
Linux常用软件安装
显卡驱动安装
显卡驱动
根据CUDA和英伟达驱动对照表。
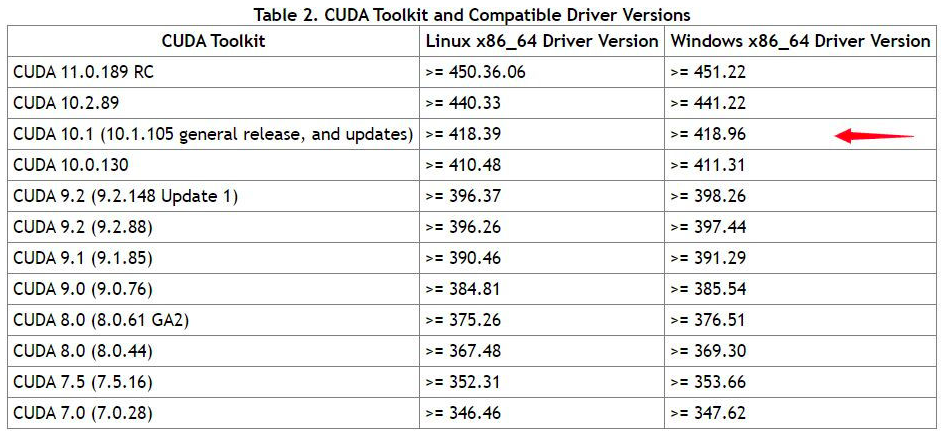
同时要注意Nvidia内核驱动和系统驱动要一致。
内核驱动查看方法:cat /proc/driver/nvidia/version
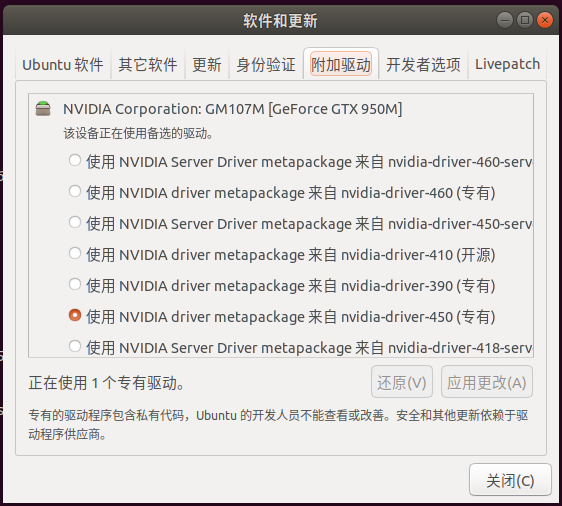
系统驱动查看(或者cat /var/log/dpkg.log | grep nvidia)和下载方法,切换完毕后可能需要重启。
CUDA
安装
下载deb包
安装deb包,添加密钥
sudo dpkg -i cuda-repo-ubuntu1604-10-0-local-10.0.130-410.48_1.0-1_amd64.deb
sudo apt-key add /var/cuda-repo-<version>/7fa2af80.pub
安装cuda,此处可能会出现软件依赖不对的问题。
可用sudo aptitude install cuda命令安装,能够列出依赖出错的地方,并提供解决方案。
sudo apt-get update
sudo apt-get install cuda
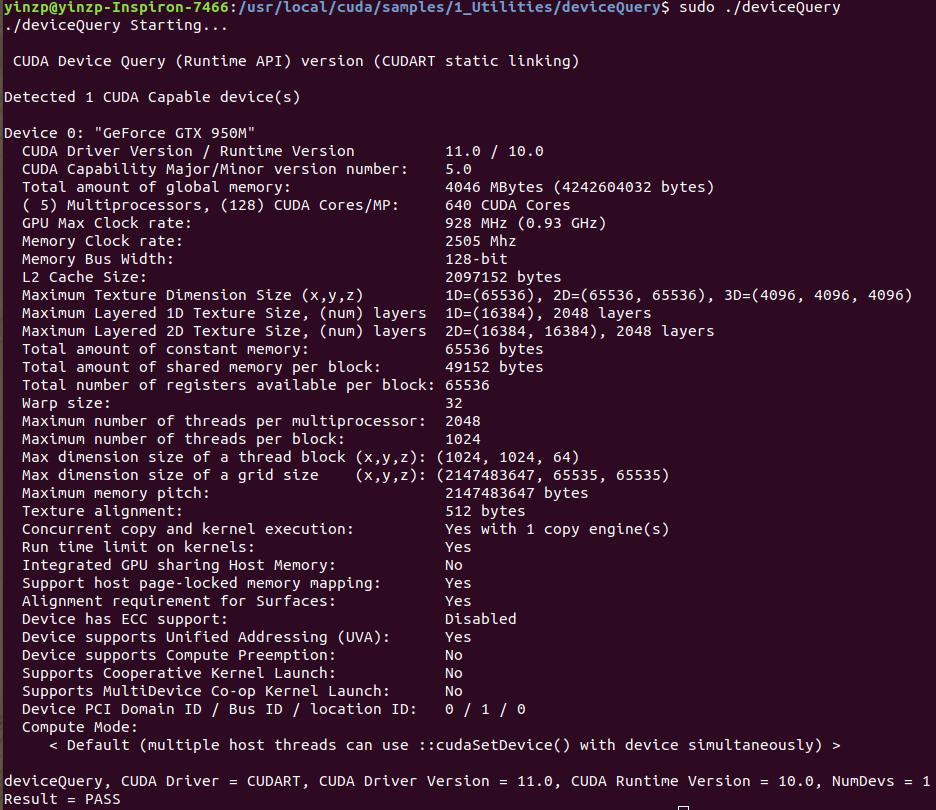
用cuda提供的例子检验是否安装成功,编译和执行权限不够时添加sudo
cd /usr/local/cuda/samples/1_Utilities/deviceQuery
make
./deviceQuery
安装成功会出现Result = pass
应用
- 写cmakelists.txt时:无第一步则无法
cuda_add_library,直接调用宏${CUDA_LIBS}找不到结果
find_package(CUDA REQUIRED)
