

深度强化学习】Gumbel-Softmax:离散随机变量的重参数化(reparameterization)
转自:https://zhuanlan.zhihu.com/p/551255387
以DDPG为代表的确定性策略梯度算法只适用于连续动作空间的任务,为了让这些算法能够处理离散动作空间的任务,需要对其进行Gumbel-Softmax处理,这篇笔记将从强化学习的角度出发,对为什么需要以及怎么使用Gumbel-Softmax进行简单介绍。
回顾一下在强化学习中有两类策略梯度的估计方法:
【随机策略梯度定理】根据Sutton提出的 随机策略梯度定理,如果∇𝜃𝜋𝜃(𝑎∣𝑠)
存在,那么 随机策略的策略梯度可以计算为
∇𝜃𝐽(𝜋𝜃)=∫𝑆𝜌𝜋(𝑠)∫𝐴∇𝜃𝜋𝜃(𝑎∣𝑠)𝑄𝜋(𝑠,𝑎)d𝑎 d𝑠=𝐸𝑠∼𝜌𝜋,𝑎∼𝜋𝜃[∇𝜃log𝜋𝜃(𝑎∣𝑠)𝑄𝜋(𝑠,𝑎)]
【确定性策略梯度定理】根据David Silver提出的 确定性策略梯度定理,如果 ∇𝑎𝑄𝜇(𝑠,𝑎) 与 ∇𝜃𝜇𝜃(𝑠) 存在,那么确定性策略的策略梯度可以计算为
∇𝜃𝐽(𝜇𝜃)=∫𝑆𝜌𝜇(𝑠)∇𝜃𝜇𝜃(𝑠)∇𝑎𝑄𝜇(𝑠,𝑎)|𝑎=𝜇𝜃(𝑠)d𝑠=𝐸𝑠∼𝜌𝜇[∇𝜃𝜇𝜃(𝑠)∇𝑎𝑄𝜇(𝑠,𝑎)|𝑎=𝜇𝜃(𝑠)]=𝐸𝑠∼𝜌𝜇[∇𝜃𝑄𝜇(𝑠,𝑎)|𝑎=𝜇𝜃(𝑠)]
可以看出,确定性策略梯度与随机策略梯度的计算有很大的区别,随机策略梯度对应随机策略, 𝜋𝜃(𝑎|𝑠) 表示的是状态 𝑠 下智能体采取动作 𝑎 的概率,而确定性策略梯度对应的是确定性策略,𝜇𝜃(𝑠) 对应的即为智能体即将采取的动作 𝑎。
随机策略梯度定理存在的条件是 ∇𝜃𝜋𝜃(𝑎∣𝑠) 存在,也就是 𝜋𝜃(𝑎∣𝑠) 对 𝜃 可微,很显然,我们常见的,针对离散动作的类别(categorical)分布与针对连续动作的高斯分布,所对应的概率密度函数,都可以用神经网络进行参数化表示,对 𝜃 都是可微的,这也就是为什么基于随机策略梯度的算法(REINFORCE,PPO等)既能处理离散任务,也能处理离散任务。
确定性策略梯度定理存在的条件则是 ∇𝜃𝜇𝜃(𝑠) 存在,也就是动作 𝜇𝜃(𝑠) 本身对 𝜃 可微,对于连续动作的确定性策略,可以直接用一个参数为 𝜃 的神经网络拟合 𝜇𝜃(𝑠),再添加一个随机噪声探索,此时 ∇𝜃𝜇𝜃(𝑠) 是存在的。但是对于离散动作,我们无法用神经网络直接输出一个可导的离散变量。在神经网络中,为了输出离散值,一个通常的做法是先输出每个动作的logits,然后通过一个softmax层将其转化为每个动作的概率。此时我们可以直接采用 argmax 操作输出概率最大的动作,但这种方法:1. 无法对动作空间进行探索;2. argmax操作是不可导的,无法回传梯度。为了解决第一个动作探索的问题,可以根据softmax输出的概率值对动作进行 采样,然而采样这个操作同样是不可导的,因此同样不可行。
在上面两段描述中,我个人觉得比较难以理解的点是为什么随机策略中采样可导,而确定性策略中采样不可导。这是因为随机策略中只要求概率密度函数对 𝜃 可导,这跟采样本身是没有关系的,而在确定性策略中,要求的是动作本身对 𝜃 可导,如果引入了随机策略采样,那么采样就是得到动作的最后一步操作,因此被纳入了求梯度的过程,而采样本身又不可导,这就是为什么最初的确定性策略梯度只能用于确定性策略。
