
第3章 USART介绍及使用
第三章 USART介绍及应用
1. USART简介
USART(Universal Synchronous Asynchronous Receiver Transmitter)是 STM32H750VBT6 的核心串行通信外设,支持同步(Synchronous)和异步(Asynchronous)两种通信模式,广泛应用于调试输出、传感器数据采集、设备间通信(如 GPS、蓝牙模块)等场景。STM32H750VBT6 集成了 4 个全功能 USART(USART1-3, USART6)和 4 个 UART(UART4-5, UART7-8),其中 USART 支持同步时钟信号,功能更强大。
🔍 关键区别:
- USART = 通用同步异步收发器(含同步时钟引脚
SCLK)- UART = 通用异步收发器(仅支持异步通信)
STM32H750VBT6 的 USART1/2/3/6 支持同步模式,其余为纯 UART
1.1 USART 核心特性(基于 STM32H750VBT6)
| 特性 | 参数 | 说明 | 应用场景 |
|---|---|---|---|
| 通信模式 | 异步/同步 | 异步:无时钟线(TX/RX);同步:需 SCLK 时钟线 |
异步:调试串口;同步:高速数据传输(如与 FPGA 通信) |
| 波特率范围 | 1200 bps – 10.5 Mbps | 依赖时钟源(最高 10.5Mbps @ 200MHz APB1 时钟) | 高速传感器(如 IMU 数据流) |
| 数据格式 | 7/8/9 位数据 + 0.5/1/1.5/2 停止位 | 可配置校验位(偶/奇校验) | 兼容老式设备(如 9 位协议) |
| 多处理器通信 | IDLE 检测 + 地址匹配 | 支持 4 位/7 位/10 位地址过滤 | 工业总线(如 Modbus RTU) |
| 高级功能 | LIN 主/从模式、智能卡模式、IrDA 红外 | 内置 16x 过采样 + 噪声抑制滤波器 | 汽车电子(LIN 总线)、医疗设备 |
| 中断/DMA | 10+ 种中断源 + 双缓冲 DMA | 可触发发送/接收完成、帧错误、空闲中断 | 高效数据传输(避免 CPU 轮询) |
📌 STM32H750VBT6 专属优势:
- 双时钟域支持:USART1/6 位于 APB2(最高 200MHz),USART2/3 位于 APB1(最高 100MHz)
- 低功耗模式:支持 Stop 0/1 模式下的唤醒(通过空闲中断或地址匹配)
- 硬件流控制:
CTS(清发送)/RTS(请求发送)引脚自动控制数据流(防溢出)
1.2 工作原理详解
1.2.1 异步通信模式(最常用)
🔹 帧结构:
[起始位] | [数据位 8] | [校验位] | [停止位 1]
0 | LSB→MSB | 可选 | 1/0.5/1.5/2
- 起始位:固定低电平(1 bit)
- 数据位:7/8/9 bit(可配置 LSB/MSB 优先)
- 校验位:偶校验/奇校验(提高可靠性)
- 停止位:高电平(1/0.5/1.5/2 bit)
🔹 波特率生成:
-
公式:
Baud = f_clk / (8 * (2 - OVER8) * USARTDIV)OVER8=0:16 倍过采样(精度高)OVER8=1:8 倍过采样(速度更快)
-
关键寄存器:
USART_BRR(波特率寄存器)// 例如:115200bps @ 100MHz APB1 时钟 (OVER8=0) USARTDIV = 100000000 / (16 * 115200) = 54.253 → 整数部分=54, 小数部分=0.253*16≈4 BRR = (54 << 4) | 4 = 0x364; // 写入寄存器
⚠️ 波特率误差:
- STM32H7 要求误差 < ±2%(否则通信失败)
- 解决方案:
- 选择合适时钟源(如 HSE 25MHz 比 HSI 64MHz 更精确)
- 启用
OVER8=1(8 倍过采样)减小误差
1.2.2 同步通信模式
🔹 时钟信号:
- 通过
SCLK引脚输出同步时钟(上升沿采样) - 时钟极性/相位可配置(类似 SPI):
CPOL=0:空闲时钟低电平CPHA=0:第一个时钟边沿捕获数据
🔹 优势:
- 无波特率误差问题(时钟同步)
- 最高支持 10.5 Mbps(异步模式仅 5.25 Mbps)
- 适合长距离/噪声环境通信
1.3 关键寄存器操作
1.3.1 核心配置寄存器
| 寄存器 | 关键位域 | 功能 | 配置示例 |
|---|---|---|---|
| CR1 | UE, M, PCE, PS, TE, RE | 使能外设、数据长度、校验、发送/接收 | USART1->CR1 = (1<<3) \| (1<<2) \| (1<<13); // 使能 TX/RX + 外设 |
