

DeepSeek-DSA讲解
1. MQA: Multi-Query Attention
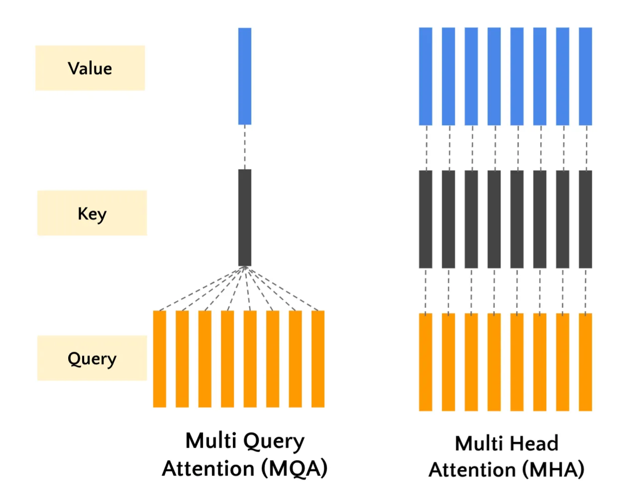
多查询注意力机制 (MQA) 是 Transformer 中使用的传统多头自注意力机制(MHA)的一种变体。在传统的多头注意力机制中,每个注意力头都使用自己的一组查询、键和值,这可能需要大量计算,尤其是在注意力头数量增加的情况下。MQA 通过在多个注意力头之间共享同一组键和值,同时为每个注意力头维护不同的查询,简化了这一过程。这种方法减少了计算和内存开销,而不会显著影响模型的性能。
多查询注意力机制的关键概念:
- 共享键和值:与传统的多头注意力(其中每个头都有自己的键和值)不同,MQA 对所有注意力头使用相同的键和值。
- 不同查询:MQA 中的每个注意力头仍然使用自己的一组查询,从而允许它从不同方面关注输入序列。
- 效率:通过共享键和值,MQA 减少了所需的计算量和内存,使其比传统的多头注意力更高效。
多查询注意力机制的好处:
- 降低计算复杂度:通过共享键和值,MQA 显著减少了所需的操作数量,使其比传统的多头注意力更高效。
- 更低的内存使用率:MQA 通过存储更少的键和值矩阵来减少内存使用率,这对于处理长序列特别有益。
- 保持性能:尽管效率有所提高,MQA 仍保持与传统多头注意力机制相媲美的竞争性能,使其成为大规模 NLP 任务的可行选择。
代码实现
import torch from torch import nn class MultiQueryAttention(nn.Module): def __init__(self, hidden_size, num_heads): super(MultiQueryAttention, self).__init__() self.num_heads = num_heads self.head_dim = hidden_size // num_heads self.q_linear = nn.Linear(hidden_size, hidden_size) self.k_linear = nn.Linear(hidden_size, self.head_dim) self.v_linear = nn.Linear(hidden_size, self.head_dim) self.o_linear = nn.Linear(hidden_size, hidden_size) def forward(self, hidden_state, attention_mask=None): batch_size = hidden_state.size()[0] query = self.q_linear(hidden_state) key = self.k_linear(hidden_state) value = self.v_linear(hidden_state) query = self.split_head(query) key = self.split_head(key, 1) value = self.split_head(value, 1) attention_scores = torch.matmul(query, key.transpose(-1, -2)) / torch.sqrt(torch.tensor(self.head_dim)) if attention_mask is not None: attention_scores += attention_mask * -1e-9 attention_probs = torch.softmax(attention_scores, dim=-1) output = torch.matmul(attention_probs, value) output = output.transpose(-1, -2).contiguous().view(batch_size, -1, self.head_dim * self.num_heads) output = self.o_linear(output) return output def split_head(self, x, head_num=None): batch_size = x.size()[0] if head_num