既然采样操作不可行,那怎么保证确定性策略的探索呢?这就涉及到了重参数化(Reparameterization)这一重要技巧,首先从比较常规的连续动作下的reparameterization进行介绍。
确定性策略梯度中连续变量的重参数化(Reparameterization)
在确定性策略梯度框架下,我们要求策略:1. 能够保证探索;2. 可导。为了保证探索,有两种常见的方法,一种是直接使用随机策略,但这涉及到采样的操作,不可导;另一种是在确定性策略上添加噪声。实际上确定性策略添加噪声之后相当于也是随机策略,只不过此时采样过程和梯度的计算图分离了,这样就保证了梯度的可求,这种方法实际上就隐含了重参数化(reparameterization)的思想。为了更加清楚地解释reparameterization的含义,接下来先用SAC来介绍reparameterization。
确定性策略梯度是针对确定性策略提出的,SAC沿用了DDPG的确定性策略思想,使用的却是随机策略,这实际上就是因为SAC用到了reparameterization的技巧。SAC中的随机策略 𝜋𝜃(𝑎|𝑠) 是一个均值为 𝜇𝜃𝜇 ,方差为 𝜎𝜃𝜎高斯分布,均值 𝜇𝜃𝜇 和方差 𝜎𝜃𝜎 均用神经网络表示,此时策略梯度的计算公式为(最大熵框架,详细推导见SAC)
∇𝜃𝐽(𝜋𝜃)=𝐸𝑠∼𝐷[𝐸𝑎∼𝜋𝜃[∇𝜃(𝛼log(𝜋𝜃(𝑎|𝑠))−𝑄(𝑠,𝑎))]]
很显然,这里有一个 𝑎∼𝜋𝜃 的采样操作,是没有办法对 𝜃 进行求导的。为此,SAC的作者提出将 𝑎 这样一个复杂的随机变量用一个简单的随机变量来表示,即用 𝑓𝜃(𝜖,𝑠) 来表示 𝑎,这里 𝜖 是服从 𝜖∼𝑁(0,1) 的标准高斯随机变量。具体而言,𝑎=𝑓𝜃(𝜖,𝑠)=𝜇𝜃𝜇⋅𝜖+𝜎𝜃𝜎,显然,此时 𝑎 仍然服从最初设定的均值为 𝜇𝜃𝜇,方差为 𝜎𝜃𝜎 的高斯分布 𝜋𝜃(𝑎|𝑠),也就是说,reparameterization不会改变随机变量原本的分布。这么做有什么用呢?让我们继续对梯度进行推导:
∇𝜃𝐽(𝜋𝜃)=𝐸𝑠∼𝐷[𝐸𝑎∼𝜋𝜃[∇𝜃(𝛼log(𝜋𝜃(𝑎|𝑠))−𝑄(𝑠,𝑎))]]=𝐸𝑠∼𝐷[𝐸𝜖∼𝑁[∇𝜃(𝛼log(𝜋𝜃(𝑓𝜃(𝜖,𝑠)|𝑠))−𝑄(𝑠,𝑓𝜃(𝜖,𝑠)))]]=𝐸𝑠∼𝐷[𝐸𝜖∼𝑁[∇𝜃𝛼log(𝜋𝜃(𝑎|𝑠))+∇𝑎(𝛼log(𝜋𝜃(𝑎|𝑠))−𝑄(𝑠,𝑎))∇𝜃𝑓𝜃(𝜖,𝑠)]]
可以看出,原本我们需要从未知分布 𝜋𝜃(𝑎|𝑠) 进行采样,采样过程与参数 𝜃 有关,不可导,而通过reparameterization,我们只需要从已有的分布 𝑁(0,1) 进行采样, 采样的过程不再与 𝜃 有关,因此不会被包含进梯度的计算中,此时我们就可以直接根据链式法则对梯度进行计算了!!简单来说,reparameterization实际上就是将随机性采样和计算图的构建剥离开来,从而避免了采样过程对梯度计算的干扰。
实际上,DDPG本身也采用了reparameterization,此时 𝑎=𝑓𝜃(𝜖,𝑠)=𝜇𝜃+𝜖⋅𝜎,因此 𝑎 服从均值为 𝜇𝜃,方差为 𝜎 的高斯分布,这里 𝜎 是超参数。因此,SAC和DDPG的思想没有本质区别,只不过是SAC引入了最大熵框架,能够自动调节动作的方差,探索能力更强,超参数更少,因而比DDPG稍微高级一点。
Gumbel-Softmax:离散变量的重参数化(Reparameterization)