| CR2 | STOP, CLKEN, LBDL | 停止位、同步时钟使能、LIN 检测 | USART1->CR2 = (0b11<<12); // 2 停止位 |
| CR3 | CTSE, RTSE, DMAT, DMAR | 硬件流控制、DMA 使能 | USART1->CR3 = (1<<9) \| (1<<8); // 使能 RTS/CTS |
| BRR | DIV_Mantissa, DIV_Fraction | 波特率分频值 | USART1->BRR = 0x364; // 115200bps |
| SR | TXE, RXNE, ORE, IDLE | 状态标志(发送空、接收非空、溢出、空闲) | while (!(USART1->SR & (1<<6))); // 等待发送完成 |
| DR | DR[8:0] | 数据寄存器(读写) | USART1->DR = 'A'; // 发送字符 |
1.3.2 中断/DMA 关键配置
| 功能 | 寄存器位 | 说明 | 实战要点 |
|---|---|---|---|
| 接收中断 | CR1.RXNEIE=1 |
数据寄存器非空时触发 | 必须立即读 DR(否则标志不自动清零) |
| 发送中断 | CR1.TXEIE=1 |
发送寄存器为空时触发 | 适合发送不定长数据(如字符串) |
| 空闲中断 | CR1.IDLEIE=1 |
线路空闲时触发 | DMA 接收不定长数据的黄金方案(结合 SR.IDLE) |
| DMA 请求 | CR3.DMAT=1CR3.DMAR=1 |
使能发送/接收 DMA | 配置 DMA 通道(USART1_RX 通常在 DMA1 Stream5) |
✅ 空闲中断 + DMA 接收流程:
- 使能
CR1.IDLEIE和CR3.DMAR - DMA 接收数据到缓冲区
- 空闲线检测触发中断 → 读取
SR.IDLE - 通过
DMA_SxNDTR计算已接收数据长度 - 关键操作:先写
SR.IDLE再读DR清除标志
1.4 USART vs UART vs SPI vs I2C 对比表
| 特性 | USART | UART | SPI | I2C |
|---|---|---|---|---|
| 时钟线 | 有 (同步模式) | 无 | 有 (SCLK) | 有 (SCL) |
| 最大速率 | 10.5 Mbps | 5.25 Mbps | 50+ Mbps | 1-5 Mbps |
| 引脚数 | 2-4 (TX/RX/CK/CTS/RTS) | 2 (TX/RX) | 2-4 | 2 |
| 多设备支持 | 地址匹配 | 无 | 片选线 | 7/10 位地址 |
| 典型用途 | 调试、传感器 | 低成本通信 | 高速外设 | 低速外设 |
💡 选择建议:
- 调试输出 → USART(异步模式)
- 连接 GPS/蓝牙 → UART(无同步需求)
- 高速 ADC 传输 → USART(同步模式)
- 避免 I2C 总线拥塞 → USART + 地址匹配(多设备通信)
2. USART使用示例-STM32IDE
2.1 STM32Cube配置
2.1.1 RCC配置
只在第一章中展示,因为后续内容一样
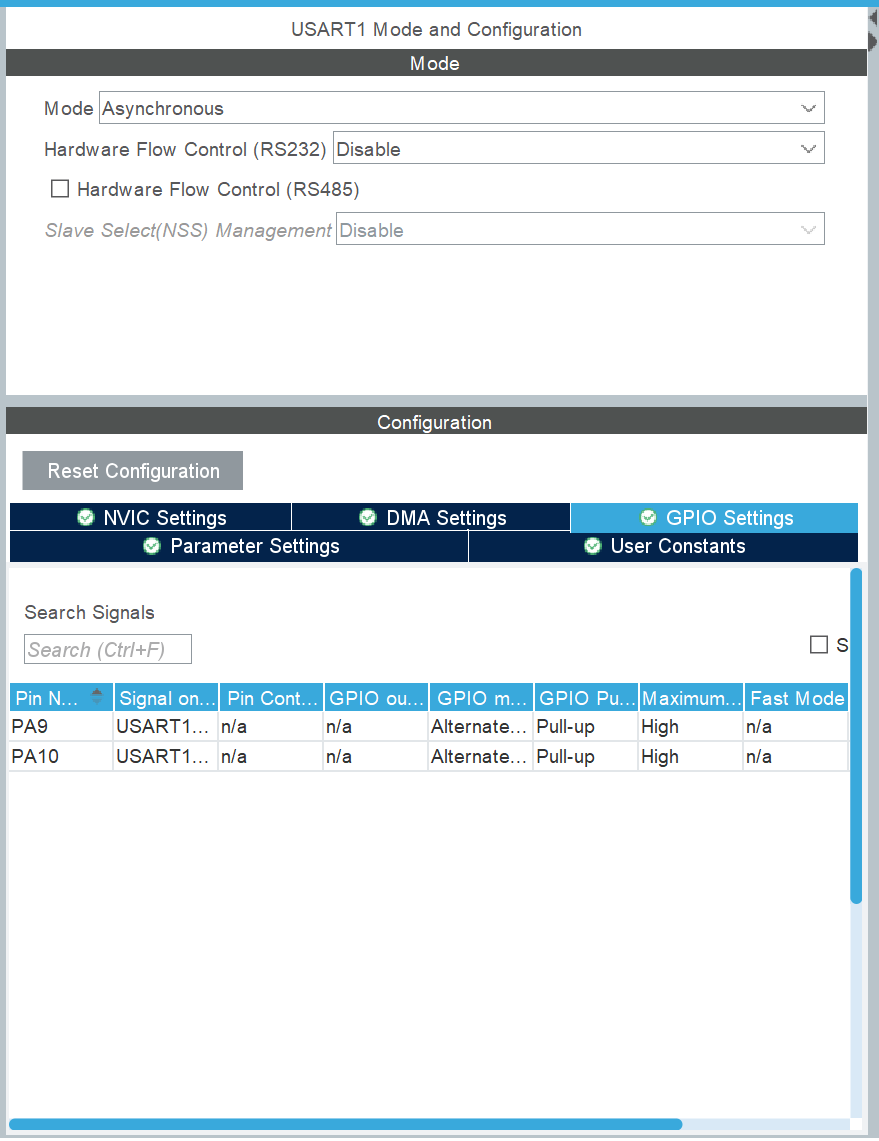
2.1.2 USART GPIO配置
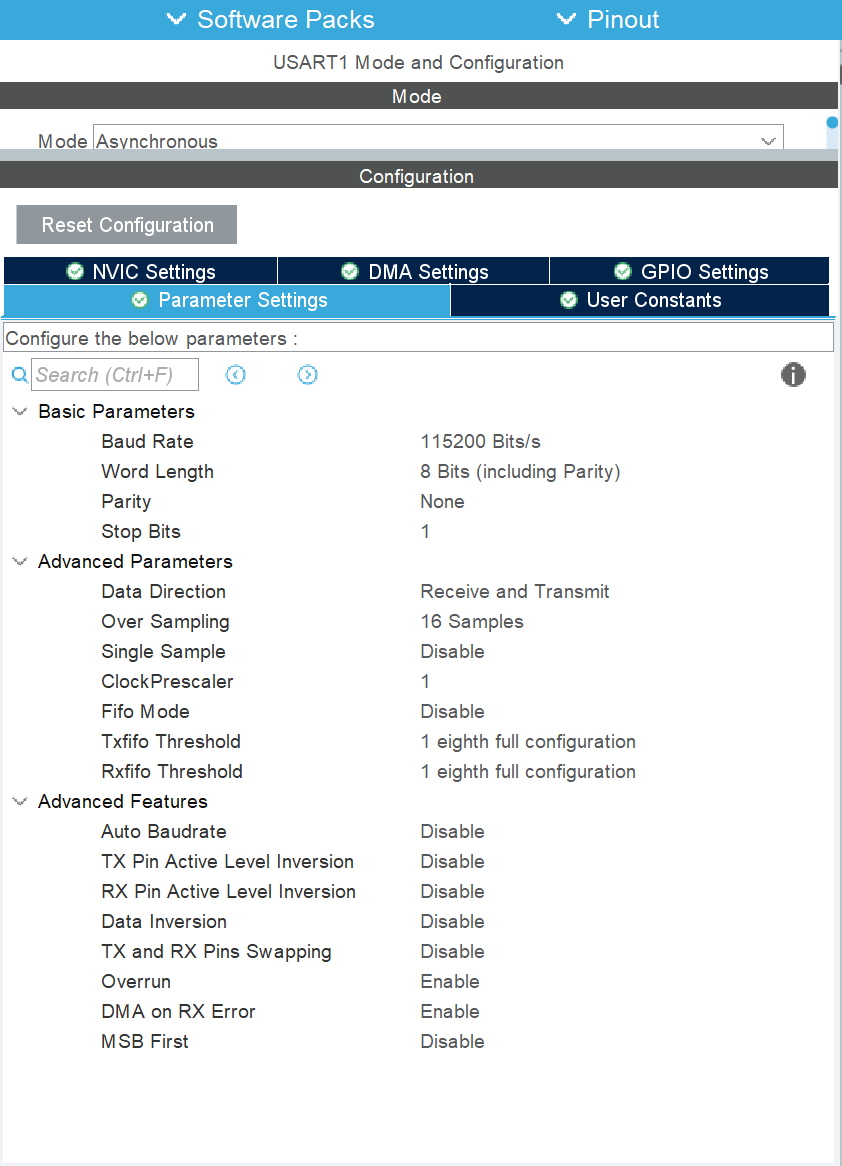
2.1.3 USART工作模式配置
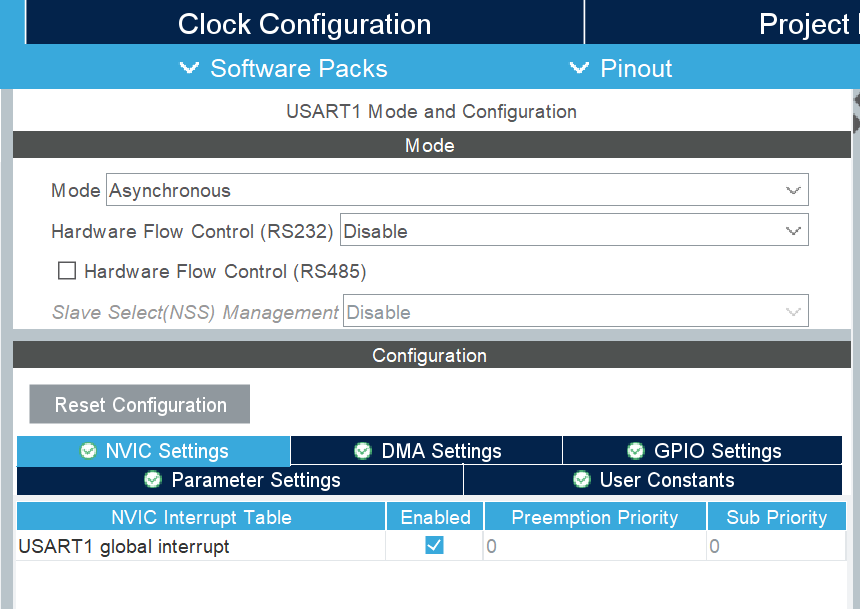
2.1.4 NVIC配置
2.2 用户代码
2.2.1 相关宏定义
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file usart.h
* @brief This file contains all the function prototypes for
* the usart.c file
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __USART_H__
#define __USART_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
extern UART_HandleTypeDef huart1;
/* USER CODE BEGIN Private defines */
// 环形缓冲区配置
#define BUFFER_SIZE 64
// 声明环形缓冲区结构
typedef struct {
uint8_t data[BUFFER_SIZE];