is None: return x.view(batch_size, -1, self.num_heads, self.head_dim).transpose(1, 2) else: return x.view(batch_size, -1, head_num, self.head_dim).transpose(1, 2) # 使用示例 hidden_state = torch.rand(32, 10, 512) # 假设输入维度为 (batch_size=32, seq_len=10, hidden_size=512) attention_mask = None # 可选的注意力掩码 mqa_layer = MultiQueryAttention(hidden_size=512, num_heads=8) output = mqa_layer(hidden_state, attention_mask) print(output.shape) # 输出形状应为 (32, 10, 512)
2. GQA:Group Query Attention
组查询注意力 (GQA) 是对 Transformer 中使用的传统多头自注意力机制和多查询注意力机制的折中。在标准多头自注意力中,每个注意力头独立处理整个序列。这种方法虽然功能强大,但计算成本高昂,尤其是对于长序列。而MQA虽然通过在多个注意力头之间共享同一组键和值简化了这一过程,但其简化也不可避免的带来了一些精度的损失。GQA 通过将查询分组在一起来解决此问题,从而降低了计算复杂性,而不会显著影响性能。

组查询注意力机制的关键概念:
- 分组查询:在 GQA 中,查询根据其相似性或其他标准分组。这允许模型在类似的查询之间共享计算,从而减少所需的总体操作数量。
- 共享键和值表示:GQA 不会为每个查询计算单独的键和值表示,而是为每个组计算共享键和值表示。这进一步减少了计算负载和内存使用量。
- 高效计算:通过分组查询和共享计算,GQA 可以更高效地处理更长的序列,使其适合需要处理大量文本或数据的任务。
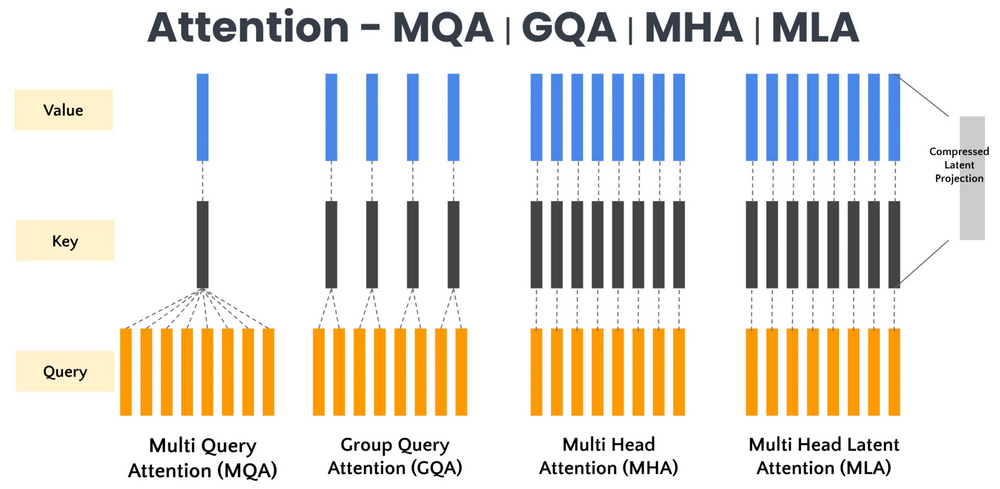
实际上,MHA和MQA都可以看作是GQA的特殊情况:
- 当组数 g 与 头数 head 相等时,GQA = MHA。
- 当组数 g 为 1 时,GQA = MQA。
大家如果对卷积算法比较熟悉的话,MHA, MQA, GQA 的关系与卷积,逐通道卷积,组卷积的关系是一致的。
代码实现
import torch import torch.nn as nn class GroupedQueryAttention(nn.Module): def __init__(self, hidden_size, num_heads, group_num): super(GroupedQueryAttention, self).__init__() self.num_heads = num_heads self.head_dim = hidden_size // num_heads self.group_num = group_num self.q_linear = nn.Linear(hidden_size, hidden_size) self.k_linear = nn.Linear(hidden_size, self.group_num * self.head_dim) self.v_linear = nn.Linear(hidden_size, self.group_num * self.head_dim) self.o_linear = nn.Linear(hidden_size, hidden_size) def forward(self, hidden_state, attention_mask=None): batch_size = hidden_state.size()[0] query = self.q_linear(hidden_state) key = self.k_linear(hidden_state) value = self.v_linear(hidden_state) query = self.split_head(query) key = self.split_head(key, self.group_num) value = self.split_head(value, self.group_num) attention_scores = torch.matmul(query, key.transpose(-1, -2)) / torch.sqrt(torch.tensor(self.head_dim)) if attention_mask is not None: attention_scores += attention_mask * -1e-9 attention_probs = torch.softmax(attention_scores, dim=-1) output = torch.matmul(attention_probs, value) output = output.transpose(-1, -2).contiguous().view(batch_size, -1, self.head_dim * self.num_heads) output = self.o_linear(output) return output def split_head(self, x, group_num=None): batch_size = x.size()[0] if group_num is None: return x.view(batch_size, -1, self.num_heads, self.head_dim).transpose(1, 2) x = x.view(batch_size, -1, group_num, self.head_dim).transpose(1, 2) x = x[:, :, None, :, :].expand(batch_size, group_num, self.num_heads // group_num, -1, -1).reshape(batch_size, -1, -1) return x
3. MLA: Multi Head Latent Attention
多头潜在注意力 (MLA) 将潜在特征表示纳入注意力机制,以降低计算复杂度并改善上下文表示。MLA的核心是对KV进行压缩后,再送入标准的MHA算法中,用一个更短的k,v向量来进行计算,进而减少KV Cache的大小。
上图中的公式描述了多头注意力机制(Multi-Head Attention, MHA)中潜在向量(latent vectors)的计算过程。以下是对这些公式的逐步解读:
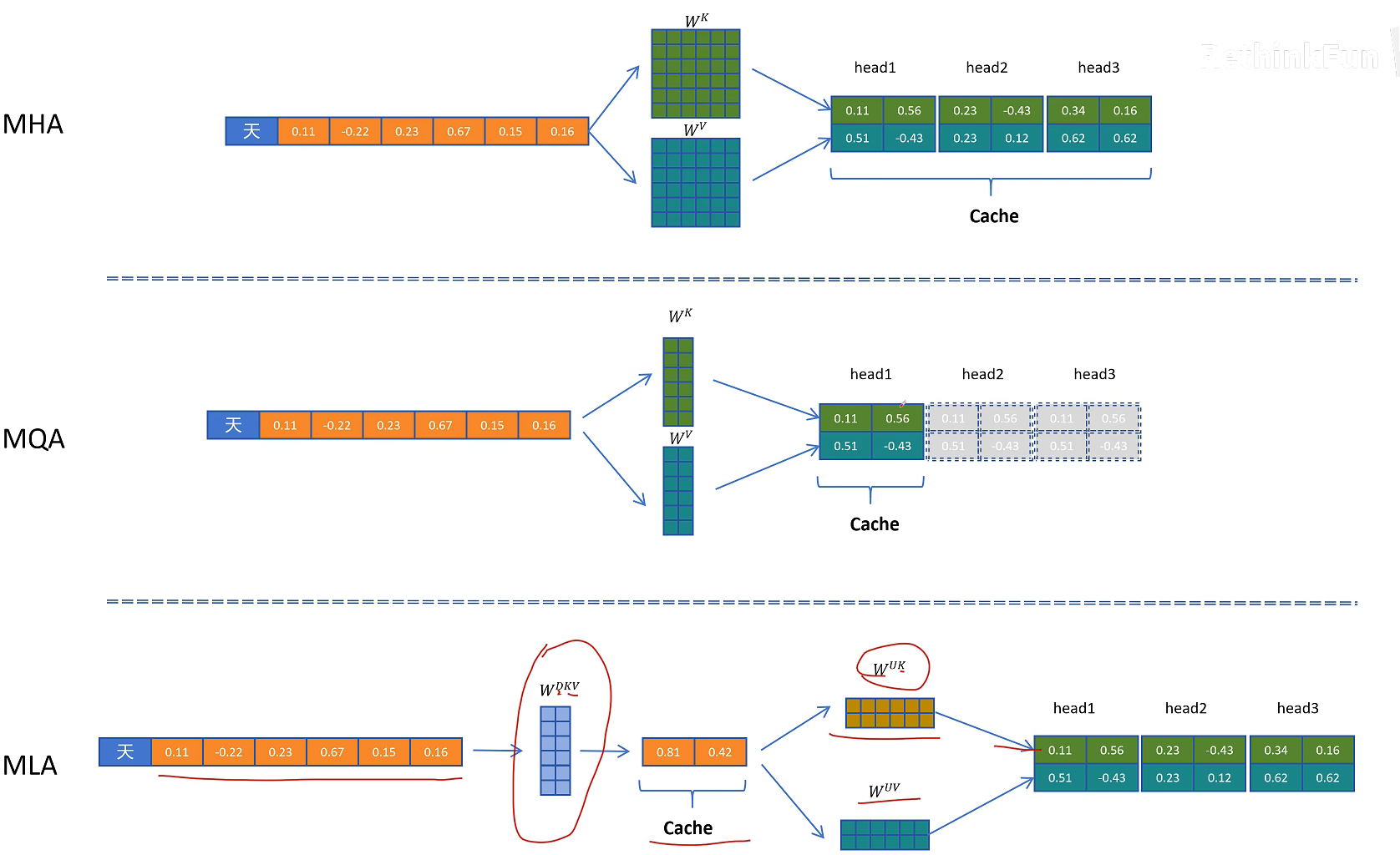
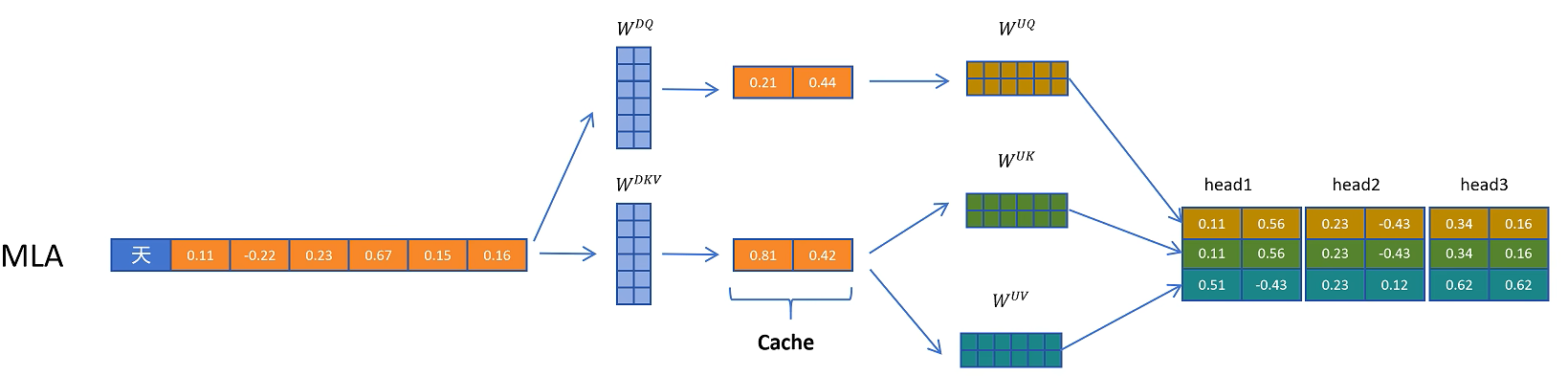
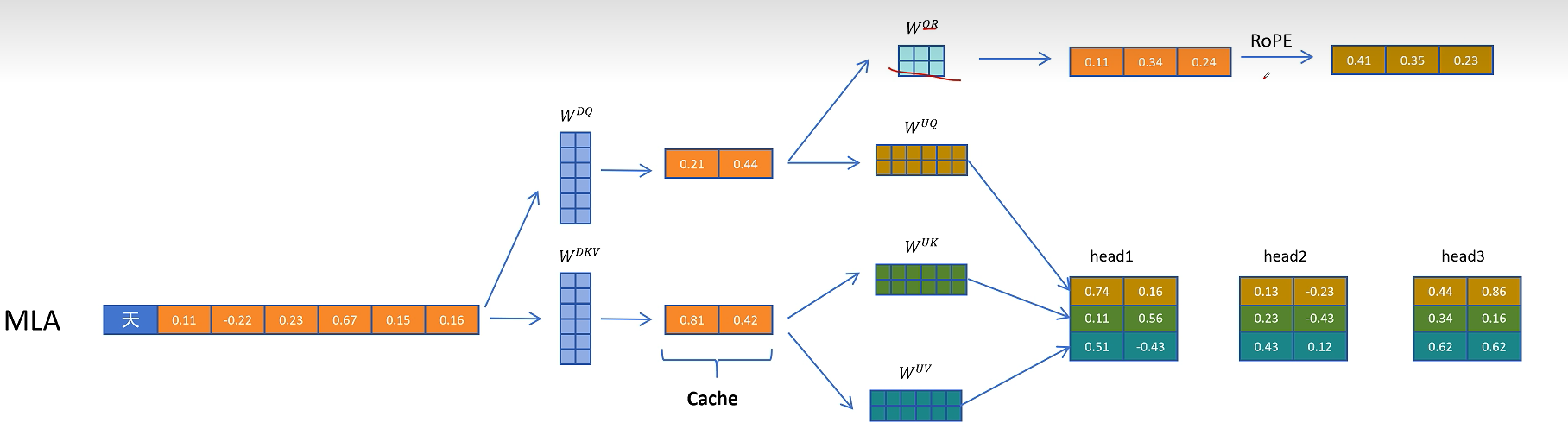
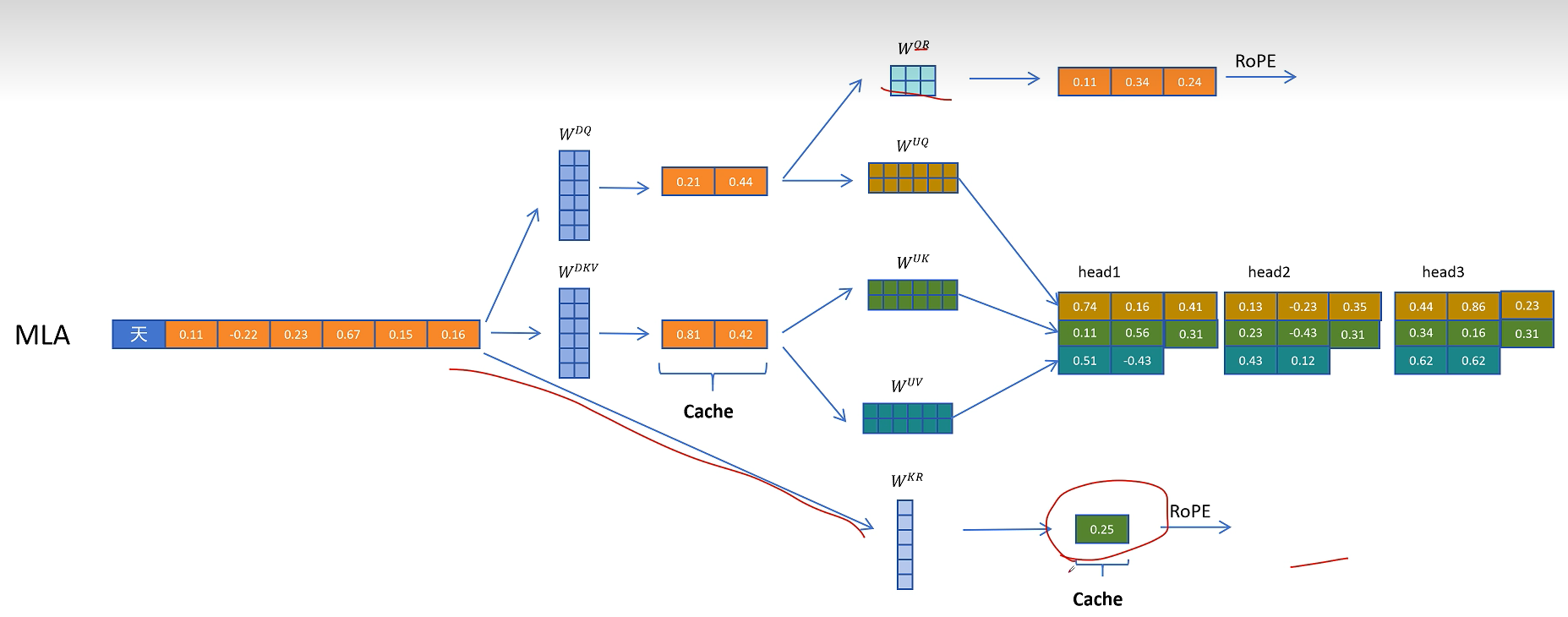
它的原理也很简单,就是对token的特征向量,通过一个参数矩阵进行压缩转换,这个参数我们把它叫做W_dkv,d就是down的意思,表示向下压缩,kv就是K和V向量的意思。比如这里原来的特征维度是6,经过W_dkv压缩到了2维,然后我们只需要缓存这个2维的KV向量,在进行计算时需要用到真实的K和V向量,再从KV压缩向量,通过2个解压矩阵转换为原来的维度就可以了。
把KV压缩向量进行解压,投影到实际K向量的参数矩阵叫做W_uk,u是up的意思,表示向上升维,k表示K向量。同理对V向量进行解压的升维的参数矩阵叫做W_uv.

这时我们可以比较一下原始MHA的KV Cache的缓存量以及MQA的缓存量
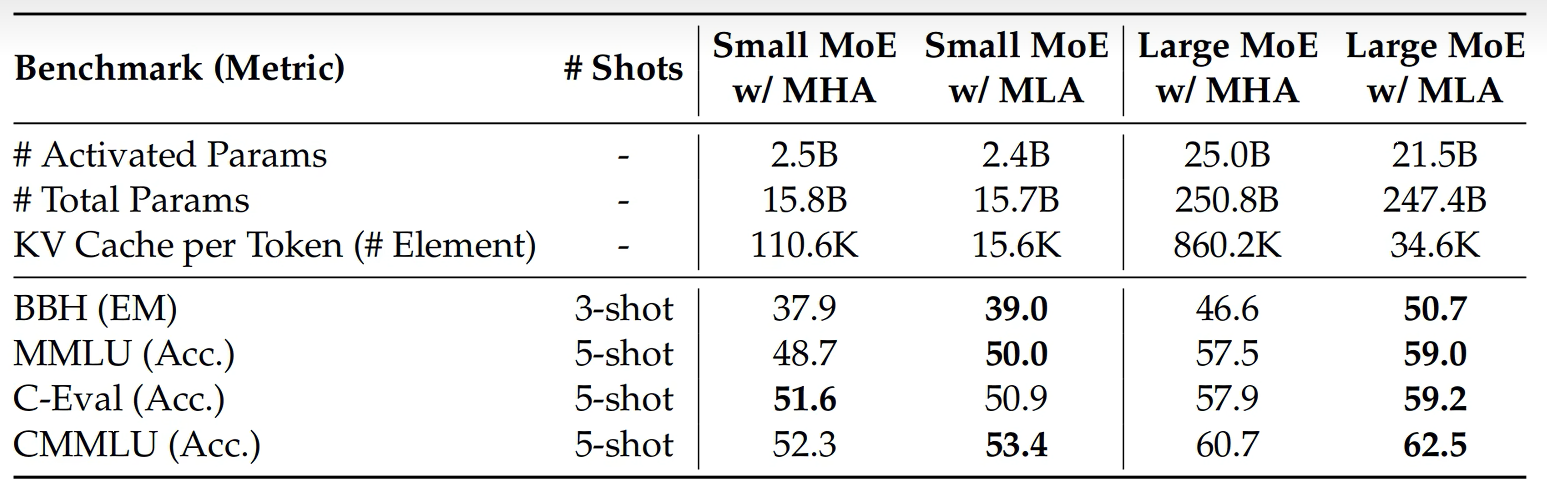
MLA确实能减少KV Cacha的缓存量,但是会影响模型的效果吗?DeepSeek同样进行了实验来验证。结果惊喜的发现,MLA的模型效果比MHA还要好。所以MLA相比标准的MHA不仅KV Cacha大幅减小,而且意想不到的是模型效果还有提升。
这一切都非常不错,但是KV Cache的本意是什么呢?它是为了减少推理时对之前token的KV向量的计算而产生的,MLA因为缓存了压缩的KV Cache而减小了显存占用,但是在取出缓存后K和V不能直接使用,还是要经过解压计算才可以,这不是在推理时又引入了解压这个额外的计算吗?这和KV Cache的初衷是相悖的。