上面介绍了针对连续高斯分布的reparameterization,那么针对离散变量的categorical分布要怎样进行reparameterization呢?从上面SAC和DDPG的例子可以看出,reparameterization有两个要求:1. 不改变原有概率分布;2. 可导。Gumbel-Softmax正符合了这两个要求。
在离散任务中,𝑎 是一个离散的随机变量,它对应 𝑘 个不同的动作,依据当前策略,每个动作的概率为 𝜋𝜃1,𝜋𝜃2,...,𝜋𝜃𝑘,所有动作的概率加起来为1。如果直接取概率最大值的动作或依据这些概率对动作进行采样,则均不可导。为此,我们首先引入一个服从Gumbel(0,1)分布的随机变量。
【Gumbel(0,1)分布】𝑔=−log(−log(𝜖)),其中 𝜖∼𝑈(0,1),𝑔 即服从Gumbel(0,1)分布。
根据原来的概率分布和Gumbel噪声可以构造一个Gumbel-Max随机变量:
【Gumbel-Max】𝑎=argmax𝑖(log(𝜋𝜃𝑖)+𝑔𝑖)。
可以看出,Gumbel-Max实际上就是一个reparameterization的过程,首先根据已有的Gumbe(0,1)分布采样得到噪声 𝑔𝑖,然后再结合随机策略得到的概率构造出Gumbe-Max随机变量,这样就将采样的过程从梯度的计算中分离开来了。
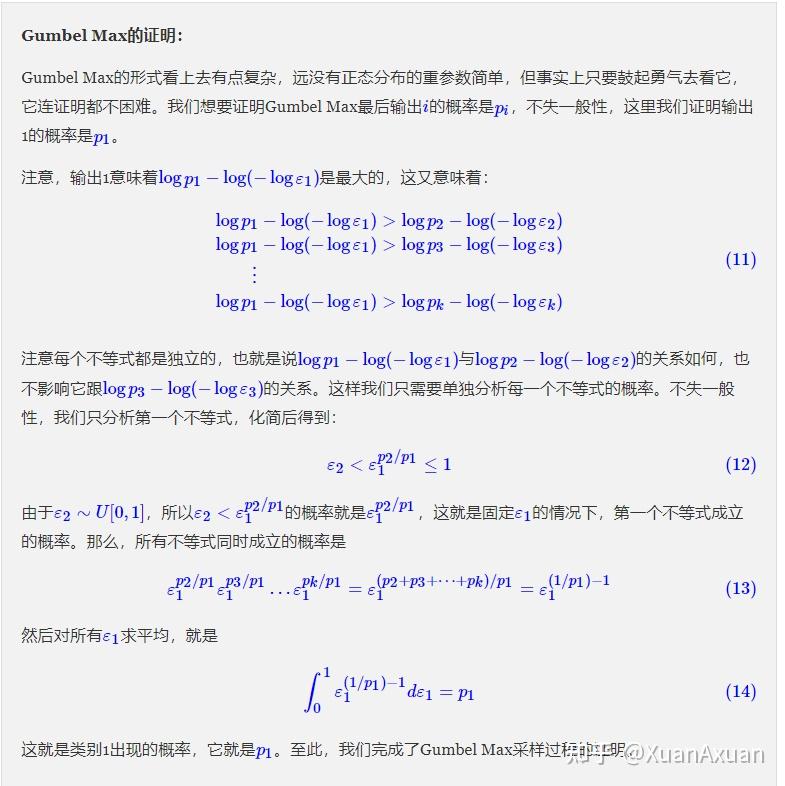
我们首先可以证明Gumbe-Max所得到得的随机变量服从原来的依据概率 𝜋𝜃1,𝜋𝜃2,...,𝜋𝜃𝑘 的分布(参考漫谈重参数:从正态分布到Gumbel Softmax - 科学空间|Scientific Spaces (kexue.fm)),因此满足了reparameterization的第一个条件。
然而,此时还是有一个 argmax 操作,因此还是不可导的。为此我们需要得到一个 argmax 的可导近似,实际上就是 softmax。在神经网络中,我们通常把离散变量写成one hot形式,例如3个离散动作表示成001,010,100。argmax 最终得到的实际上也是一个one hot(最大概率动作对应的onehot),而gumbel-softmax得到的就是one hot变量的一个连续近似。
【Gumbel-Softmax】softmax(log(𝜋𝜃𝑖)+𝑔𝑖),即
exp((log(𝜋𝜃𝑖)+𝑔𝑖)/𝜏)∑𝑗=1𝑘exp((log(𝜋𝜃𝑗)+𝑔𝑗)/𝜏) for 𝑖=1,…,𝑘
Gumbel-Softmax为每个离散动作得到了一个新的概率,举例来说,根据gumbel-softmax计算得到(0.997,0.001,0.002),此时这个值就对应着onehot向量100的近似。𝜏 是一个温度系数,𝜏 越小,输出结果就越接近one hot形式。
通过这样一个Gumbel-Softmax的操作,得到最终动作 𝑎 的过程就可导了。那么问题来了,此时所得到的gunbel-softmax变量虽然可导,但是是一个连续值,并非真正的one-hot变量。因此,在实际的操作中,我们在前传时,直接使用Gumbel-Max输出动作,但在梯度回传过程中,则采用Gumbel-Softmax来估计梯度。在代码中体现为:
# 利用.detach() 将gumbel-max操作从计算图分离开,再在计算图上增加gumbel-softmax操作,但实际的结果还是gumbel-max
a = (a_gumbel_max - a_gumbel_softmax).detach() + a_gumbel_softmax总结来说,通过Gumbel-Max,对采样过程进行了reparameterization,将采样从梯度的计算中剥离开来,然后通过在梯度过程用Gumbel-Softmax替代Gumbel-Max,进一步保证了梯度的可计算性。