volatile uint16_t head; // 写指针
volatile uint16_t tail; // 读指针
} RingBuffer;
// 声明全局变量
extern RingBuffer rx_buffer;
extern uint8_t received_byte;
// 是否启用接收中断
#define USE_UART_RX_IT 0
/* USER CODE END Private defines */
void MX_USART1_UART_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __USART_H__ */
2.2.2 USART初始化配置
/**
******************************************************************************
* @file usart.c
* @brief This file provides code for the configuration
* of the USART instances.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "usart.h"
/* USER CODE BEGIN 0 */
#include "stdio.h"
/* USER CODE END 0 */
UART_HandleTypeDef huart1;
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/** Initializes the peripherals clock
*/
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInitStruct.Usart16ClockSelection = RCC_USART16CLKSOURCE_D2PCLK2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle)
{
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspDeInit 0 */
/* USER CODE END USART1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_USART1_CLK_DISABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10);
/* USART1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspDeInit 1 */
/* USER CODE END USART1_MspDeInit 1 */
}
}
2.2.3 printf重定向
/* USER CODE BEGIN 1 */
/******************************************************************************************/
/* 加入以下代码, 支持printf函数, 而不需要选择use MicroLIB */
#if 1
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
/* printf重定向 */
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
#endif
/* USER CODE END 1 */
2.2.4 接收中断函数
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32h7xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32h7xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "exti.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
// 定义全局变量
RingBuffer rx_buffer = { .head = 0, .tail = 0 };
uint8_t received_byte;
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Pre-fetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles System service call via SWI instruction.