我们看一下KV Cache的推理过程,标准的MHA对于当前的token计算QKV,然后缓存K和V向量,对于之前的token,直接从缓存中取出K和V向量就可以,然后进行Attention的计算。
但是MLA对于当前token的计算,Q的计算不变,但是在K和V的计算时,先通过W_dkv参数矩阵进行压缩,然后生成压缩的KV的隐特征C_kv,并将C_kv缓存在KV Cache里。KV向量通过将KV的压缩隐特征C_kv分别与解压参数矩阵W_uk和W_uv进行相乘,得到当前token的K和V向量。对于之前的token,则从KV Cache里取出压缩的隐特征向量C_kv,然后经过K和V向量的解压参数矩阵投影,得到可以计算的K和V向量。
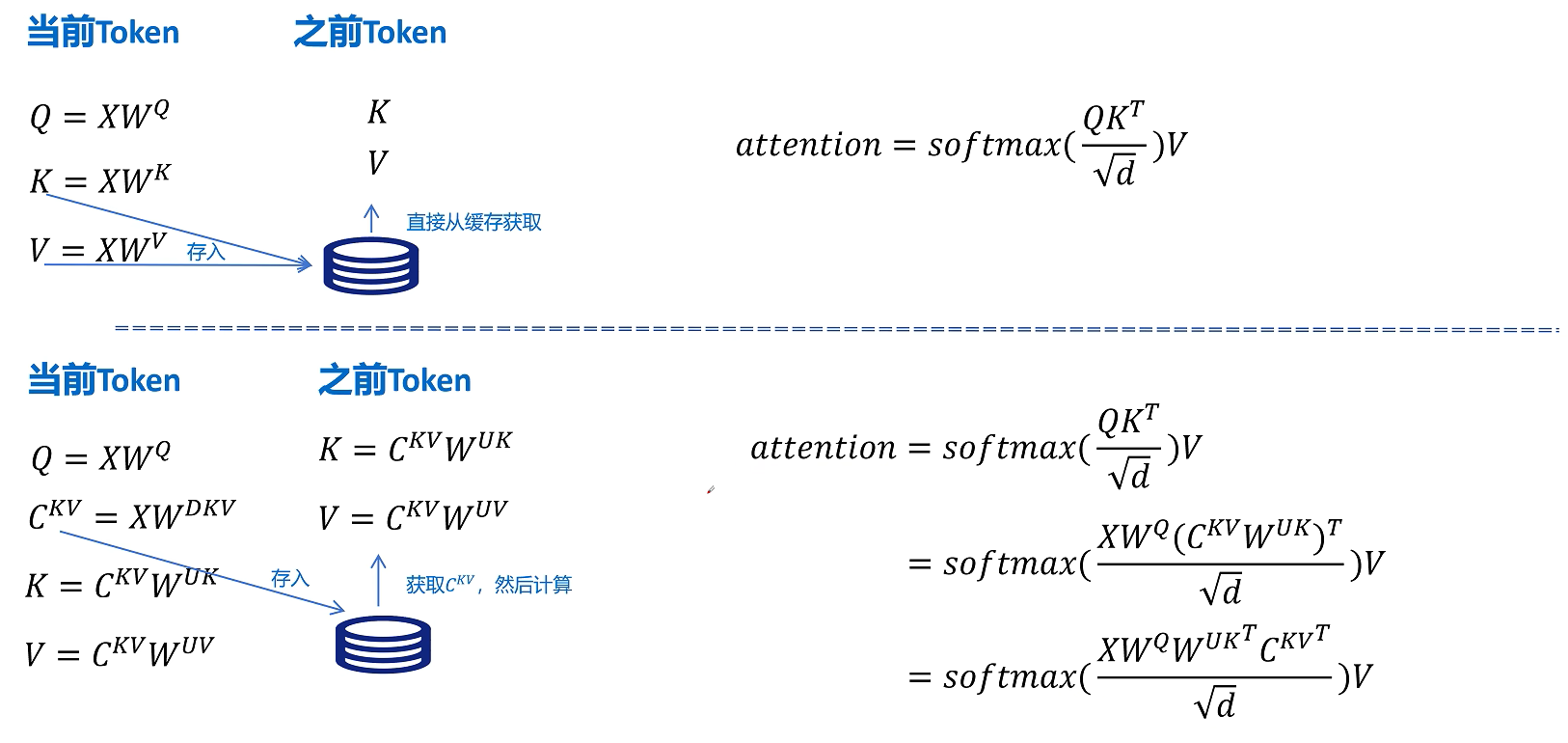
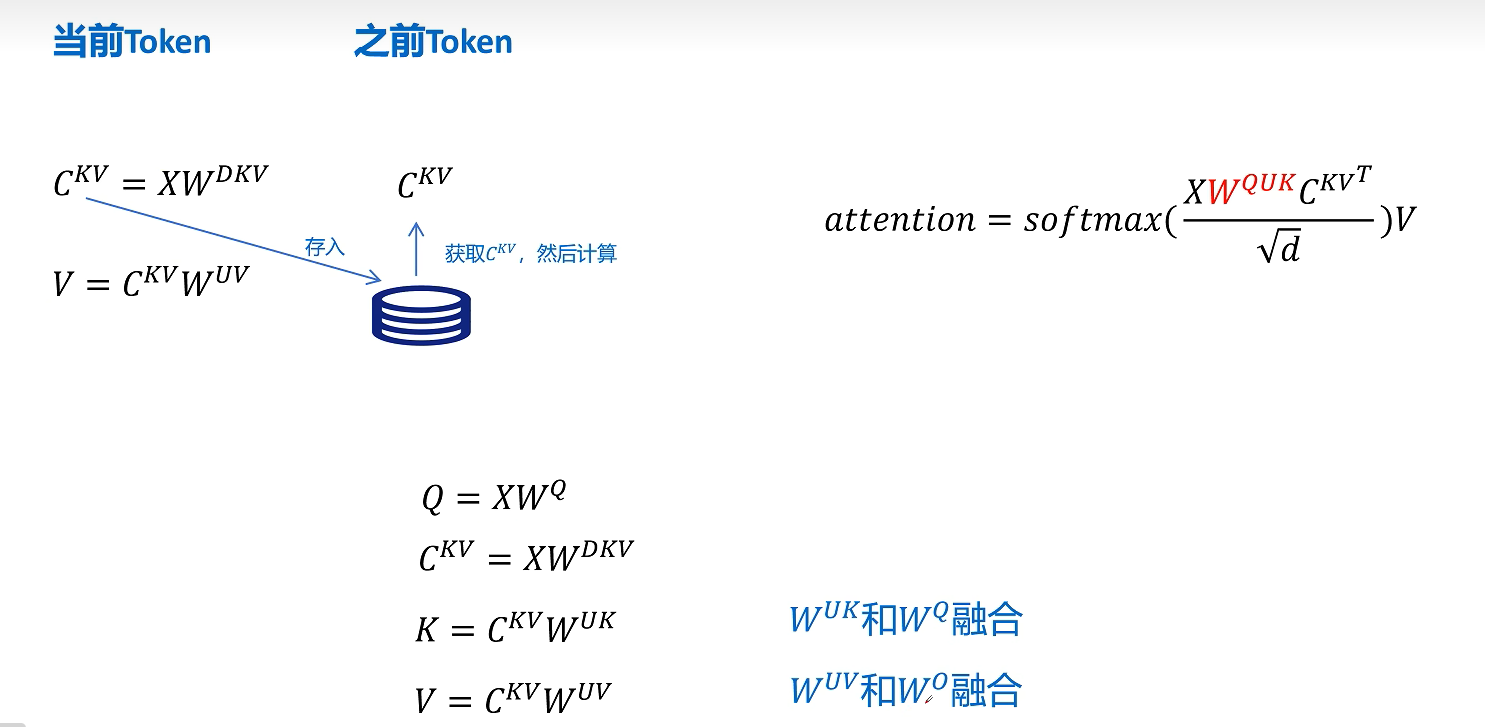
所以进行注意力计算时它的公式是这样的,我们主要关注的是这里的Q和K_T,代入Q=X*W_q, K=C_kv * W_uk,其中W_q * W_uk可以进行融合,这个融合可以在推理之前计算好,这样在推理时就不用额外对K的解压计算了,这样我们通过矩阵相乘的结合律对矩阵进行提前的融合,就可以规避MLA引入推理时因解压隐特征带来的额外计算了

刚才我们详细看了W_uk可以和W_q进行融合,同样对于V向量进行解压的W_uv也可以和W_o进行融合。
MLA除了对K和V向量进行压缩外,对Q向量也进行了压缩,这样的好处是降低了参数量,而且可以提高模型的性能,可以看到这里通过W_dq对Q向量进行了压缩,通过W_uq对Q向量进行解压,但是Q的隐向量不需要缓存,只需要缓存KV公用的KV压缩隐向量即可。
刚才我们一直没有讨论为止编码,确切的说是旋转位置编码RoPE,现在旋转位置编码RoPE已经是大模型默认的位置编码方式了,我们知道旋转位置编码需要对每一层的Q和K向量进行旋转。而且根据token位置的不同,旋转矩阵的参数也不同,这里以第i个token的Q向量和第j个token的K向量进行点积运算为例。如果不考虑旋转位置编码,就是之前所说的W_uk可以和W_q进行融合。但是如果考虑旋转矩阵呢?因为不同位置的旋转矩阵不同,这里我们用R_i和R_j表示,可以发现如果增加了旋转矩阵,它就出现在了W_q和W_uk之间,而且因为R_i和R_j和位置相关,它不能和这两个矩阵进行融合,所以它破坏了之前想到的推理时矩阵提前融合的方案。

DeepSeek最终想到了一个解决方案,就是给Q和K向量额外增加一些维度来表示位置信息。对于Q向量,它通过W_qr为每一个头生成一些原始特征,这里q代表Q向量,r代表旋转位置编码。

然后通过旋转位置编码增加位置信息。
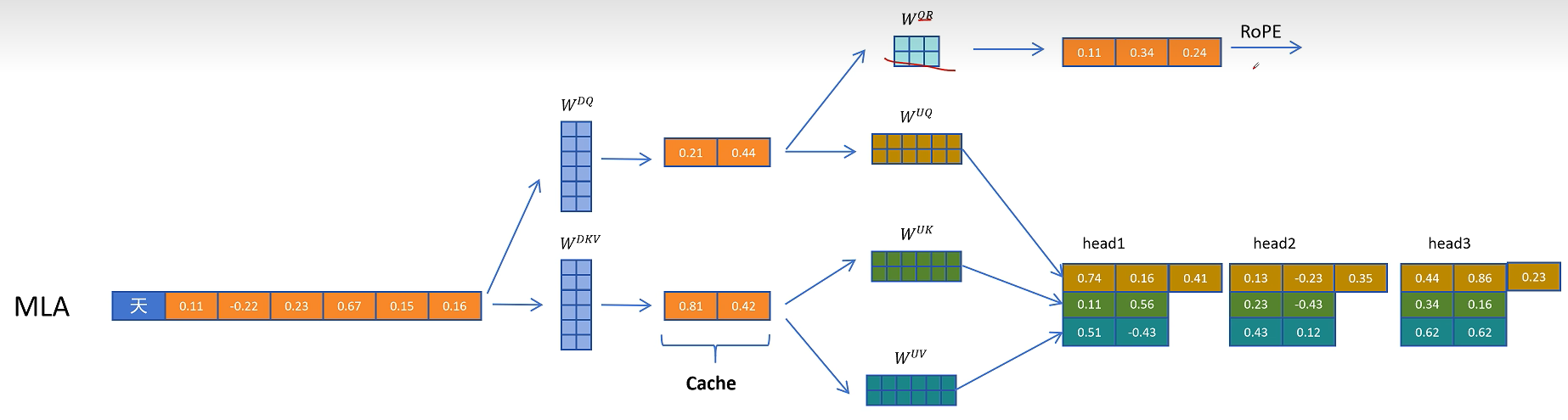
再把生成带有位置信息的特征拼接到每个注意力头的Q向量。
对于K向量,通过W_kr矩阵生成一个头的共享特征,通过旋转位置编码增加位置信息。
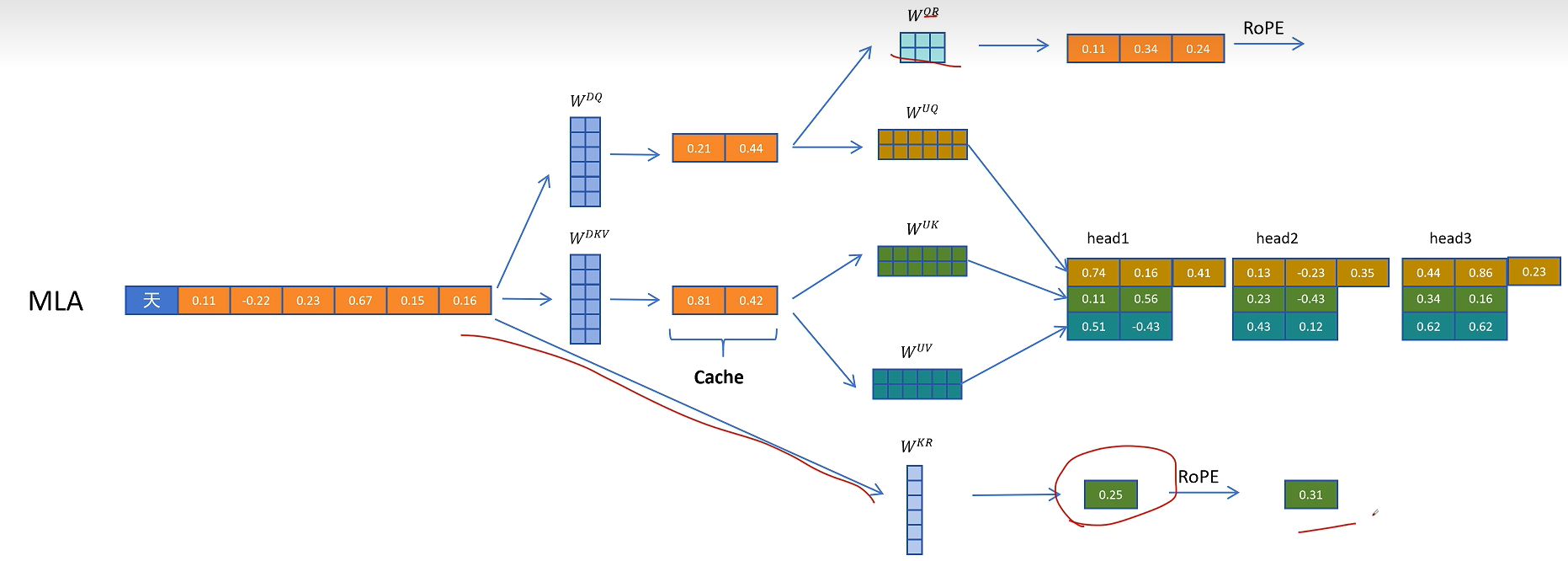
然后复制到多个头共享位置信息。
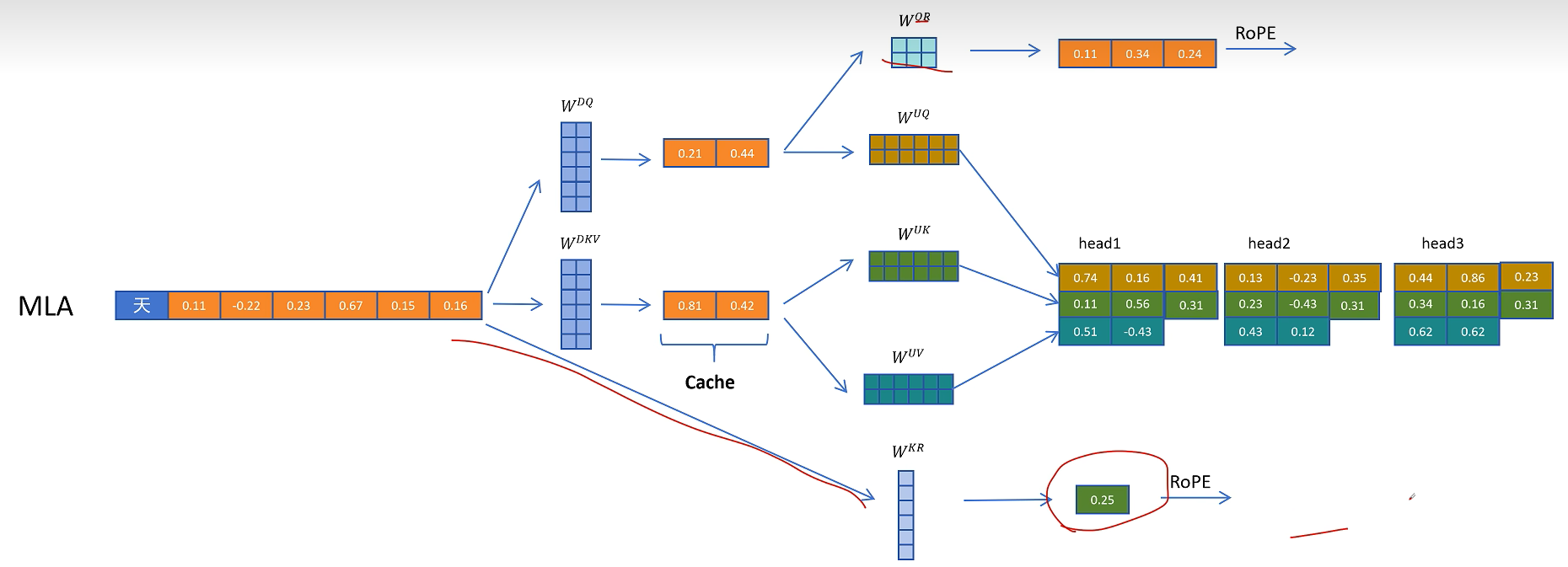
这里多头共享带位置编码的K向量也需要被缓存,以便在生成带位置信息的K向量时用到。
在推理时不带旋转位置编码的Q和K进行点积运算,这里的计算可以用融合的矩阵来消除解压操作。带旋转位置编码的部分进行点积计算,然后得到的两个值相加,就相当于对拼接了位置信息的完整的Q和K向量进行点积操作的值。 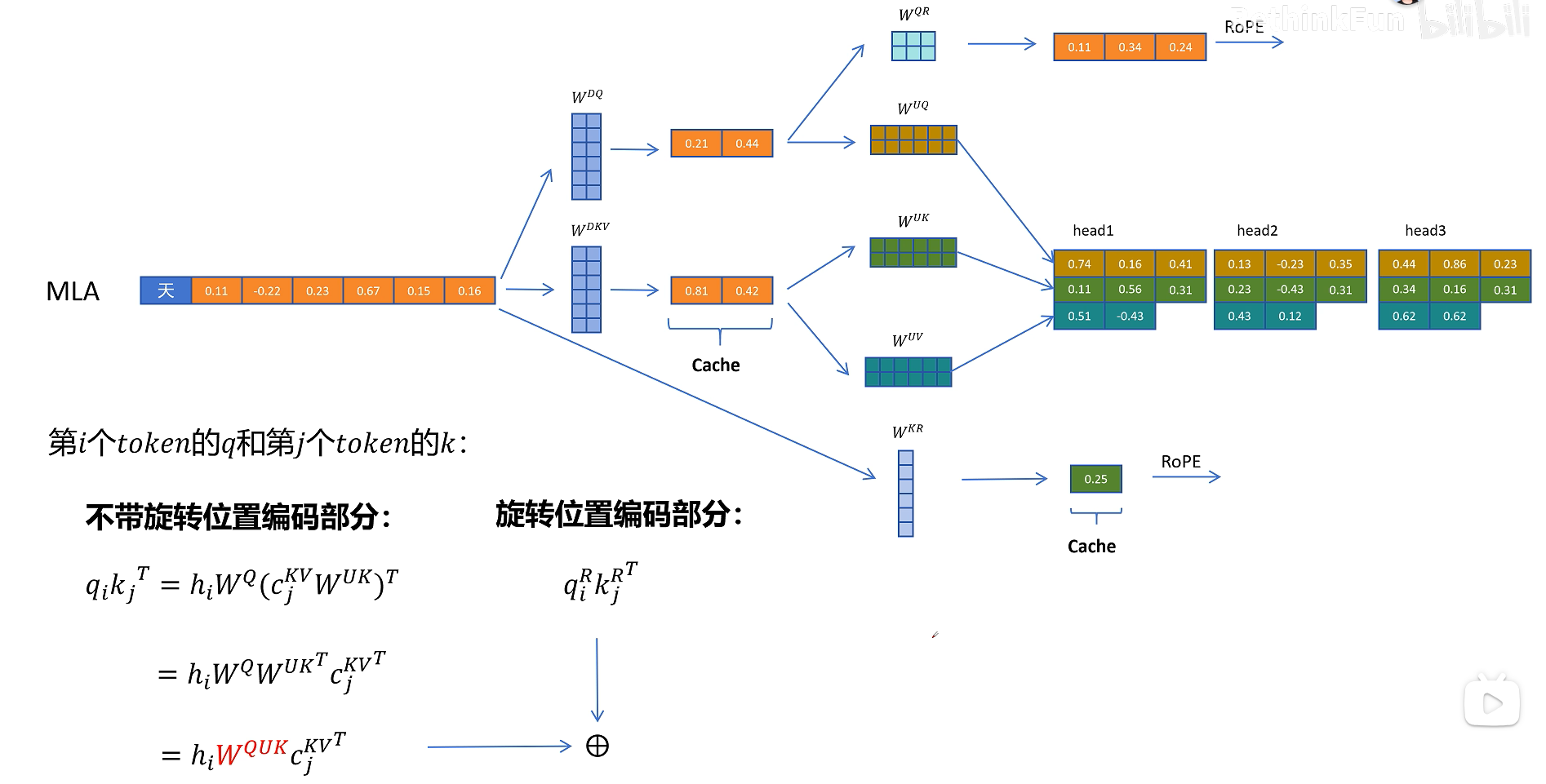
到这里终于得到了最终的解决方案,得到了一个既兼容旋转位置编码的压缩KV Cache的方案,同时也可以提升模型的性能。
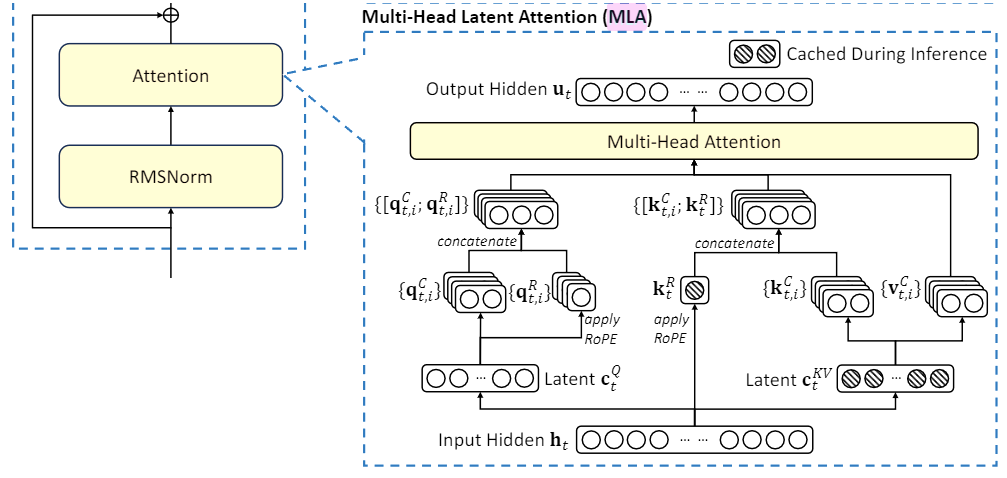
最后我们来回顾一下论文里面的MLA的图,首先是输入的token特征H,通过它生成压缩的KV特征和压缩的Q向量,然后压缩的KV特征解压为多头的K和V特征,从输入特征H生成多头共享的带旋转位置编码的K_r,再把K_c和K_r合并形成最终带位置编码的K向量。
在看Q向量这边,通过解压生成多头的Q向量,然后从压缩的Q向量生成多头带位置编码的Q_r,然后合并Q_c和Q_r生成最终带位置编码的Q向量。