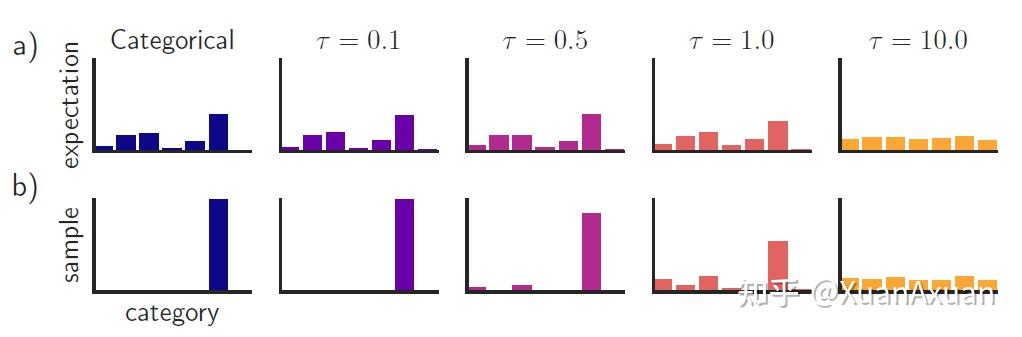
下面这幅图将原Categorical分布与Gumbel-Softmax分布进行了对比(只有第一列是Categorical分布),可以看出,当 𝜏 很小时,Gumbel-Softmax与原分布十分接近,采样得到的结果也与原分布相同,当 𝜏 比较大时,各个动作的概率就会趋近于相等。在实验中,需要对 𝜏 进行合理地选取。
MADDPG中的Gumbel-Softmax
根据FACMAC算法提供的代码,在MADDPG-discrete算法中,action的选择分为四种情况:
- 训练过程中的采样阶段:该阶段的作用主要是对各种不同动作进行探索,无需用到Gumbel-Softmax,此时动作的选择分为四步:
- step1:神经网络输出每个离散动作的logits
- step2:对logits进行softmax处理,得到每个动作的采样概率 𝜋𝑖
- step3:将采样概率 𝜋1,𝜋2,... 与对应均匀分布的采样概率加权求和,得到探索时的采样概率
- step4:依据上面求得的概率对动作采样
- 训练过程中的critic网络更新阶段:该阶段的作用是对critic网络进行更新,根据DDPG的critic更新公式,此时只需要利用target actor网络输出logits,然后根据该logits构造one-hot动作向量即可,也无需用到Gumbel-Softmax
- 训练过程中的actor网络更新阶段:该阶段的作用是对actor网络进行更新,需要对动作进行求导,因此需要用到Gumbel-Softmax,此时动作的选择分为四步:
- step1:神经网络输出每个离散动作的logits
- step2:计算得到logits对应的Gumbel-Softmax值
- step3:计算得到logits对应的Gumbel-Max值
- step4:利用
a = (a_gumbel_max - a_gumbel_softmax).detach() + a_gumbel_softmax输出one-hot向量,但保留Gumbel-Softmax的梯度 - 测试阶段:该阶段直接利用actor网络输出logits,然后根据该logits构造one-hot动作向量
在这种情况下,采集样本过程中对动作的采样过程和actor网络更新过程中的动作采样过程是不一样的。而在epymarl提供的代码中,探索阶段也是直接使用Gumbel-Softmax进行探索。我也不清楚哪种方法更加科学。
总结
其实Gumbel-Softmax是个蛮简单的操作,但背后的原理我一直没太搞明白,于是仔细学了一下,发现这和SAC里的reparameterization不是很相似吗?当时写SAC笔记的时候其实对reparameterization没太搞明白,昨天把这两个东西放在一起,发现就很好理解了,只不过一个是连续的,一个是离散的。理解了之后就想写下来,写完了发现有些地方还是很难表述清楚,大家凑合着看吧!!如果有不准确的地方欢迎在评论区指出来hhh

 浙公网安备 33010602011771号
浙公网安备 33010602011771号