*/
void SVC_Handler(void)
{
/* USER CODE BEGIN SVCall_IRQn 0 */
/* USER CODE END SVCall_IRQn 0 */
/* USER CODE BEGIN SVCall_IRQn 1 */
/* USER CODE END SVCall_IRQn 1 */
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/**
* @brief This function handles Pendable request for system service.
*/
void PendSV_Handler(void)
{
/* USER CODE BEGIN PendSV_IRQn 0 */
/* USER CODE END PendSV_IRQn 0 */
/* USER CODE BEGIN PendSV_IRQn 1 */
/* USER CODE END PendSV_IRQn 1 */
}
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
/******************************************************************************/
/* STM32H7xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32h7xx.s). */
/******************************************************************************/
/**
* @brief This function handles EXTI line1 interrupt.
*/
void EXTI1_IRQHandler(void)
{
/* USER CODE BEGIN EXTI1_IRQn 0 */
/* USER CODE END EXTI1_IRQn 0 */
//HAL_GPIO_EXTI_IRQHandler(EXTI_KEY1_Pin);
/* USER CODE BEGIN EXTI1_IRQn 1 */
//if(HAL_GPIO_ReadPin(EXTI_KEY1_GPIO_Port, EXTI_KEY1_Pin) == GPIO_PIN_RESET)
//{
// HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_4);
//}
/* USER CODE END EXTI1_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/* USER CODE BEGIN 1 */
#if USE_UART_RX_IT
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USART1)
{
// 计算下一个写入位置
uint16_t next_head = (rx_buffer.head + 1) % BUFFER_SIZE;
// 仅当缓冲区未满时存储数据
if (next_head != rx_buffer.tail)
{
rx_buffer.data[rx_buffer.head] = received_byte;
rx_buffer.head = next_head;
}
// 重新启用接收中断
HAL_UART_Receive_IT(&huart1, &received_byte, 1);
}
}
#endif
/* USER CODE END 1 */
2.2.5 主函数测试
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "bsp_init.h"
#include "stdio.h" // For printf function
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MPU_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
extern RingBuffer rx_buffer;
extern uint8_t received_byte;
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MPU Configuration--------------------------------------------------------*/
MPU_Config();
