWM | TIM3:增量式编码器 |
| DMA 请求 | 8 个通道 | 8 个通道 | 4 个通道 | 高速数据采集 |
| 中断源 | 10+ 个标志位 | 10+ 个标志位 | 6 个标志位 | 复杂时序控制 |
| 典型精度 | 5 ns @ 200MHz | 10 ns @ 100MHz | 5 ns @ 200MHz | 高速信号生成 |
📌 STM32H750VBT6 独家优势:
- 双时钟域支持:TIM2/5 可配置为 APB1_D2(低功耗)或 APB2(高性能)
- 硬件级联:支持定时器主从模式(
MMS信号触发其他外设) - 死区时间插入(DTG):高级功能(需配合 BDTR 寄存器)
- Q1/Q2 编码器接口:4 倍频模式(最高 50 MHz 计数频率)
1.2 核心功能原理详解
1.2.1 计数模式与时基生成
-
关键公式:
Tperiod = (ARR + 1) × (PSC + 1) / fclk
示例:TIM2 @ 200MHz, PSC=199, ARR=999 → Tperiod = 1000 × 200 / 200,000,000 = 1 μs -
32-bit 优势(TIM2/TIM5):
- 最大计时范围:4.29 秒(ARR=0xFFFFFFFF, PSC=0, fclk=100MHz)
- 避免 16-bit 定时器的溢出修正问题(测量长脉冲时无需软件干预)
1.2.2 输入捕获(Input Capture)
🔹 工作原理:
- 外部信号触发 TIxFPx 引脚
- 捕获单元锁存 CNT 值到 CCR
- 通过 CCER/CCMR 配置边沿检测(上升/下降/双边沿)
🔹 脉宽测量公式:
// 假设上升沿捕获值 = CCR1_up, 下降沿捕获值 = CCR1_down
pulse_width = (CCR1_down - CCR1_up) * T_tick;
period = (CCR1_next_up - CCR1_up) * T_tick;
⚠️ 关键限制:
- 最高捕获频率 ≤ fclk/4(抗抖动滤波影响)
- 长脉冲测量需启用 溢出计数器(软件维护 32-bit 时间戳)
1.2.3 输出比较(Output Compare)
🔹 PWM 生成模式:
-
关键寄存器:
CCMRx.OCxM= PWM 模式选择(110=模式1, 111=模式2)CCRx= 占空比设置(Duty = CCRx / ARR)
-
死区时间配置(高级功能):
TIM1->BDTR = (0x3F << 0) // DTG[7:0] = 63 → 死区时间 79.375ns @ 200MHz
| TIM_BDTR_MOE; // 主输出使能
1.3 关键寄存器操作
1.3.1 核心寄存器与配置流程
| 寄存器 | 关键位域 | 功能 | 配置要点 |
|---|---|---|---|
| CR1 | CEN, DIR, CMS, ARPE | 计数使能、方向、对齐模式 | CMS=01 = 中央对齐 |
| PSC | PSC[15:0] | 16-bit 预分频值 | TIM2/PSC[31:0] 可配 32-bit |
| ARR | ARR[15:0] | 自动重载值 | ARPE=1 时需 EGR.UG 更新 |
| CCMRx | CCxS, OCxM, ICxF | 通道配置(输入/输出模式) | 输入:CCxS=01输出: OCxM=110 |
| CCER | CCxP, CCxE | 通道极性/使能 | CCxE=1 启用通道 |
| DIER | CCxIE, UIE, TDE | 中断/DMA 使能 | TDE=1 使能触发 DMA |
| EGR | UG, CCxG | 软件触发事件 | UG=1 强制更新 |
1.3.2 PWM 生成配置步骤(TIM3_CH1)
// 1. 使能时钟 (RCC)
RCC->APB1LENR |= RCC_APB1LENR_TIM3EN;
RCC->AHB4ENR |= RCC_AHB4ENR_GPIOCEN; // PC6 = TIM3_CH1
// 2. GPIO 配置 (复用推挽)
GPIOC->MODER |= GPIO_MODER_MODE6_1; // [13:12]=10 → AF
GPIOC->OTYPER &= ~GPIO_OTYPER_OT6; // 推挽
GPIOC->OSPEEDR|= GPIO_OSPEEDER_OSPEED6; // 高速
GPIOC->AFR[0] |= 2 << 24; // PC6 = AF2 (TIM3)
// 3. TIM3 基础配置 (1kHz PWM @ 100MHz)
TIM3->PSC = 99; // 100分频 → 1MHz
TIM3->ARR = 999; // 1000计数 → 1kHz
TIM3->CCMR1 = TIM_CCMR1_OC1M_2 | TIM_CCMR1_OC1M_1; // PWM模式1
TIM3->CCER = TIM_CCER_CC1E; // 使能通道1
TIM3->CCR1 = 500; // 50% 占空比
TIM3->CR1 = TIM_CR1_CEN; // 启动计数
1.3.3 HAL 库简化操作
TIM_HandleTypeDef htim;
htim.Instance = TIM3;
htim.Init.Prescaler = 99;
htim.Init.Period = 999;
htim.Init.CounterMode = TIM_COUNTERMODE_UP;
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim);
TIM_OC_InitTypeDef sConfig;
sConfig.OCMode = TIM_OCMODE_PWM1;
sConfig.Pulse = 500; // 占空比
sConfig.OCPolarity = TIM_OCPOLARITY_HIGH;
HAL_TIM_PWM_ConfigChannel(&htim, &sConfig, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_1);
2. 通用定时器使用示例-STM32IDE
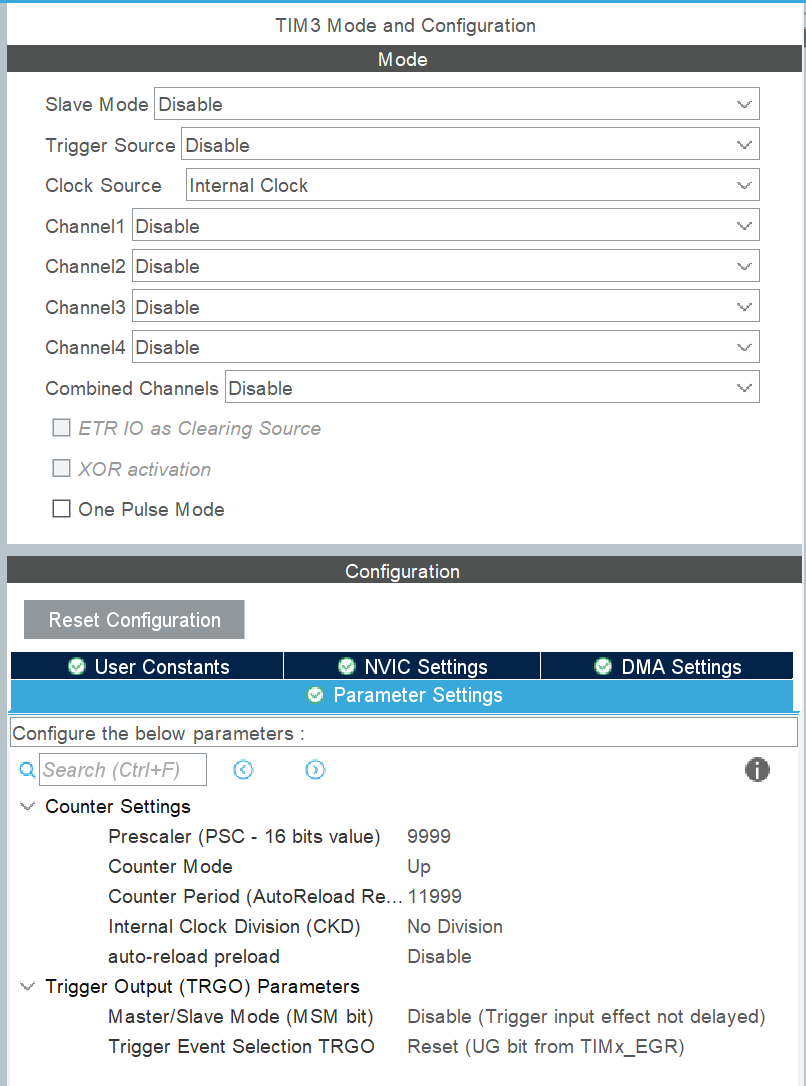
2.1 TIM3中断测试
2.1.1 STM32Cube配置
2.1.2 用户代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim6;
/* TIM3 init function */
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 9999;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 11999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
HAL_TIM_Base_Start_IT(&htim3); // 启动定时器3及其中断
/* USER CODE END TIM3_Init 2 */
}
/* TIM6 init function */
void MX_TIM6_Init(void)
{
/* USER CODE BEGIN TIM6_Init 0 */
/* USER CODE END TIM6_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM6_Init 1 */
/* USER CODE END TIM6_Init 1 */
htim6.Instance = TIM6;
htim6.Init.Prescaler = 9999;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 11999;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM6_Init 2 */
HAL_TIM_Base_Start_IT(&htim6); // 启动定时器6及其中断
/* USER CODE END TIM6_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 3, 1);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspInit 0 */
/* USER CODE END TIM6_MspInit 0 */
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 1, 3);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspInit 1 */
/* USER CODE END TIM6_MspInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspDeInit 0 */
/* USER CODE END TIM3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspDeInit 1 */
/* USER CODE END TIM3_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspDeInit 0 */
/* USER CODE END TIM6_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM6_CLK_DISABLE();
/* TIM6 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspDeInit 1 */
/* USER CODE END TIM6_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32h7xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32h7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "exti.h"
#include "led.h"
#include "tim.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
// 定义全局变量
RingBuffer rx_buffer = { .head = 0, .tail = 0 };
uint8_t received_byte;
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim3;
extern TIM_HandleTypeDef htim6;
extern UART_HandleTypeDef huart1;
extern WWDG_HandleTypeDef hwwdg1;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32H7xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32h7xx.s). */
/******************************************************************************/
/**
* @brief This function handles Window watchdog interrupt.
