
第6章 EPWM介绍及基础使用
第六章 EPWM介绍及基础使用
1. F28P550上的PWM
F28P550上的PWM叫ePWM,是一种增强型脉宽调制器, 一共有12个,每一个有两个通道,A通道和B通道。
ePWM具有两种工作模式,分别是基于时基Time Base的PWM模式,和比较器Compare的PWM模式。这两种工作模式都具有向上计数模式,向下计数模式,向上向下计数模式。
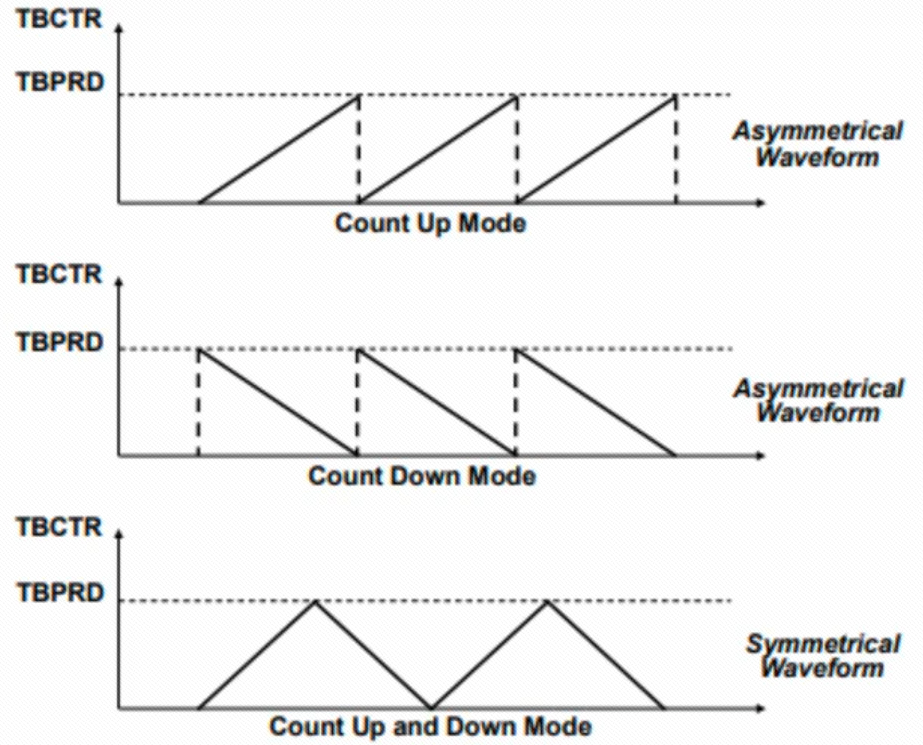
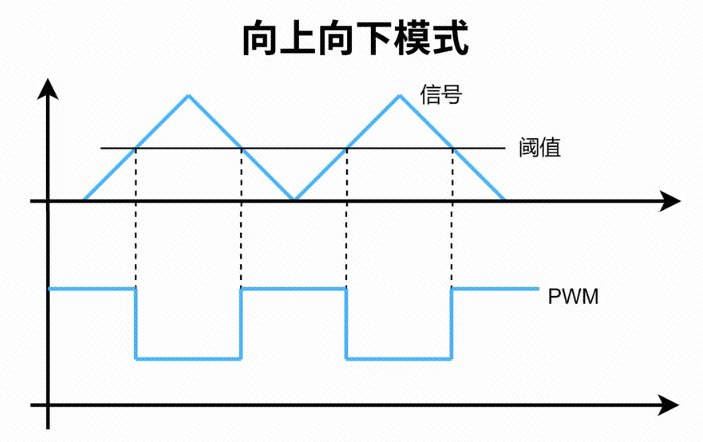
以向上向下计数模式为例,计数值一直向上加到最大,再从最大一直减到最小。计数变化的期间,如果计数值等于了设置的阈值(比较值),则输出的信号进行翻转。
这样向上计数的时候必定会遇到一次阈值,信号进行翻转;向下计数的时候也必定会遇到一次阈值,信号又进行一次翻转;最终实现的效果如下:
2. EPWM使用示例
2.1 CCS&syscfg配置
-
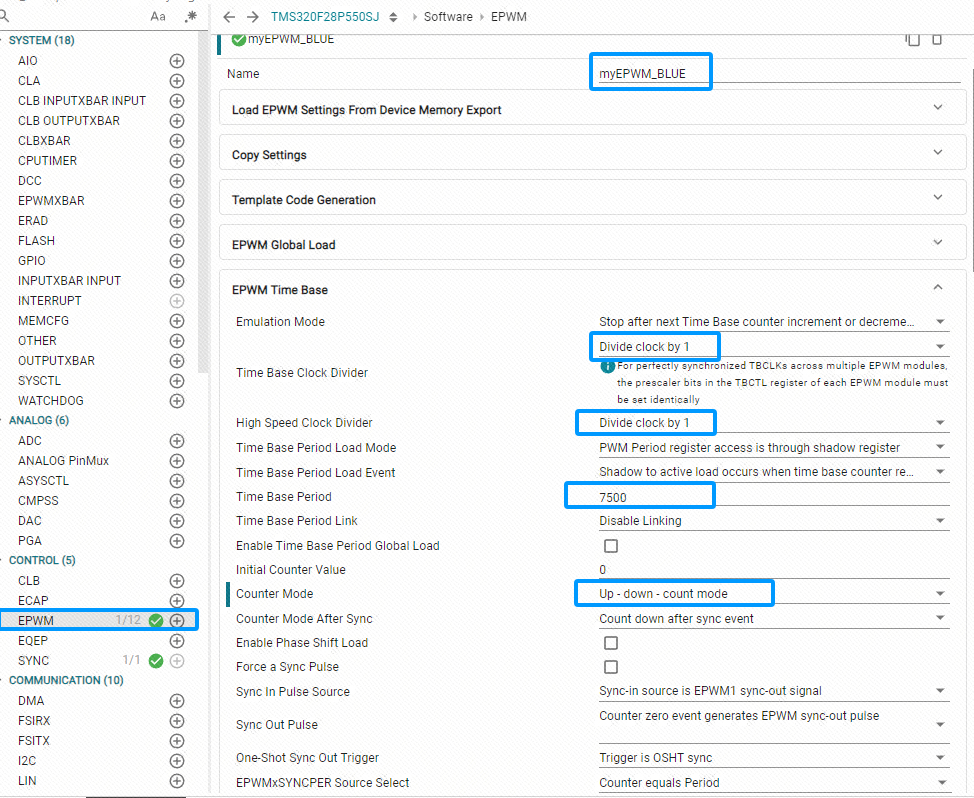
在 EPWM Time Base 中,设置时钟为默认的 1 分频,定时器周期 7500,使用向上向下计数模式;
-
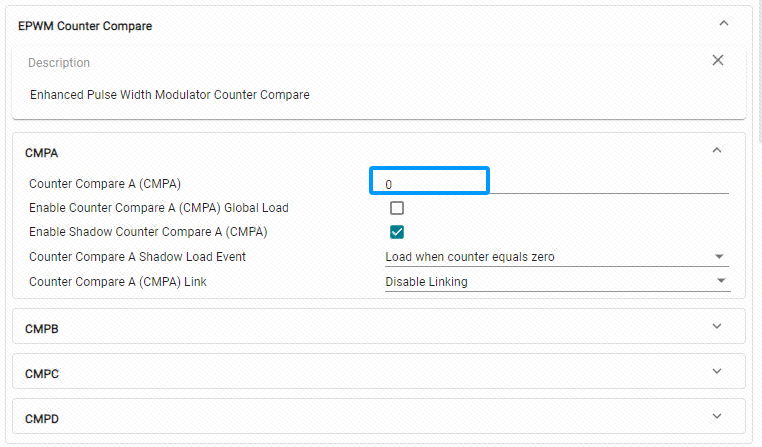
在 EPWM Counter Compare 中,在 CMPA 的下拉选项下,设置比较值(阈值)Counter Compare A (CMPA) 为0,即占空比为0%;
-
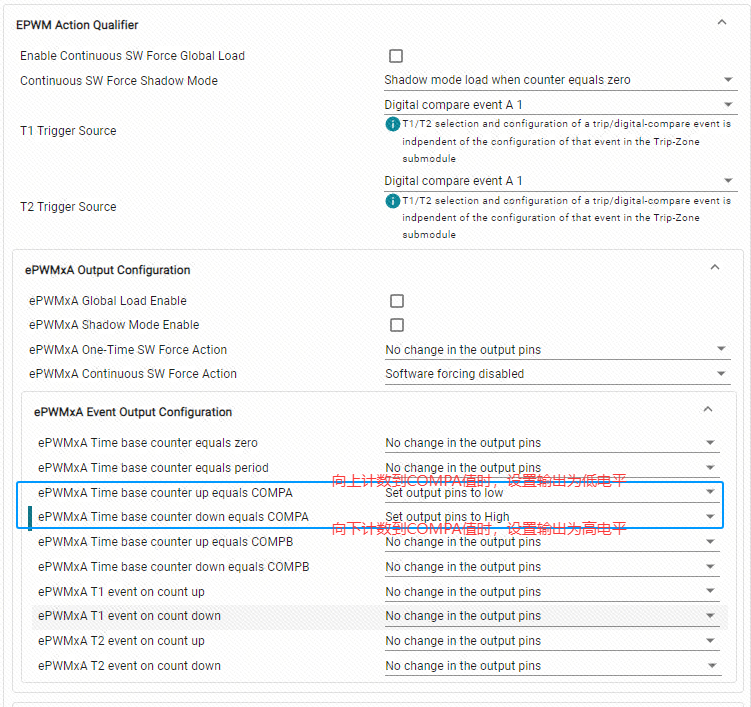
在 EPWM Action Qualifier 中,在 ePWMxA Event Output Configuration 的下拉选项下,设置向上计数到COMPA值时输出为高,向下计数到COMPA值时输出为高。
-
配置PWM到LED的引脚

关于输出频率和占空比的设置说明
ePWM时钟频率 EPWMCLK 来源为 SYSCLK,其默认为 150MHz。
CLKDIV 为 EPWM 定时器的时钟预分频;
HSPCLKDIV 为 EPWM 定时器的时钟二次预分频;
实际PWM的输出频率TBCLK = EPWMCLK / (HSPCLKDIV * CLKDIV)
定时器的周期值 = ePWM频率 / (2 * 希望输出频率)
希望输出频率 = ePWM频率 / (2 * 定时器的周期值)
COMPx 对比值 = (期望占空比 / 100) * 定时器的周期值
2.2 用户代码
//#############################################################################
//
// FILE: empty_driverlib_main.c
//
//! \addtogroup driver_example_list