include_directories(/usr/local/cuda/include)
link_directories(/usr/local/cuda/lib64)
TensorRT
安装
下载deb包,需要注册nvidia账号
最后一步会给你自动安装cudnn, nvinfer, nvinfer-plugin等
sudo dpkg -i nv-tensorrt-repo-ubuntu1604-cuda10.0-trt7.0.0.11-ga-20191216_1-1_amd64.deb
sudo apt update
sudo apt install tensorrt
应用
include_directories(/usr/include/x86_64-linux-gnu/)
link_directories(/usr/lib/x86_64-linux-gnu/)
libopencv
仓库timsc/opencv-3.3不支持ubuntu18.04,因此改为timsc/opencv-3.4
否则会缺少libopencv-dnn-dev libopencv-shape3.4
修改成timsc/opencv-3.4还是只有 libopencv-shape3.2,3.4版本的需要自己手动安装,可能和先安装了3.3没卸载干净有关
sudo add-apt-repository ppa:timsc/opencv-3.4
sudo apt-get update
sudo apt install libopencv-dev
# For TensorRT
sudo apt-get install libopencv-shape3.4
cd /usr/include
sudo mkdir opencv
OpenCV安装
- 查看依赖
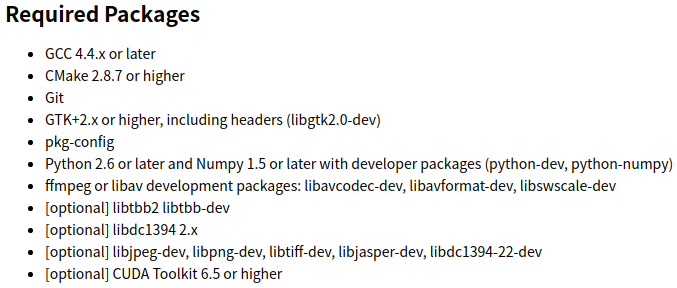