*/
void WWDG_IRQHandler(void)
{
/* USER CODE BEGIN WWDG_IRQn 0 */
/* USER CODE END WWDG_IRQn 0 */
HAL_WWDG_IRQHandler(&hwwdg1);
/* USER CODE BEGIN WWDG_IRQn 1 */
/* USER CODE END WWDG_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(EXTI_KEY1_Pin);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
HAL_GPIO_TogglePin(LED_RED_Port, LED_RED_Pin);
printf("TIM6 Interrupt Triggered!\n");
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles TIM6 global interrupt, DAC1_CH1 and DAC1_CH2 underrun error interrupts.
*/
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
/* USER CODE END TIM6_DAC_IRQn 1 */
}
/* USER CODE BEGIN 1 */
#if USE_UART_RX_IT
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
// 计算下一个写入位置
uint16_t next_head = (rx_buffer.head + 1) % BUFFER_SIZE;
// 仅当缓冲区未满时存储数据
if (next_head != rx_buffer.tail)
{
rx_buffer.data[rx_buffer.head] = received_byte;
rx_buffer.head = next_head;
}
// 重新启用接收中断
HAL_UART_Receive_IT(&huart1, &received_byte, 1);
}
}
#endif
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN 2 */
bsp_init();
printf("GTIM Interrupt Test\r\n");
MX_TIM3_Init(); // 溢出时间约500ms
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
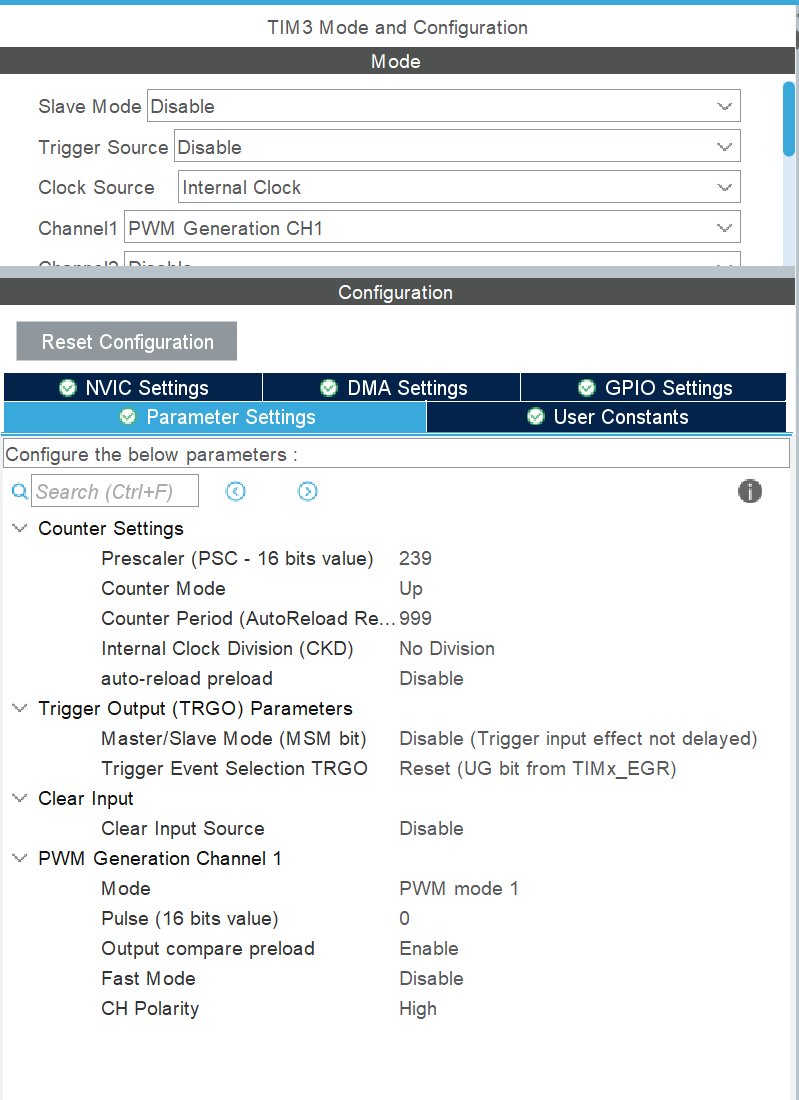
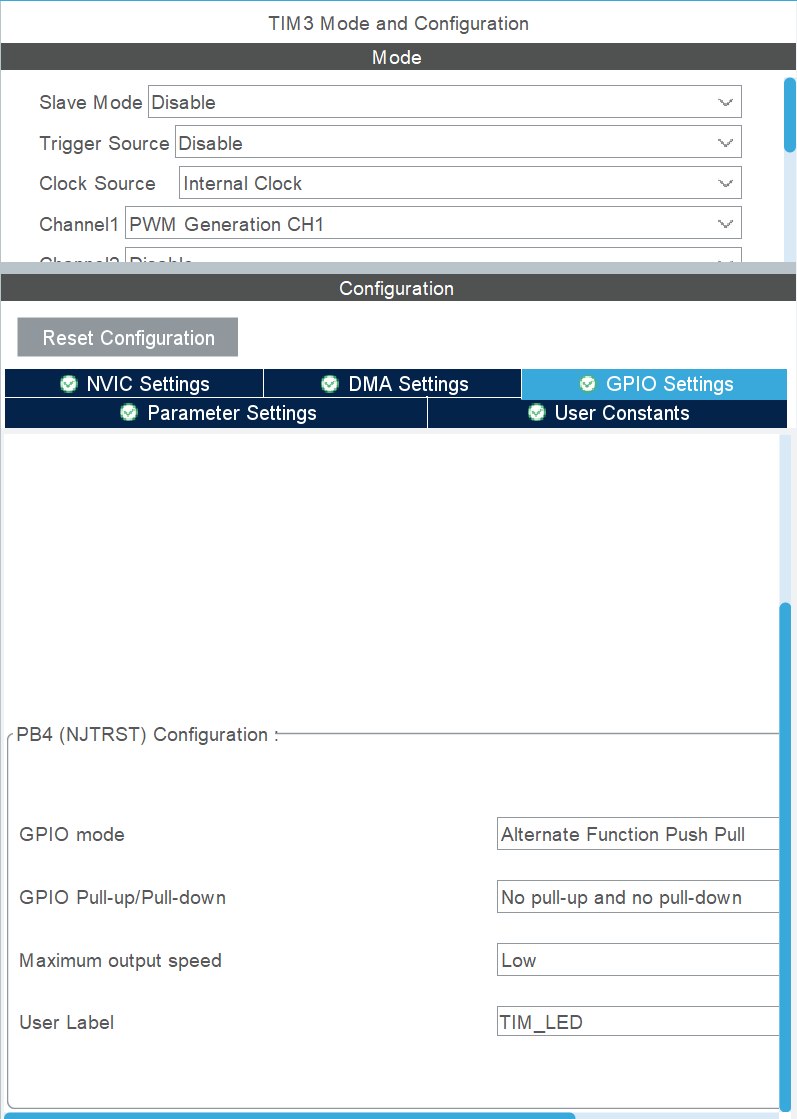
2.2 TIM3_CH1输出PWM
2.2.1 STM32Cube配置
2.2.2 用户代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim6;
/* TIM3 init function */
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 239;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
// HAL_TIM_Base_Start_IT(&htim3); // 启动定时器3及其中断
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1); // 启动PWM通道1
}
/* TIM6 init function */
void MX_TIM6_Init(void)
{
/* USER CODE BEGIN TIM6_Init 0 */
/* USER CODE END TIM6_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM6_Init 1 */
/* USER CODE END TIM6_Init 1 */
htim6.Instance = TIM6;
htim6.Init.Prescaler = 9999;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 11999;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM6_Init 2 */
HAL_TIM_Base_Start_IT(&htim6); // 启动定时器6及其中断
/* USER CODE END TIM6_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 3, 1);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspInit 0 */
/* USER CODE END TIM6_MspInit 0 */
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspInit 1 */
/* USER CODE END TIM6_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspPostInit 0 */
/* USER CODE END TIM3_MspPostInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE();
/**TIM3 GPIO Configuration
PB4 (NJTRST) ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = TIM_LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(TIM_LED_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN TIM3_MspPostInit 1 */
/* USER CODE END TIM3_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspDeInit 0 */
/* USER CODE END TIM3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspDeInit 1 */
/* USER CODE END TIM3_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspDeInit 0 */
/* USER CODE END TIM6_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM6_CLK_DISABLE();
/* TIM6 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspDeInit 1 */
/* USER CODE END TIM6_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
extern TIM_HandleTypeDef htim3;
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
uint16_t pwm_val = 0; // PWM占空比变量
uint8_t dir = 1; // 方向变量,1表示增加,0表示减少