//! <h1>Empty Project Example</h1>
//!
//! This example is an empty project setup for Driverlib development.
//!
//
//#############################################################################
//
//
//
// C2000Ware v5.05.00.00
//
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
#include "c2000ware_libraries.h"
/* PWM呼吸灯参数 */
#define STEP 10 // 占比比变化步长
uint16_t light_duty = 0; // PWM占空比
int8_t dir = 1; // 呼吸灯方向(1=正向, -1=反向)
void breathing_light(void)
{
light_duty += dir * STEP; // 改变PWM占空比
if(light_duty >= 7500)
{
light_duty = 7500;
dir = -1; // 呼吸灯方向反转
}
else if (light_duty <= 0)
{
light_duty = 0;
dir = 1; // 呼吸灯方向恢复
}
// 设置EPWM比较值
EPWM_setCounterCompareValue(User_EPWM_BASE, EPWM_COUNTER_COMPARE_A, light_duty);
}
//
// Main
//
void main(void)
{
//
// Initialize device clock and peripherals
//
Device_init();
//
// Disable pin locks and enable internal pull-ups.
//
Device_initGPIO();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// PinMux and Peripheral Initialization
//
Board_init();
//
// C2000Ware Library initialization
//
C2000Ware_libraries_init();
//
// Enable Global Interrupt (INTM) and real time interrupt (DBGM)
//
EINT;
ERTM;
while(1)
{
breathing_light(); // 呼吸灯变化
DEVICE_DELAY_US(1000);
}
}
//
// End of File