- 安装依赖项目(第三和第四步是为了防止报错:无法定位 libjasper-dev)
[compiler] sudo apt-get install build-essential
[required] sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
[optional] sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
ROS安装
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654sudo apt updatesudo apt install ros-melodic-desktop-fullsudo rosdep init这步会报错找不到rosddep命令,需要先安装sudo apt-get install python-rosdep2(具体2还是1不确定,自己用的2)rosdep update这步需要KX上网,否则要改hosts,很难
若KX上网后仍然无法成功,则下载这里的五个文件和文件夹,用sudo cp将它们拷贝至/etc/ros/rosdep/文件夹下(该文件夹原有的source.list.d可删除)

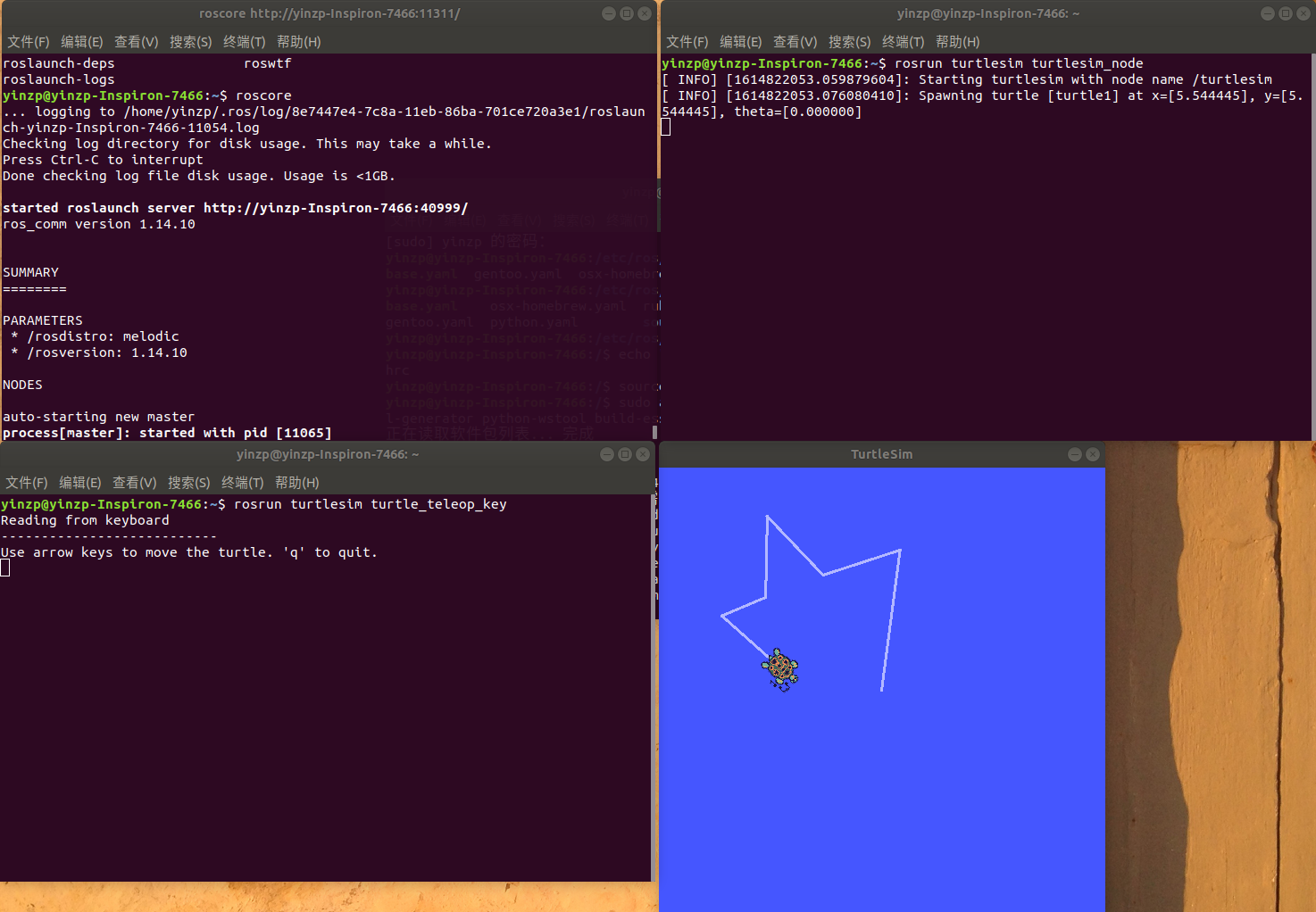
检测是否成功
- 开一个终端运行
roscore(若提示无法找到命令则重新运行sudo apt install ros-melodic-desktop-full) - 开一个终端运行
rosrun turtlesim turtlesim_node会出现小乌龟 - 开一个终端运行
rosrun turtlesim turtle_teleop_key,可以在该终端下通过键盘操控乌龟行走


 浙公网安备 33010602011771号
浙公网安备 33010602011771号