接着QKV向量进行多头注意力计算。注意图中阴影部分为需要缓存的中间变量。其中只有KV公用的压缩隐特征和K的多头共享的带位置编码的向量需要缓存。
代码实现
import torch import torch.nn as nn import torch.nn.functional as F import math class RMSNorm(nn.Module): """Root Mean Square Layer Normalization""" def __init__(self, dim, eps=1e-6): super().__init__() self.dim = dim self.eps = eps self.weight = nn.Parameter(torch.ones(dim)) def forward(self, x): # 计算RMS Norm variance = x.pow(2).mean(-1, keepdim=True) x = x * torch.rsqrt(variance + self.eps) return x * self.weight def precompute_freqs_cis(dim, max_seq_len, theta=10000.0): """预计算位置编码的复数表示""" freqs = 1.0 / (theta ** (torch.arange(0, dim, 2).float() / dim)) t = torch.arange(max_seq_len).float() freqs = torch.outer(t, freqs) freqs_cis = torch.polar(torch.ones_like(freqs), freqs) return freqs_cis def apply_rotary_emb(x, freqs_cis): """应用旋转位置编码""" x_complex = torch.view_as_complex(x.float().reshape(*x.shape[:-1], -1, 2)) freqs_cis = freqs_cis.view(1, x_complex.size(1), 1, x_complex.size(-1)) x_rotated = torch.view_as_real(x_complex * freqs_cis).flatten(3) return x_rotated.type_as(x) class MLA(nn.Module): """多头潜在注意力(Multi-head Latent Attention)""" def __init__(self, dim, n_heads, qk_nope_head_dim=128, # 非位置编码部分的头维度 qk_rope_head_dim=64, # 位置编码部分的头维度 v_head_dim=128, # 值的头维度 q_lora_rank=0, # 查询的低秩投影维度 kv_lora_rank=512, # 键值的低秩投影维度 dropout=0.0, attn_impl="naive"): # 注意力实现方式:naive或absorb super().__init__() self.dim = dim self.n_heads = n_heads self.qk_nope_head_dim = qk_nope_head_dim self.qk_rope_head_dim = qk_rope_head_dim self.qk_head_dim = qk_nope_head_dim + qk_rope_head_dim self.v_head_dim = v_head_dim self.q_lora_rank = q_lora_rank self.kv_lora_rank = kv_lora_rank self.attn_impl = attn_impl # 计算注意力缩放因子 self.softmax_scale = self.qk_head_dim ** -0.5 # 针对查询的投影层 - 可选使用低秩投影 if self.q_lora_rank == 0: # 直接投影 self.wq = nn.Linear(dim, n_heads * self.qk_head_dim) else: # 使用低秩投影 (LoRA) self.wq_a = nn.Linear(dim, self.q_lora_rank) self.q_norm = RMSNorm(self.q_lora_rank) self.wq_b = nn.Linear(self.q_lora_rank, n_heads * self.qk_head_dim) # 键值使用低秩投影 self.wkv_a = nn.Linear(dim, self.kv_lora_rank + self.qk_rope_head_dim) self.kv_norm = RMSNorm(self.kv_lora_rank) self.wkv_b = nn.Linear(self.kv_lora_rank, n_heads * (self.qk_nope_head_dim + self.v_head_dim)) # 输出投影 self.wo = nn.Linear(n_heads * self.v_head_dim, dim) # dropout层 self.dropout = nn.Dropout(dropout) def forward(self, x, start_pos, freqs_cis, attention_mask=None, max_seq_len=4096): batch_size, seq_len, _ = x.shape end_pos = start_pos + seq_len # 生成q向量 - 可选使用低秩投影 if self.q_lora_rank == 0: q = self.wq(x) else: q = self.wq_b(self.q_norm(self.wq_a(x))) # 将q分为非位置编码部分和位置编码部分 q = q.view(batch_size, seq_len, self.n_heads, self.qk_head_dim) q_nope, q_pe = torch.split(q, [self.qk_nope_head_dim, self.qk_rope_head_dim], dim=-1) # 应用旋转位置编码到q_pe q_pe = apply_rotary_emb(q_pe, freqs_cis) # 生成kv向量 - 使用低秩投影 kv = self.wkv_a(x) kv, k_pe = torch.split(kv, [self.kv_lora_rank, self.qk_rope_head_dim], dim=-1) k_pe = apply_rotary_emb(k_pe.unsqueeze(2), freqs_cis) # 使用naive方式实现注意力 if self.attn_impl == "naive": # 完整的query向量 q = torch.cat([q_nope, q_pe], dim=-1) # 通过低秩投影生成键值 kv = self.wkv_b(self.kv_norm(kv)) kv = kv.view(batch_size, seq_len, self.n_heads, self.qk_nope_head_dim + self.v_head_dim) k_nope, v = torch.split(kv, [self.qk_nope_head_dim, self.v_head_dim], dim=-1) # 完整的key向量 k = torch.cat([k_nope, k_pe.expand(-1, -1, self.n_heads, -1)], dim=-1) # 创建KV缓存 k_cache = torch.zeros(batch_size, max_seq_len, self.n_heads, self.qk_head_dim, device=x.device, dtype=x.dtype) v_cache = torch.zeros(batch_size, max_seq_len, self.n_heads, self.v_head_dim, device=x.device, dtype=x.dtype) # 更新KV缓存 k_cache[:, start_pos:end_pos] = k v_cache[:, start_pos:end_pos] = v # 计算注意力分数 scores = torch.einsum("bshd,bthd->bsht", q, k_cache[:, :end_pos]) * self.softmax_scale else: # absorb方式实现注意力 # 获取wkv_b权重 wkv_b = self.wkv_b.weight.view(self.n_heads, -1, self.kv_lora_rank) # 计算q_nope与权重的点积 q_nope = torch.einsum("bshd,hdc->bshc", q_nope, wkv_b[:, :self.qk_nope_head_dim]) # 创建KV缓存 kv_cache = torch.zeros(batch_size, max_seq_len, self.kv_lora_rank, device=x.device, dtype=x.dtype) pe_cache = torch.zeros(batch_size, max_seq_len, self.qk_rope_head_dim, device=x.device, dtype=x.dtype) # 更新KV缓存 kv_cache[:, start_pos:end_pos] = self.kv_norm(kv) pe_cache[:, start_pos:end_pos] = k_pe.squeeze(2) # 计算注意力分数 - 分别计算非位置编码部分和位置编码部分 scores = (torch.einsum("bshc,btc->bsht", q_nope, kv_cache[:, :end_pos]) + torch.einsum("bshr,btr->bsht", q_pe, pe_cache[:, :end_pos])) * self.softmax_scale # 应用注意力掩码 if attention_mask is not None: scores += attention_mask.unsqueeze(1) # 注意力权重计算 attn_weights = F.softmax(scores, dim=-1, dtype=torch.float32).type_as(x) attn_weights = self.dropout(attn_weights) # 计算输出 if self.attn_impl == "naive": output = torch.einsum("bsht,bthd->bshd", attn_weights, v_cache[:, :end_pos]) else: # 先与kv_cache相乘 output = torch.einsum("bsht,btc->bshc", attn_weights, kv_cache[:, :end_pos]) # 再与权重相乘生成最终输出 output = torch.einsum("bshc,hdc->bshd", output, wkv_b[:, -self.v_head_dim:]) # 重塑并投影到原始维度 output = output.reshape(batch_size, seq_len, -1) return self.wo(output) class MLABlock(nn.Module): """包含MLA注意力机制的Transformer块""" def __init__(self, dim=768, n_heads=12, qk_nope_head_dim=128, qk_rope_head_dim=64, v_head_dim=128, q_lora_rank=0, kv_lora_rank=512, mlp_ratio=4, dropout=0.1, attn_impl="naive"): super().