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN 2 */
bsp_init();
printf("GTIM PWM Test\r\n");
MX_TIM3_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_Delay(5);
if(dir)
{
pwm_val++;
}
else
{
pwm_val--;
}
if(pwm_val >= 500)
{
dir = 0;
}
if(pwm_val == 0)
{
dir = 1;
}
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, pwm_val); // 设置PWM占空比
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
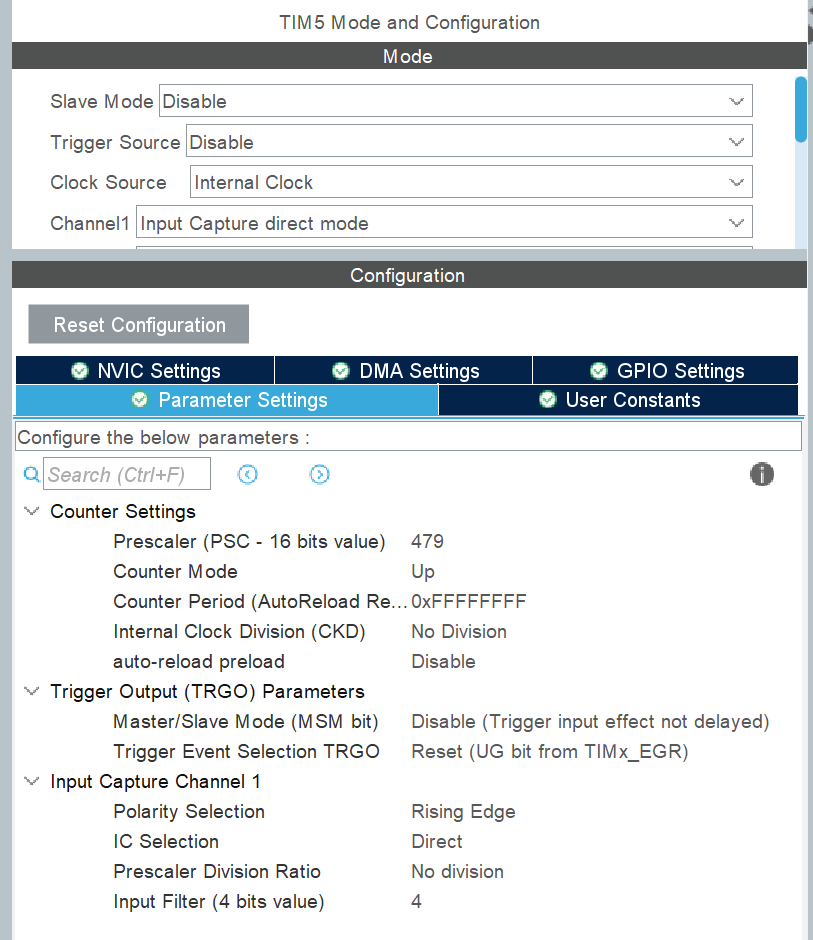
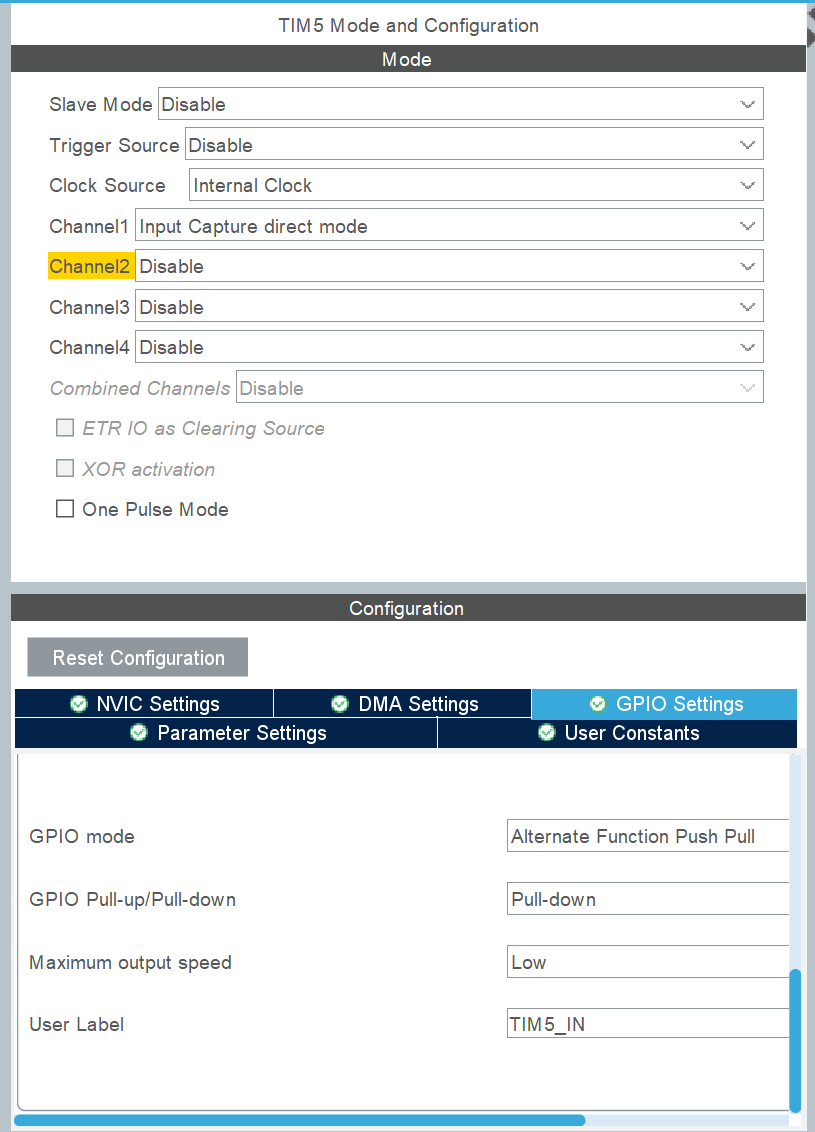
2.3 TIM5_CH1输入捕获
2.3.1 STM32Cube配置
2.3.2 用户代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim5;
TIM_HandleTypeDef htim6;
/* TIM3 init function */
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 239;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
// HAL_TIM_Base_Start_IT(&htim3); // 启动定时器3及其中断
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/* TIM5 init function */
void MX_TIM5_Init(void)
{
/* USER CODE BEGIN TIM5_Init 0 */
/* USER CODE END TIM5_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM5_Init 1 */
/* USER CODE END TIM5_Init 1 */
htim5.Instance = TIM5;
htim5.Init.Prescaler = 479;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 0xFFFFFFFF;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim5.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim5, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 10;
if (HAL_TIM_IC_ConfigChannel(&htim5, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM5_Init 2 */
__HAL_TIM_ENABLE_IT(&htim5, TIM_IT_UPDATE); // 使能更新中断
HAL_TIM_IC_Start_IT(&htim5, TIM_CHANNEL_1); // 启动输入捕获及其中断
/* USER CODE END TIM5_Init 2 */
}
/* TIM6 init function */
void MX_TIM6_Init(void)
{
/* USER CODE BEGIN TIM6_Init 0 */
/* USER CODE END TIM6_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM6_Init 1 */
/* USER CODE END TIM6_Init 1 */
htim6.Instance = TIM6;
htim6.Init.Prescaler = 9999;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 11999;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM6_Init 2 */
HAL_TIM_Base_Start_IT(&htim6); // 启动定时器6及其中断
/* USER CODE END TIM6_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM5)
{
/* USER CODE BEGIN TIM5_MspInit 0 */
/* USER CODE END TIM5_MspInit 0 */
/* TIM5 clock enable */
__HAL_RCC_TIM5_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM5 GPIO Configuration
PA0 ------> TIM5_CH1
*/
GPIO_InitStruct.Pin = TIM5_IN_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM5;
HAL_GPIO_Init(TIM5_IN_GPIO_Port, &GPIO_InitStruct);
/* TIM5 interrupt Init */
HAL_NVIC_SetPriority(TIM5_IRQn, 2, 3);
HAL_NVIC_EnableIRQ(TIM5_IRQn);
/* USER CODE BEGIN TIM5_MspInit 1 */
/* USER CODE END TIM5_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspInit 0 */
/* USER CODE END TIM6_MspInit 0 */
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspInit 1 */
/* USER CODE END TIM6_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspPostInit 0 */
/* USER CODE END TIM3_MspPostInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE();
/**TIM3 GPIO Configuration
PB4 (NJTRST) ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = TIM_LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(TIM_LED_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN TIM3_MspPostInit 1 */
/* USER CODE END TIM3_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspDeInit 0 */
/* USER CODE END TIM3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspDeInit 1 */
/* USER CODE END TIM3_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM5)