//
3. 相关函数介绍
//*****************************************************************************
//
//! 设置计数器比较值。
//!
//! \param base 是 EPWM 模块的基地址。
//! \param compModule 是计数器比较值模块。
//! \param compCount 是计数器比较计数值。
//!
//! 此函数用于设置计数器比较寄存器的比较值。
//! compCount 的最大值为 0xFFFF。
//! compModule 的有效值为:
//! - EPWM_COUNTER_COMPARE_A - 计数器比较 A。
//! - EPWM_COUNTER_COMPARE_B - 计数器比较 B。
//! - EPWM_COUNTER_COMPARE_C - 计数器比较 C。
//! - EPWM_COUNTER_COMPARE_D - 计数器比较 D。
//!
//! \return 无。
//
//*****************************************************************************
static inline void EPWM_setCounterCompareValue(uint32_t base, EPWM_CounterCompareModule compModule, uint16_t compCount);
//*****************************************************************************
//
//! 设置 PWM 周期计数值。
//!
//! \param base 是 EPWM 模块的基地址。
//! \param periodCount 是周期计数值。
//!
//! 此函数用于设置 PWM 的周期计数值。periodCount 的值将直接写入寄存器。
//! 用户应根据所需的波形周期或频率映射到正确的 periodCount。
//! 调用函数 EPWM_selectPeriodLoadEvent() 并传入适当的参数以设置周期计数的加载模式。
//! periodCount 的最大有效值为 0xFFFF。
//!
//! \return 无。
//
//*****************************************************************************
static inline void EPWM_setTimeBasePeriod(uint32_t base, uint16_t periodCount);

 浙公网安备 33010602011771号
浙公网安备 33010602011771号