__init__() # 注意力层 self.attention = MLA( dim=dim, n_heads=n_heads, qk_nope_head_dim=qk_nope_head_dim, qk_rope_head_dim=qk_rope_head_dim, v_head_dim=v_head_dim, q_lora_rank=q_lora_rank, kv_lora_rank=kv_lora_rank, dropout=dropout, attn_impl=attn_impl ) # 前馈网络 self.mlp = nn.Sequential( nn.Linear(dim, int(dim * mlp_ratio)), nn.GELU(), nn.Dropout(dropout), nn.Linear(int(dim * mlp_ratio), dim), nn.Dropout(dropout) ) # 层归一化 self.norm1 = RMSNorm(dim) self.norm2 = RMSNorm(dim) def forward(self, x, start_pos, freqs_cis, attention_mask=None): # 残差连接 + 注意力层 x = x + self.attention(self.norm1(x), start_pos, freqs_cis, attention_mask) # 残差连接 + 前馈网络 x = x + self.mlp(self.norm2(x)) return x
4. DSA: DeepSeek稀疏注意力机制( DeepSeek Sparse Attention)
DeepSeek-V3.2-Exp 与上一版本DeepSeek-V3.1-Terminus相比,核心创新在于引入了DeepSeek 稀疏注意力(DSA)。DSA 通过筛选与当前任务高度相关的文本,而非对全部历史 token 进行全量注意力计算,从而显著提升运算效率。
DSA 主要包含两项关键技术:闪电索引器(Lightning Indexer)和细粒度稀疏注意力(Fine-grained Sparse Attention)。整体实现基于 MLA 架构,主要流程可参考 Fig.1:
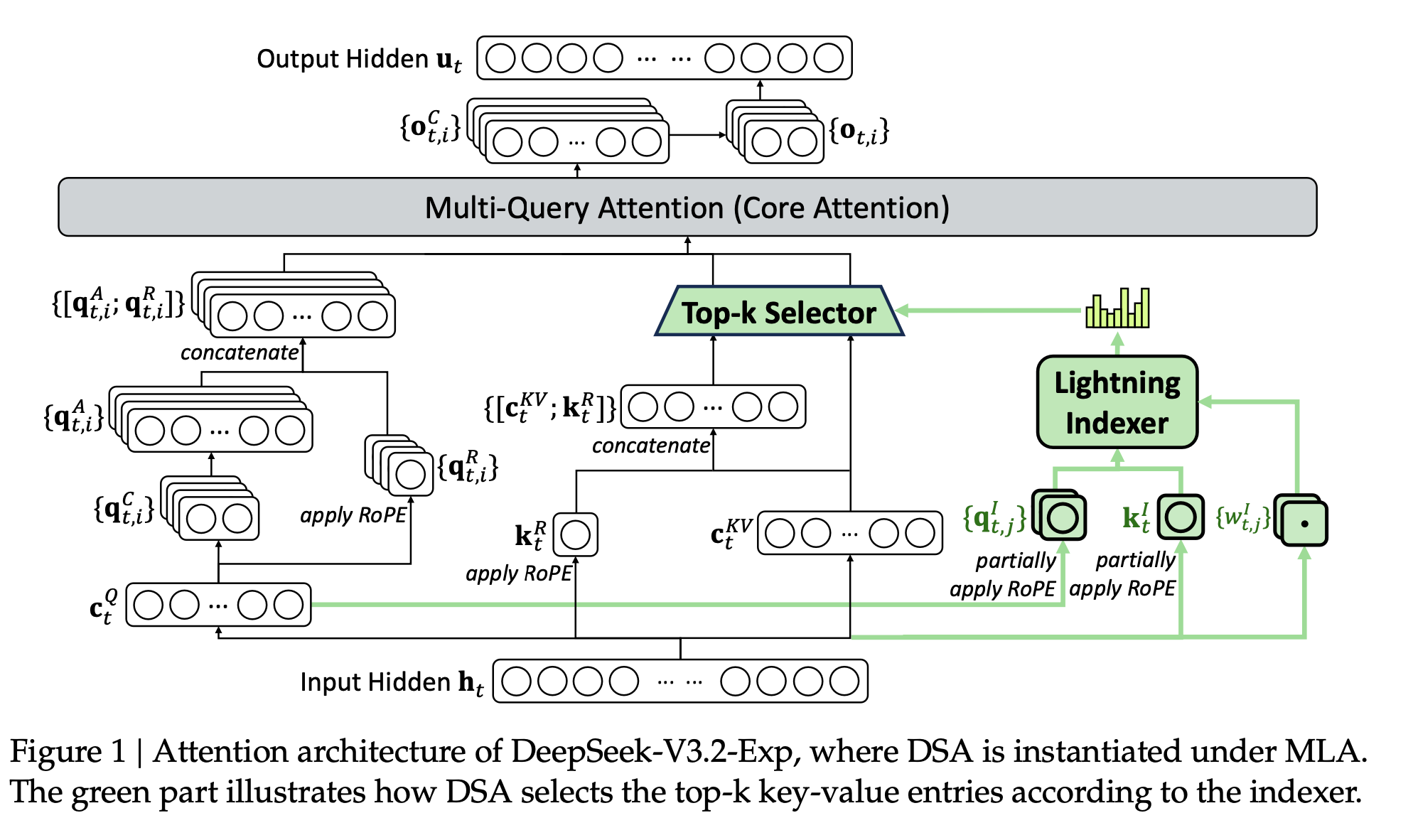
Fig.1 DeepSeek-V3.2-Exp 基于MLA的注意力架构图,其中绿色部分显示了DSA如何根据索引器选择top-k键值条目
1.3 DSA两大核心组件
1.闪电索引器(Lightning Indexer)
闪电索引器负责快速、高效地为每个查询(Query)从海量候选的键(Key)中,识别出最可能相关的 Top-k 个键。闪电索引器的核心目标是以极低的计算开销完成相关键的「海选」。其实现方式如下:
低维投影:将原始高维度的 Query 和 Key 向量,通过一个独立的、可学习的线性层投影到极低的维度(例如128维)。这使得后续的相似度计算变得异常高效。
高效相似度计算:使用低维投影后的向量 qI 和 kI 计算索引分数,这也是索引器的核心作用,也即为每个查询 token(query token)计算「与前文每个 token 的相关性得分」,即索引得分 Iₜ,ₛ,公式如下:

论文指出:选择 ReLU 激活函数的主要考量是其计算上的高吞吐量(throughput),因为与 Softmax 等需要全局归一化的函数相比,ReLU 仅需进行一次简单的阈值操作,计算成本低。
2.细粒度稀疏注意力(Fine-grained Sparse Attention)
基于索引器输出的分数,token选择机制仅保留 Top-k 索引分数对应的键值对(KV),再通过注意力机制计算最终输出 uₜ(仅基于这些筛选后的「关键键值对」计算注意力)。具体工作流程为:
1). 为每个查询token ht计算索引分数{𝐼𝑡,𝑠}
2). 选择 Top-k 索引分数对应的键值条目{𝑐𝑠}
3). 在稀疏选择的键值条目上应用注意力机制,公式如下:

复杂度降低:通过这一机制,核心注意力的计算复杂度从 O(L²) 成功降至 O(L*k)(其中 k 远小于 L),实现了计算量和内存访问的巨大节省。在 DeepSeek-V3.2-Exp 的训练中,k 值设为 2048;也就是说即使处理 128K 长度的文本,每个查询 token 也只需与 2048 个最相似的 token 计算注意力。
这种两阶段设计,既保证了筛选过程的高效率,又确保了最终注意力计算的高精度。
参考: https://www.gnn.club/?p=2729
参考: https://www.bilibili.com/video/BV1BYXRYWEMj
参考: https://www.cnblogs.com/CLTech/p/19134374

 浙公网安备 33010602011771号
浙公网安备 33010602011771号