{
/* USER CODE BEGIN TIM5_MspDeInit 0 */
/* USER CODE END TIM5_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM5_CLK_DISABLE();
/**TIM5 GPIO Configuration
PA0 ------> TIM5_CH1
*/
HAL_GPIO_DeInit(TIM5_IN_GPIO_Port, TIM5_IN_Pin);
/* TIM5 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM5_IRQn);
/* USER CODE BEGIN TIM5_MspDeInit 1 */
/* USER CODE END TIM5_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspDeInit 0 */
/* USER CODE END TIM6_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM6_CLK_DISABLE();
/* TIM6 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspDeInit 1 */
/* USER CODE END TIM6_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32h7xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32h7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "exti.h"
#include "led.h"
#include "tim.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
// 定义全局变量
RingBuffer rx_buffer = { .head = 0, .tail = 0 };
uint8_t received_byte;
volatile uint8_t cap_sta = 0; // 捕获状态
volatile uint32_t cap_val = 0; // 捕获值
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim3;
extern TIM_HandleTypeDef htim5;
extern TIM_HandleTypeDef htim6;
extern UART_HandleTypeDef huart1;
extern WWDG_HandleTypeDef hwwdg1;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32H7xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32h7xx.s). */
/******************************************************************************/
/**
* @brief This function handles Window watchdog interrupt.
*/
void WWDG_IRQHandler(void)
{
/* USER CODE BEGIN WWDG_IRQn 0 */
/* USER CODE END WWDG_IRQn 0 */
HAL_WWDG_IRQHandler(&hwwdg1);
/* USER CODE BEGIN WWDG_IRQn 1 */
/* USER CODE END WWDG_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(EXTI_KEY1_Pin);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles TIM5 global interrupt.
*/
void TIM5_IRQHandler(void)
{
/* USER CODE BEGIN TIM5_IRQn 0 */
/* USER CODE END TIM5_IRQn 0 */
HAL_TIM_IRQHandler(&htim5);
/* USER CODE BEGIN TIM5_IRQn 1 */
/* USER CODE END TIM5_IRQn 1 */
}
// 输入捕获中断回调
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
static uint32_t last_capture_time = 0;
uint32_t current_time = HAL_GetTick();
// 简单的去抖动:忽略在短时间内连续发生的捕获事件
if (current_time - last_capture_time < 50) // 50ms去抖动时间
{
return;
}
last_capture_time = current_time;
if(htim->Instance == TIM5 && htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1)
{
if((cap_sta & 0x80) == 0)
{
if(cap_sta & 0x40) // 已经捕获到上升沿
{
cap_sta |= 0x80; // 标记捕获完成
cap_val = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
// 重置为上升沿捕获,准备下一次测量
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
}
else // 首次捕获到上升沿
{
cap_sta = 0;
cap_val = 0;
cap_sta |= 0x40; // 标记已捕获到上升沿
__HAL_TIM_DISABLE(htim);
__HAL_TIM_SET_COUNTER(htim, 0);
// 设置为下降沿捕获
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_FALLING);
__HAL_TIM_ENABLE(htim);
}
}
}
}
// 更新中断回调
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM5)
{
if((cap_sta & 0x80) == 0) // 捕获未完成
{
if(cap_sta & 0x40) // 已经捕获到上升沿
{
if((cap_sta & 0x3F) == 0x3F) // 溢出次数达到最大值
{
// 重置为上升沿捕获
TIM_RESET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1);
TIM_SET_CAPTUREPOLARITY(htim, TIM_CHANNEL_1, TIM_INPUTCHANNELPOLARITY_RISING);
cap_sta = 0;
cap_val = 0xFFFF;
}
else
{
cap_sta++; // 增加溢出计数
}
}
}
}
}
/**
* @brief This function handles TIM6 global interrupt, DAC1_CH1 and DAC1_CH2 underrun error interrupts.