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
//MX_GPIO_Init();
//MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
bsp_init();
// 初始化缓冲区指针
rx_buffer.head = 0;
rx_buffer.tail = 0;
// 启动接收中断
HAL_UART_Receive_IT(&huart1, &received_byte, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
if(rx_buffer.head != rx_buffer.tail) // 检查缓冲区是否有数据
{
// 从缓冲区读取数据
uint8_t tx_byte = rx_buffer.data[rx_buffer.tail];
rx_buffer.tail = (rx_buffer.tail + 1) % BUFFER_SIZE;
// 发送数据
HAL_UART_Transmit(&huart1, &tx_byte, 1, HAL_MAX_DELAY);
}
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Supply configuration update enable
*/
HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);
while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 2;
RCC_OscInitStruct.PLL.PLLN = 240;
RCC_OscInitStruct.PLL.PLLP = 2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;
RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;
RCC_OscInitStruct.PLL.PLLFRACN = 0;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2
|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;
RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;
RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/* MPU Configuration */
void MPU_Config(void)
{
MPU_Region_InitTypeDef MPU_InitStruct = {0};
/* Disables the MPU */
HAL_MPU_Disable();
/** Initializes and configures the Region and the memory to be protected
*/
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.BaseAddress = 0x0;
MPU_InitStruct.Size = MPU_REGION_SIZE_4GB;
MPU_InitStruct.SubRegionDisable = 0x87;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.AccessPermission = MPU_REGION_NO_ACCESS;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_DISABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_SHAREABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/* Enables the MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3. USART/UART相关函数(HAL库)
3.1 初始化与配置
-
核心配置流程(四步关键操作):
- 使能时钟(区分APB1/APB2总线)
- 配置GPIO复用功能
- 初始化USART参数
- 配置NVIC中断
-
HAL_UART_Init(UART_HandleTypeDef *huart)