*/
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
/* USER CODE END TIM6_DAC_IRQn 1 */
}
/* USER CODE BEGIN 1 */
#if USE_UART_RX_IT
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
// 计算下一个写入位置
uint16_t next_head = (rx_buffer.head + 1) % BUFFER_SIZE;
// 仅当缓冲区未满时存储数据
if (next_head != rx_buffer.tail)
{
rx_buffer.data[rx_buffer.head] = received_byte;
rx_buffer.head = next_head;
}
// 重新启用接收中断
HAL_UART_Receive_IT(&huart1, &received_byte, 1);
}
}
#endif
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
#include "stm32h7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN 2 */
bsp_init();
printf("GTIM In Test\r\n");
MX_TIM5_Init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
if(cap_sta & 0x80) // 捕获完成
{
// 计算高电平时间(微秒)
// 定时器时钟 = 480MHz / (479 + 1) = 1MHz,所以每个计数代表1微秒
uint32_t overflow_count = cap_sta & 0x3F;
uint32_t total_time = overflow_count * 0xFFFF + cap_val;
printf("High Time:%lu us\r\n", total_time);
cap_sta = 0; // 重置捕获状态
}
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
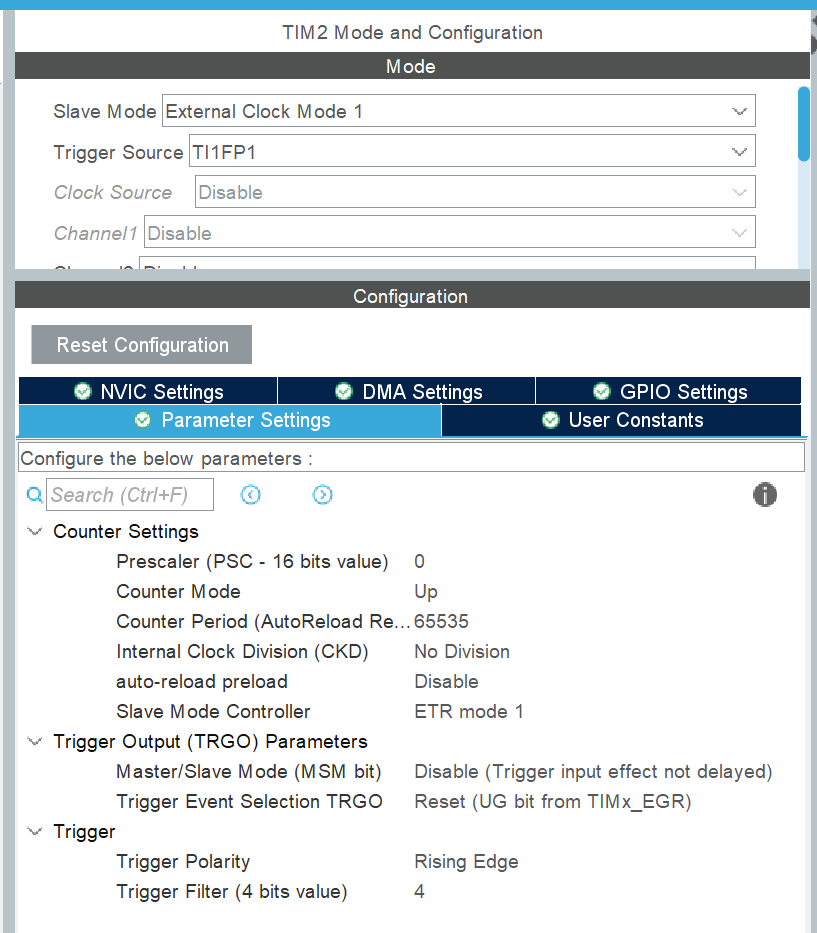
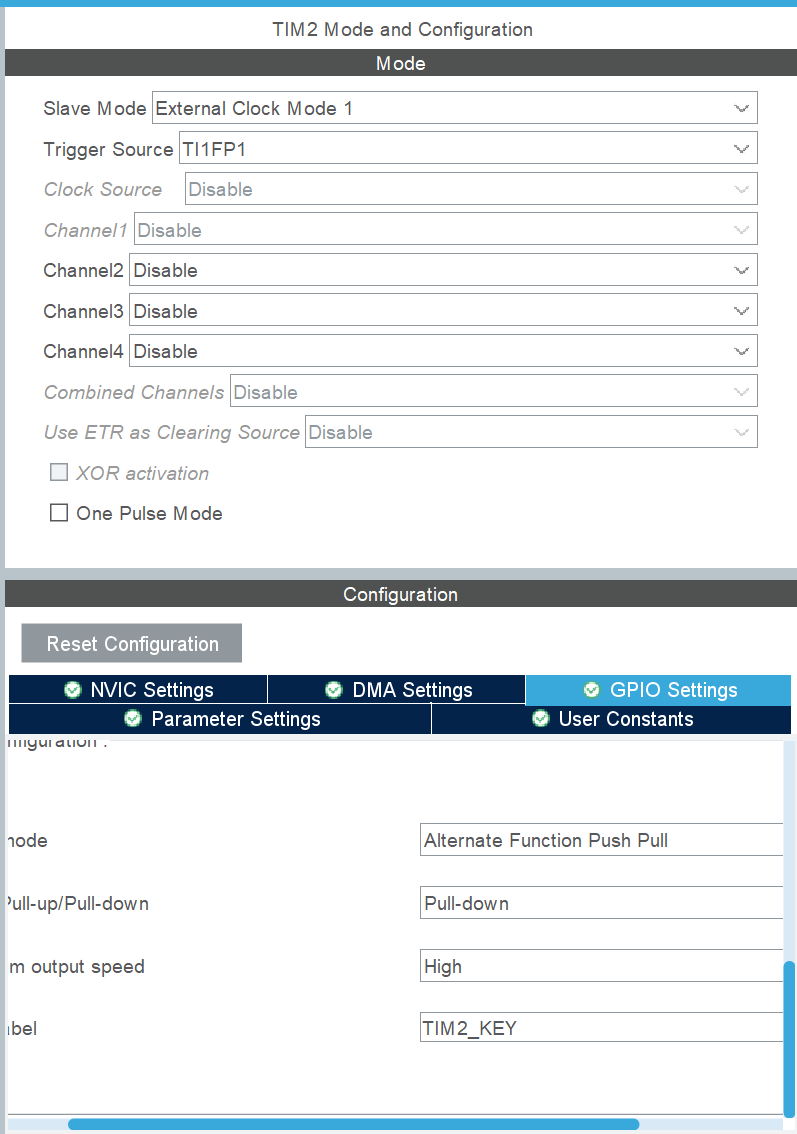
2.4 TIM2_CH1脉冲计数
2.4.1 STM32Cube配置
2.4.2 用户代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file tim.c
* @brief This file provides code for the configuration
* of the TIM instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "tim.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim5;
TIM_HandleTypeDef htim6;
/* TIM2 init function */
void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_EXTERNAL1;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING;
sSlaveConfig.TriggerPrescaler = TIM_TRIGGERPRESCALER_DIV1;
sSlaveConfig.TriggerFilter = 4;
if (HAL_TIM_SlaveConfigSynchro(&htim2, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
__HAL_TIM_ENABLE_IT(&htim2, TIM_IT_UPDATE); // 使能更新中断
HAL_TIM_IC_Start_IT(&htim2, TIM_CHANNEL_1); // 启动输入捕获及其中断
/* USER CODE END TIM2_Init 2 */
}
/* TIM3 init function */
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 239;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
// HAL_TIM_Base_Start_IT(&htim3); // 启动定时器3及其中断
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/* TIM5 init function */
void MX_TIM5_Init(void)
{
/* USER CODE BEGIN TIM5_Init 0 */
/* USER CODE END TIM5_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM5_Init 1 */
/* USER CODE END TIM5_Init 1 */
htim5.Instance = TIM5;
htim5.Init.Prescaler = 479;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 0xFFFFFFFF;
htim5.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim5.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim5) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim5, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim5, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM5_Init 2 */
__HAL_TIM_ENABLE_IT(&htim5, TIM_IT_UPDATE); // 使能更新中断
HAL_TIM_IC_Start_IT(&htim5, TIM_CHANNEL_1); // 启动输入捕获及其中断
/* USER CODE END TIM5_Init 2 */
}
/* TIM6 init function */
void MX_TIM6_Init(void)
{
/* USER CODE BEGIN TIM6_Init 0 */
/* USER CODE END TIM6_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM6_Init 1 */
/* USER CODE END TIM6_Init 1 */
htim6.Instance = TIM6;
htim6.Init.Prescaler = 9999;
htim6.Init.CounterMode = TIM_COUNTERMODE_UP;
htim6.Init.Period = 11999;
htim6.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim6) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim6, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM6_Init 2 */
HAL_TIM_Base_Start_IT(&htim6); // 启动定时器6及其中断
/* USER CODE END TIM6_Init 2 */
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspInit 0 */
/* USER CODE END TIM2_MspInit 0 */
/* TIM2 clock enable */
__HAL_RCC_TIM2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**TIM2 GPIO Configuration
PA0 ------> TIM2_CH1
*/
GPIO_InitStruct.Pin = TIM2_KEY_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM2;
HAL_GPIO_Init(TIM2_KEY_GPIO_Port, &GPIO_InitStruct);
/* TIM2 interrupt Init */
HAL_NVIC_SetPriority(TIM2_IRQn, 2, 2);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspInit 1 */
/* USER CODE END TIM2_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspInit 0 */
/* USER CODE END TIM3_MspInit 0 */
/* TIM3 clock enable */
__HAL_RCC_TIM3_CLK_ENABLE();
/* TIM3 interrupt Init */
HAL_NVIC_SetPriority(TIM3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspInit 1 */
/* USER CODE END TIM3_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM5)
{
/* USER CODE BEGIN TIM5_MspInit 0 */
/* USER CODE END TIM5_MspInit 0 */
/* TIM5 clock enable */
__HAL_RCC_TIM5_CLK_ENABLE();
/* TIM5 interrupt Init */
HAL_NVIC_SetPriority(TIM5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM5_IRQn);