基础配置示例:// 1. 使能时钟 (USART1/6在APB2, 其他在APB1) __HAL_RCC_USART1_CLK_ENABLE(); // APB2最高160MHz __HAL_RCC_GPIOB_CLK_ENABLE(); // TX=PB6, RX=PB7 // 2. 配置GPIO (复用推挽输出 + 浮空输入) GPIO_InitTypeDef GPIO_InitStruct = {0}; GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // TX必须推挽 GPIO_InitStruct.Pull = GPIO_NOPULL; // RX可配置上拉 GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF7_USART1; // 查手册确认AF编号 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); // 3. 初始化USART huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; HAL_UART_Init(&huart1); -
UART_InitTypeDef关键成员:成员 说明 典型值 H750特殊说明 BaudRate通信波特率 9600/115200/921600 最高支持10.5Mbps WordLength数据位长度 UART_WORDLENGTH_8B支持7/8/9位 StopBits停止位数量 UART_STOPBITS_1UART_STOPBITS_0_5需校验Parity校验方式 UART_PARITY_NONEUART_PARITY_EVEN/ODDMode工作模式 UART_MODE_TX_RXUART_MODE_RX_ONLYHwFlowCtl硬件流控 UART_HWCONTROL_NONEUART_HWCONTROL_RTS_CTS -
波特率精度保障(H750关键):
// 计算实际波特率误差(CubeMX自动验证) float error = fabs(115200 - (float)APB_Clock / USARTDIV) / 115200; if(error > 0.02) { /* 误差>2%需调整时钟配置 */ }✅ H750优化方案:
- 使用16倍过采样(
OVER8=0)提高精度 - 高波特率时优先选择APB2总线(160MHz)
- 使用16倍过采样(
3.2 数据收发操作
-
基础收发模式:
函数 原型 特点 适用场景 HAL_UART_Transmit()(huart, *pData, Size, Timeout)阻塞式发送 简单调试信息 HAL_UART_Receive()(huart, *pData, Size, Timeout)阻塞式接收 固定长度协议 HAL_UART_Transmit_IT()(huart, *pData, Size)中断发送 中小数据量 HAL_UART_Receive_IT()(huart, *pData, Size)中断接收 定长数据包 HAL_UART_Transmit_DMA()(huart, *pData, Size)DMA发送 大数据量 HAL_UARTEx_ReceiveToIdle_DMA()(huart, *pData, Size)DMA+空闲中断 不定长数据 -
中断回调机制:
// 发送完成回调 void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance == USART1) { tx_complete = 1; // 设置完成标志 } } // 接收完成回调(DMA空闲中断特有) void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size) { if(huart->Instance == USART2) { memcpy(rx_buffer, dma_rx_buffer, Size); // 复制有效数据 HAL_UARTEx_ReceiveToIdle_DMA(huart, dma_rx_buffer, RX_BUFFER_SIZE); // 重启接收 } } -
DMA接收关键配置:
// 1. 启用空闲中断 __HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE); // 2. 配置DMA循环模式 hdma_rx.Instance = DMA1_Stream0; hdma_rx.Init.Mode = DMA_CIRCULAR; // 必须循环模式 HAL_DMA_Init(&hdma_rx); // 3. 启动接收(H750特有) HAL_UARTEx_ReceiveToIdle_DMA(&huart2, dma_rx_buffer, RX_BUFFER_SIZE);
3.3 高级功能
-
LIN总线模式:
// 启用LIN模式(USART2支持) huart2.Instance->CR2 |= USART_CR2_LINEN; // 发送Break帧(11位低电平) HAL_LIN_SendBreak(&huart2); // 配置LIN同步中断 HAL_UART_RegisterCallback(&huart2, HAL_UART_RXEVENT_CB_ID, LIN_SyncCallback); -
单线半双工模式:
huart1.Instance->CR3 |= USART_CR3_HDSEL; // 启用半双工 GPIO_InitStruct.Pin = GPIO_PIN_6; // 共用TX/RX引脚 GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 开漏输出 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); -
时钟同步模式(同步通信):
huart3.Instance->CR2 |= USART_CR2_CLKEN; // 启用时钟输出 huart3.Instance->CR2 |= USART_CR2_LBCL; // 最后位时钟脉冲 GPIO_InitStruct.Alternate = GPIO_AF7_USART3; GPIO_InitStruct.Pin = GPIO_PIN_10 | GPIO_PIN_12; // CK引脚 HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); -
错误处理机制:
错误类型 标志位 清除方式 回调函数 溢出错误 UART_FLAG_ORE__HAL_UART_CLEAR_OREFLAG()HAL_UART_ErrorCallback()帧错误 UART_FLAG_FE__HAL_UART_CLEAR_FEFAG()同上 噪声错误 UART_FLAG_NE__HAL_UART_CLEAR_NEFLAG()同上 硬件流控错误 UART_FLAG_LBD__HAL_UART_CLEAR_LBDFLAG()同上
3.4 使用示例(DMA空闲中断接收)
#define RX_BUFFER_SIZE 256
uint8_t dma_rx_buffer[RX_BUFFER_SIZE];
uint8_t app_rx_buffer[128];
// 1. 初始化USART2 (APB1最高80MHz)
__HAL_RCC_USART2_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
// 2. 配置PA2(TX)/PA3(RX)
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_2 | GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 3. USART2参数配置
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
HAL_UART_Init(&huart2);
// 4. 配置DMA (USART2_RX = DMA1_Stream0)
__HAL_RCC_DMA1_CLK_ENABLE();
hdma_rx.Instance = DMA1_Stream0;
hdma_rx.Init.Request = DMA_REQUEST_USART2_RX;
hdma_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_rx.Init.Mode = DMA_CIRCULAR; // 关键:循环模式
hdma_rx.Init.Priority = DMA_PRIORITY_HIGH;
HAL_DMA_Init(&hdma_rx);
__HAL_LINKDMA(&huart2, hdmarx, hdma_rx);
// 5. 启动DMA空闲中断接收
__HAL_UART_ENABLE_IT(&huart2, UART_IT_IDLE);
HAL_UARTEx_ReceiveToIdle_DMA(&huart2, dma_rx_buffer, RX_BUFFER_SIZE);
// 6. 数据处理回调
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart->Instance == USART2 && Size <= sizeof(app_rx_buffer))