/* USER CODE BEGIN TIM5_MspInit 1 */
/* USER CODE END TIM5_MspInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspInit 0 */
/* USER CODE END TIM6_MspInit 0 */
/* TIM6 clock enable */
__HAL_RCC_TIM6_CLK_ENABLE();
/* TIM6 interrupt Init */
HAL_NVIC_SetPriority(TIM6_DAC_IRQn, 1, 0);
HAL_NVIC_EnableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspInit 1 */
/* USER CODE END TIM6_MspInit 1 */
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspPostInit 0 */
/* USER CODE END TIM3_MspPostInit 0 */
__HAL_RCC_GPIOB_CLK_ENABLE();
/**TIM3 GPIO Configuration
PB4 (NJTRST) ------> TIM3_CH1
*/
GPIO_InitStruct.Pin = TIM_LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(TIM_LED_GPIO_Port, &GPIO_InitStruct);
/* USER CODE BEGIN TIM3_MspPostInit 1 */
/* USER CODE END TIM3_MspPostInit 1 */
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM2)
{
/* USER CODE BEGIN TIM2_MspDeInit 0 */
/* USER CODE END TIM2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM2_CLK_DISABLE();
/**TIM2 GPIO Configuration
PA0 ------> TIM2_CH1
*/
HAL_GPIO_DeInit(TIM2_KEY_GPIO_Port, TIM2_KEY_Pin);
/* TIM2 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM2_IRQn);
/* USER CODE BEGIN TIM2_MspDeInit 1 */
/* USER CODE END TIM2_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM3)
{
/* USER CODE BEGIN TIM3_MspDeInit 0 */
/* USER CODE END TIM3_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM3_CLK_DISABLE();
/* TIM3 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM3_IRQn);
/* USER CODE BEGIN TIM3_MspDeInit 1 */
/* USER CODE END TIM3_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM5)
{
/* USER CODE BEGIN TIM5_MspDeInit 0 */
/* USER CODE END TIM5_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM5_CLK_DISABLE();
/* TIM5 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM5_IRQn);
/* USER CODE BEGIN TIM5_MspDeInit 1 */
/* USER CODE END TIM5_MspDeInit 1 */
}
else if(tim_baseHandle->Instance==TIM6)
{
/* USER CODE BEGIN TIM6_MspDeInit 0 */
/* USER CODE END TIM6_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_TIM6_CLK_DISABLE();
/* TIM6 interrupt Deinit */
HAL_NVIC_DisableIRQ(TIM6_DAC_IRQn);
/* USER CODE BEGIN TIM6_MspDeInit 1 */
/* USER CODE END TIM6_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
// 记录TIM2溢出次数,求总脉冲个数
uint32_t tim2_overflow_count = 0;
// 获取当前计数值
uint32_t tim2_get_count(void)
{
uint32_t count = 0;
count = tim2_overflow_count * 65536 + __HAL_TIM_GET_COUNTER(&htim2);
return count;
}
// 重启计数器
void tim2_restart_count(void)
{
__HAL_TIM_DISABLE(&htim2);
tim2_overflow_count = 0;
__HAL_TIM_SET_COUNTER(&htim2, 0);
__HAL_TIM_ENABLE(&htim2);
}
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
if(__HAL_TIM_GET_FLAG(&htim2, TIM_FLAG_UPDATE) != RESET) // 检查更新中断标志
{
tim2_overflow_count++; // 增加溢出计数
}
__HAL_TIM_CLEAR_FLAG(&htim2, TIM_FLAG_UPDATE); // 清除中断标志
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32h7xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32h7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "exti.h"
#include "led.h"
#include "tim.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
// 定义全局变量
RingBuffer rx_buffer = { .head = 0, .tail = 0 };
uint8_t received_byte;
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern TIM_HandleTypeDef htim2;
extern TIM_HandleTypeDef htim3;
extern TIM_HandleTypeDef htim5;
extern TIM_HandleTypeDef htim6;
extern UART_HandleTypeDef huart1;
extern WWDG_HandleTypeDef hwwdg1;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32H7xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32h7xx.s). */
/******************************************************************************/
/**
* @brief This function handles Window watchdog interrupt.
*/
void WWDG_IRQHandler(void)
{
/* USER CODE BEGIN WWDG_IRQn 0 */
/* USER CODE END WWDG_IRQn 0 */
HAL_WWDG_IRQHandler(&hwwdg1);
/* USER CODE BEGIN WWDG_IRQn 1 */
/* USER CODE END WWDG_IRQn 1 */
}
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(EXTI_KEY1_Pin);
/* USER CODE BEGIN EXTI1_IRQn 1 */
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
/* USER CODE BEGIN TIM3_IRQn 0 */
/* USER CODE END TIM3_IRQn 0 */
HAL_TIM_IRQHandler(&htim3);
/* USER CODE BEGIN TIM3_IRQn 1 */
/* USER CODE END TIM3_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles TIM5 global interrupt.
*/
void TIM5_IRQHandler(void)
{
/* USER CODE BEGIN TIM5_IRQn 0 */
/* USER CODE END TIM5_IRQn 0 */
HAL_TIM_IRQHandler(&htim5);
/* USER CODE BEGIN TIM5_IRQn 1 */
/* USER CODE END TIM5_IRQn 1 */
}
/**
* @brief This function handles TIM6 global interrupt, DAC1_CH1 and DAC1_CH2 underrun error interrupts.
*/
void TIM6_DAC_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_DAC_IRQn 0 */
/* USER CODE END TIM6_DAC_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_DAC_IRQn 1 */
/* USER CODE END TIM6_DAC_IRQn 1 */
}
/* USER CODE BEGIN 1 */
#if USE_UART_RX_IT
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
// 计算下一个写入位置
uint16_t next_head = (rx_buffer.head + 1) % BUFFER_SIZE;
// 仅当缓冲区未满时存储数据
if (next_head != rx_buffer.tail)
{
rx_buffer.data[rx_buffer.head] = received_byte;
rx_buffer.head = next_head;
}
// 重新启用接收中断
HAL_UART_Receive_IT(&huart1, &received_byte, 1);
}
}
#endif
/* USER CODE END 1 */
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "tim.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
uint32_t now_cnt = 0;
uint32_t last_cnt = 0;
uint8_t key_value = 0;
uint8_t i = 0;
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
/* USER CODE BEGIN 2 */
bsp_init();
printf("GTIM Pluse Test\r\n");
MX_TIM2_Init();
tim2_restart_count(); // 重启计数器
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
key_value = key_scan(0);
if(key_value == KEY0_PRES)
{
tim2_restart_count(); // 重启计数器
printf("TIM2 Count Restart\r\n");
}
now_cnt = tim2_get_count();
if(now_cnt != last_cnt)
{
last_cnt = now_cnt;
printf("TIM2 Count: %lu\r\n", now_cnt);
}
i++;
if(i >= 20)
{
i = 0;
HAL_GPIO_TogglePin(LED_RED_Port, LED_RED_Pin);
}
HAL_Delay(10);
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3. 基本定时器相关函数总结(HAL库)
3.1 初始化与配置
-
核心配置流程(四步关键操作):
- 使能时钟(TIM2/3/4/5挂载不同总线)
- 配置GPIO复用功能
- 初始化定时器参数
- 配置NVIC中断
-
HAL_TIM_Base_Init(TIM_HandleTypeDef *htim)
基础配置示例(TIM2作为基本定时器):
// 1. 使能时钟 (TIM2挂载APB1L)
__HAL_RCC_TIM2_CLK_ENABLE();
// 2. 配置定时器参数
htim2.Instance = TIM2;
htim2.Init.Prescaler = 8399; // 84MHz/(8399+1)=10kHz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 9999; // 10kHz/10000=1Hz (1秒)
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
// 3. 初始化定时器
HAL_TIM_Base_Init(&htim2);
-
TIM_OC_InitTypeDefPWM配置:成员 说明 典型值 H750特殊说明 OCMode输出模式 TIM_OCMODE_PWM1支持6种PWM模式 Pulse比较值 0-65535 决定占空比 OCPolarity输出极性 TIM_OCPOLARITY_HIGH低电平有效时选LOW OCNPolarity互补极性 N/A(通用定时器无互补) 仅高级定时器支持 OCFastMode快速模式 TIM_OCFAST_DISABLE适用于特殊场景 -
时钟源与频率计算(核心!):
定时周期 = ((Prescaler+1) × (Period+1)) / TIMx_CLK
PWM频率 = TIMx_CLK / ((Prescaler+1) × (Period+1))
占空比(%) = (Pulse / (Period+1)) × 100
H750时钟树特点:
| 定时器 | 挂载总线 | 最大时钟 | 时钟计算公式 |
|---|---|---|---|
| TIM2 | APB1L | 84MHz | TIMx_CLK = APB1_CLK × (APB1_PRESC≠1 ? 2 : 1) |
| TIM3 | APB1L | 84MHz | 同上 |
| TIM4 | APB1L | 84MHz | 同上 |
| TIM5 | APB1L | 84MHz | 同上 |
✅ 验证方法:
uint32_t tim_clk = HAL_RCC_GetPCLK1Freq();
if (READ_BIT(RCC->D2PPRE1, RCC_D2PPRE1_D2PPRE1) != 0) {
tim_clk *= 2; // APB预分频≠1时自动×2
}
3.2 定时器操作核心函数
-
基础启停控制:
函数 原型 特点 应用场景 HAL_TIM_Base_Start()(htim)启动计数 通用定时 HAL_TIM_Base_Start_IT()(htim)启动+更新中断 周期任务 HAL_TIM_Base_Start_DMA()(htim, Src, Length)启动+DMA 波形生成 HAL_TIM_Base_Stop()(htim)停止计数 暂停定时 HAL_TIM_Base_Stop_IT()(htim)停止+中断 -
PWM输出控制:
// 1. 启动PWM通道
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
// 2. 动态修改占空比(50% → 75%)
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, 15000); // Period=20000
// 3. 停止PWM输出
HAL_TIM_PWM_Stop(&htim3, TIM_CHANNEL_1);
- 输入捕获控制:
// 1. 启动输入捕获
HAL_TIM_IC_Start(&htim4, TIM_CHANNEL_2);
// 2. 获取捕获值
uint32_t pulse = HAL_TIM_ReadCapturedValue(&htim4, TIM_CHANNEL_2);
// 3. 计算频率(假设Period=65535)
float freq = tim_clk / ((pulse_high - pulse_low) * (Prescaler+1));
- 计数器操作:
__HAL_TIM_SET_COUNTER(&htim2, 0); // 设置当前计数值
uint32_t cnt = __HAL_TIM_GET_COUNTER(&htim2); // 读取计数值
__HAL_TIM_SET_AUTORELOAD(&htim2, 4999); // 动态修改周期
3.3 中断处理机制
-
中断类型与标志位:
中断类型 标志位宏 触发条件 回调函数 更新中断 TIM_FLAG_UPDATE计数器溢出/初始化 HAL_TIM_PeriodElapsedCallback()捕获中断 TIM_FLAG_CC1通道1捕获事件 HAL_TIM_IC_CaptureCallback()比较中断 TIM_FLAG_CC1通道1比较匹配 HAL_TIM_OC_DelayElapsedCallback()触发中断 TIM_FLAG_TRIG从模式触发 HAL_TIM_TriggerCallback() -
中断服务函数:
void TIM2_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim2); // 通用处理函数
}
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim3);
}
- 中断回调机制:
// 更新中断回调
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2) {
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5); // 1秒翻转LED
}
}
// 输入捕获回调
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_1) {
uint32_t rising = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
// 计算脉冲宽度...