{
memcpy(app_rx_buffer, dma_rx_buffer, Size); // 复制有效数据
process_data(app_rx_buffer, Size); // 应用层处理
}
// 重启DMA接收(关键步骤)
HAL_UARTEx_ReceiveToIdle_DMA(huart, dma_rx_buffer, RX_BUFFER_SIZE);
}
4. 关键注意事项
- 引脚复用冲突:
- USART1 TX可接PA9/PB6,必须确认AF编号(H750部分引脚AF编号不同)
- 避坑:PB7不能用于USART1_RX(仅支持USART3_RX)
- 波特率精度陷阱:
- H750主频480MHz → APB1=80MHz → USARTDIV=80e6/(16×115200)=43.4
- 实际值43 → 误差1.1% ✅
- APB1=100MHz时误差达4.5% ❌ → 必须使用CubeMX验证
- DMA接收死锁预防:
-
永远不要在回调中调用
HAL_UART_Receive_DMA() -
正确做法:
void HAL_UARTEx_RxEventCallback(...) { // 处理数据后立即重启接收 HAL_UARTEx_ReceiveToIdle_DMA(huart, buffer, size); }
- 低功耗设计要点:
| 模式 | 操作 | H750特殊要求 |
|---|---|---|
| STOP0 | HAL_UART_DeInit() |
需保持VOS=0 |
| STOP2 | 启用USART_CR1_UESM |
仅支持APB1外设 |
| STANDBY | 禁用所有时钟 | 无法保持通信 |
- 多实例冲突解决方案:
- 时分复用:使用
HAL_UART_DeInit()释放总线 - 优先级管理:高优先级通信使用APB2外设(USART1/6)
- 总线隔离:关键外设使用独立DMA通道
4.1 H750特有优化技巧
| 功能 | 实现方式 | 性能提升 | 典型场景 |
|---|---|---|---|
| DMA双缓冲 | HAL_UARTEx_ReceiveToIdle_DMA() + DMA_CIRCULAR |
0丢包接收 | 高速数据采集 |
| 16倍过采样 | huart->Init.OverSampling = UART_OVERSAMPLING_16 |
波特率误差↓ | 921600bps通信 |
| 时钟补偿 | 配置USART_CR1_M1=0 + USART_CR1_M0=0 |
避免9位数据错位 | Modbus RTU |
| 快速唤醒 | STOP2模式 + USART2唤醒 | 唤醒时间<3μs | 电池设备待机 |
避坑指南:
- H750时钟树特殊性:
- USART1/6挂载在D1域(最高160MHz)
- USART2/3/4/5/7/8挂载在D2域(最高80MHz)
- 错误配置会导致波特率严重偏差
- 空闲中断限制:
- 空闲中断触发需≥10位时间的低电平
- 高波特率时(如4Mbps)需确保数据间隔 > 2.5μs
- DMA传输陷阱:
- 传输长度必须为偶数(H750 DMA对齐要求)
- 使用
__HAL_DMA_ENABLE_IT(&hdma, DMA_IT_HT)实现半传输中断
4.2 USART工作模式对比图
┌─────────────┬───────────────┬───────────────┬─────────────────────┐
│ 模式 │ 数据长度 │ 中断触发点 │ H750适用场景 │
├─────────────┼───────────────┼───────────────┼─────────────────────┤
│ 标准中断接收 │ 固定长度 │ RXNE标志置位 │ Modbus ASCII │
│ │ (如10字节) │ │ │
├─────────────┼───────────────┼───────────────┼─────────────────────┤
│ 空闲中断 │ 不定长 │ 空闲线检测 │ GPS/NMEA协议 │
│ (推荐) │ (自动判断) │ │ 蓝牙透传模块 │
├─────────────┼───────────────┼───────────────┼─────────────────────┤
│ 事件模式 │ 无 │ 无CPU介入 │ 唤醒STOP2模式 │
│ │ │ │ 触发DMA传输 │
└─────────────┴───────────────┴───────────────┴─────────────────────┘


 浙公网安备 33010602011771号
浙公网安备 33010602011771号