}
}
- 中断优先级配置:
HAL_NVIC_SetPriority(TIM2_IRQn, 1, 0); // 抢占优先级1
HAL_NVIC_EnableIRQ(TIM2_IRQn); // 使能中断
3.4 高级功能与特性
- 编码器接口模式:
// 配置TIM3为编码器模式(CH1=TIM3_CH1, CH2=TIM3_CH2)
htim3.Instance = TIM3;
htim3.Init.Prescaler = 0;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 0xFFFF; // 16位计数器
htim3.EncoderMode = TIM_ENCODERMODE_TI12; // 两相计数
HAL_TIM_Encoder_Init(&htim3, &sEncoderConfig);
// 读取当前编码器位置
int16_t position = __HAL_TIM_GET_COUNTER(&htim3);
✅ H750优势:支持四倍频(TIM_ENCODERMODE_TI12)
-
从模式控制(复杂时序同步):
从模式 配置方式 应用场景 门控模式 SMS=010外部信号控制计数 触发模式 SMS=011同步启动其他定时器 外部时钟1 SMS=111外部信号作为时钟
// 配置TIM4作为TIM2的从机(触发模式)
TIM4->SMCR |= TIM_SMCR_SMS_0 | TIM_SMCR_SMS_1; // 触发模式
TIM4->SMCR |= TIM_SMCR_TS_2; // 触发源:ITR1 (TIM2)
HAL_TIM_Base_Start(&htim4); // TIM4将由TIM2触发
- DMA触发控制:
// 配置更新事件触发DMA
__HAL_TIM_ENABLE_DMA(&htim2, TIM_DMA_UPDATE);
// 配置比较匹配触发DMA
__HAL_TIM_ENABLE_DMA(&htim3, TIM_DMA_CC1);
// 启动DMA传输
HAL_TIM_Base_Start_DMA(&htim2, TIM_DMA_UPDATE,
(uint32_t*)buffer, BUFFER_SIZE);
- 单脉冲模式(OPM):
// 配置TIM5为单脉冲模式
htim5.Instance = TIM5;
htim5.Init.CounterMode = TIM_COUNTERMODE_UP;
htim5.Init.Period = 1000;
HAL_TIM_OnePulse_Init(&htim5, TIM_OPMODE_SINGLE);
// 启动单脉冲输出
HAL_TIM_OnePulse_Start(&htim5, TIM_CHANNEL_1);
// 自动停止(计数器到达Period后)
3.5 使用示例(完整流程)
3.5.1 示例1:TIM3输出PWM控制LED亮度
TIM_HandleTypeDef htim3 = {0};
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 1. 使能时钟
__HAL_RCC_TIM3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE(); // TIM3_CH2 = PB5
// 2. 配置GPIO (复用推挽)
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 3. 配置TIM3参数 (1kHz PWM, 50%初始占空比)
htim3.Instance = TIM3;
htim3.Init.Prescaler = 8399; // 84MHz/8400=10kHz
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 9999; // 10kHz/10000=1kHz
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim3);
// 4. 配置PWM通道
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 5000; // 50%占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2);
// 5. 启动PWM输出
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
// 6. 动态调整亮度(主循环中)
while(1) {
for(uint16_t i=0; i<=10000; i+=100) {
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, i);
HAL_Delay(10);
}
}
3.5.2 示例2:TIM4输入捕获测量脉冲频率
TIM_HandleTypeDef htim3 = {0};
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 1. 使能时钟
__HAL_RCC_TIM3_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE(); // TIM3_CH2 = PB5
// 2. 配置GPIO (复用推挽)
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF2_TIM3;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 3. 配置TIM3参数 (1kHz PWM, 50%初始占空比)
htim3.Instance = TIM3;
htim3.Init.Prescaler = 8399; // 84MHz/8400=10kHz
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 9999; // 10kHz/10000=1kHz
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim3);
// 4. 配置PWM通道
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 5000; // 50%占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_2);
// 5. 启动PWM输出
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
// 6. 动态调整亮度(主循环中)
while(1) {
for(uint16_t i=0; i<=10000; i+=100) {
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, i);
HAL_Delay(10);
}
}
4. 关键注意事项
- 时钟树陷阱:
-
H750特殊性:
-
APB1分频器设置会影响定时器时钟:
// 实际时钟 = APB1_CLK × (D2PPRE1≠1 ? 2 : 1) uint32_t apb1_clk = HAL_RCC_GetPCLK1Freq(); uint32_t tim_clk = (RCC->D2PPRE1 & 0x07) ? apb1_clk * 2 : apb1_clk; -
错误配置:在CubeMX中未勾选"TIMxCLK = 2×APBx" → 实际频率翻倍
-
- PWM占空比精度:
-
分辨率公式:
Resolution = 1 / (Period + 1) -
H750优化方案:
需求 Period值 分辨率 适用场景 8位精度 255 0.39% LED调光 10位精度 1023 0.098% 电机控制 12位精度 4095 0.024% 精密电源
- 输入捕获抖动问题:
-
硬件滤波:配置
ICFilter(0-15可选)sConfigIC.ICFilter = 0x07; // 8个时钟周期滤波 -
软件滤波:
// 丢弃异常值(示例:10%波动范围) if(abs(new_width - last_width) > (last_width * 0.1)) { return; // 无效数据 }
- 低功耗模式影响:
| 模式 | 行为 | 恢复操作 | H750注意事项 |
|---|---|---|---|
| SLEEP | 继续运行 | 无 | |
| STOP0 | 暂停计数 | 重置计数器+重启 | 需冻结定时器:__HAL_DBGMCU_FREEZE_TIMx() |
| STOP1/2 | 停止计数 | 重新配置时钟 | 无法用于唤醒 |
| STANDBY | 关闭 | 完全重新初始化 |
- 多定时器同步陷阱:
-
主从配置顺序:必须先启动主定时器
-
错误示例:
HAL_TIM_Base_Start(&htim4); // 从机先启动 HAL_TIM_Base_Start(&htim2); // 主机后启动 → 同步失败 -
正确做法:
HAL_TIM_Base_Start(&htim2); // 先启动主 HAL_TIM_Base_Start(&htim4); // 再启动从
4.1 H750特有优化技巧
| 场景 | 解决方案 | 性能提升 | 实现要点 |
|---|---|---|---|
| 高精度PWM | TIMx + DMA动态更新ARR | 分辨率↑10倍 | HAL_TIMEx_DMAxx_Start(&htim, TIM_DMA_UPDATE, arr_buf, size) |
| 多通道同步 | 主定时器触发从定时器 | 相位误差<50ns | `TIMx->SMCR |
| STOP模式滴答 | STOP0 + LSE时钟 | 功耗↓90% | 切换TIM2时钟源至LSE (32.768kHz) |
| 编码器零点校准 | ETR引脚触发复位 | 位置精度=1计数 | `TIMx->SMCR |
避坑指南:
- 自动重载预装载陷阱:
TIM_AUTORELOAD_PRELOAD_ENABLE时修改ARR:__HAL_TIM_SET_AUTORELOAD(&htim3, 20000); // 不会立即生效 __HAL_TIM_GENERATE_EVENT(&htim3, TIM_EVENTSOURCE_UPDATE); // 强制更新
- GPIO复用冲突:
- TIM3_CH1可接PA6/PB4/PC6,必须确认AF编号
- H750部分引脚AF编号与F4系列不同(查Table 12)
- 中断优先级倒置:
- PWM中断优先级 必须高于 任务调度器
- 推荐:抢占优先级=1,子优先级=0
- 编码器方向判断:
// 读取编码器方向 if (__HAL_TIM_IS_TIM_COUNTING_DOWN(&htim3)) { direction = -1; // 逆时针 } else { direction = 1; // 顺时针 }
4.2 通用定时器功能对比表
┌───────────────┬───────────┬───────────┬───────────┬───────────┐
│ 功能 │ TIM2 │ TIM3 │ TIM4 │ TIM5 │
├───────────────┼───────────┼───────────┼───────────┼───────────┤
│ 位宽 │ 32位 │ 16位 │ 16位 │ 32位 │
│ 通道数 │ 4 │ 4 │ 4 │ 4 │
│ 最大频率 │ 84MHz │ 84MHz │ 84MHz │ 84MHz │
│ 编码器支持 │ 支持 │ 支持 │ 支持 │ 支持 │
│ DMA支持 │ 7请求 │ 7请求 │ 7请求 │ 7请求 │
│ 特殊功能 │ 32位计数 │ - │ - │ 32位计数 │
│ │ 外部时钟2 │ │ │ 外部时钟2 │
└───────────────┴───────────┴───────────┴───────────┴───────────┘
重要提示:
- TIM2/TIM5:32位计数器,适合长周期定时或高精度测量
- TIM3/TIM4:16位计数器,资源更节省,适合常规PWM控制
- 编码器接口仅支持CH1/CH2,需配置为输入模式
- 通用定时器无互补输出,复杂电机控制需用高级定时器


 浙公网安备 33010602011771号
浙公网安备 33010602011771号