

基于Linux的源代码
摘要:
本文为基于Linux 2.6.11源代码进行的有关进程部分的简单解析。
一、Linux下的进程
1.进程的定义
在进程模型中,计算机上所有可运行的软件,通常也包括操作系统,被组织成若干顺序进程(sequential process),简称进程(process)。操作系统中最核心的概念是进程, 进程也是并发程序设计中的一个最重要、 最基本的概念。进程是一个动态的过程, 即进程有生命周期, 它拥有资源, 是程序的执行过程, 其状态是变化的。
2.为什么要引入进程
1.理论角度看,是对正在运行的程序过程的抽象;2..实现角度看,是一种数据结构,目的在于清晰地刻画动态系统的内在规律,有效管理和调度进入计算机系统主存储器运行的程序。
一个计算机系统进程包括(或者说“拥有”)下列数据:那个程序的可运行机器码的一个在存储器的映像。 分配到的存储器(通常包括虚拟内存的一个区域)。存储器的内容包括可运行代码、特定于进程的数据(输入、输出)、调用堆栈、堆栈(用于保存运行时运数中途产生的数据)。 分配给该进程的资源的操作系统描述符,诸如文件描述符(Unix术语)或文件句柄(Windows)、数据源和数据终端。 安全特性,诸如进程拥有者和进程的权限集(可以容许的操作)。 处理器状态(内文),诸如寄存器内容、物理存储器寻址等。当进程正在运行时,状态通常储存在寄存器,其他情况在存储器。
二、组织进程
struct task_struct { volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */ struct thread_info *thread_info; atomic_t usage; unsigned long flags; /* per process flags, defined below */ unsigned long ptrace; int lock_depth; /* Lock depth */ int prio, static_prio; struct list_head run_list; prio_array_t *array; unsigned long sleep_avg; unsigned long long timestamp, last_ran; int activated; unsigned long policy; cpumask_t cpus_allowed; unsigned int time_slice, first_time_slice; #ifdef CONFIG_SCHEDSTATS struct sched_info sched_info; #endif struct list_head tasks; /* * ptrace_list/ptrace_children forms the list of my children * that were stolen by a ptracer. */ struct list_head ptrace_children; struct list_head ptrace_list; struct mm_struct *mm, *active_mm; /* task state */ struct linux_binfmt *binfmt; long exit_state; int exit_code, exit_signal; int pdeath_signal; /* The signal sent when the parent dies */ /* ??? */ unsigned long personality; unsigned did_exec:1; pid_t pid; pid_t tgid; /* * pointers to (original) parent process, youngest child, younger sibling, * older sibling, respectively. (p->father can be replaced with * p->parent->pid) */ struct task_struct *real_parent; /* real parent process (when being debugged) */ struct task_struct *parent; /* parent process */ /* * children/sibling forms the list of my children plus the * tasks I'm ptracing. */ struct list_head children; /* list of my children */ struct list_head sibling; /* linkage in my parent's children list */ struct task_struct *group_leader; /* threadgroup leader */ /* PID/PID hash table linkage. */ struct pid pids[PIDTYPE_MAX]; struct completion *vfork_done; /* for vfork() */ int __user *set_child_tid; /* CLONE_CHILD_SETTID */ int __user *clear_child_tid; /* CLONE_CHILD_CLEARTID */ unsigned long rt_priority; unsigned long it_real_value, it_real_incr; cputime_t it_virt_value, it_virt_incr; cputime_t it_prof_value, it_prof_incr; struct timer_list real_timer; cputime_t utime, stime; unsigned long nvcsw, nivcsw; /* context switch counts */ struct timespec start_time; /* mm fault and swap info: this can arguably be seen as either mm-specific or thread-specific */ unsigned long min_flt, maj_flt; /* process credentials */ uid_t uid,euid,suid,fsuid; gid_t gid,egid,sgid,fsgid; struct group_info *group_info; kernel_cap_t cap_effective, cap_inheritable, cap_permitted; unsigned keep_capabilities:1; struct user_struct *user; #ifdef CONFIG_KEYS struct key *session_keyring; /* keyring inherited over fork */ struct key *process_keyring; /* keyring private to this process (CLONE_THREAD) */ struct key *thread_keyring; /* keyring private to this thread */ #endif int oomkilladj; /* OOM kill score adjustment (bit shift). */ char comm[TASK_COMM_LEN]; /* file system info */ int link_count, total_link_count; /* ipc stuff */ struct sysv_sem sysvsem; /* CPU-specific state of this task */ struct thread_struct thread; /* filesystem information */ struct fs_struct *fs; /* open file information */ struct files_struct *files; /* namespace */ struct namespace *namespace; /* signal handlers */ struct signal_struct *signal; struct sighand_struct *sighand; sigset_t blocked, real_blocked; struct sigpending pending; unsigned long sas_ss_sp; size_t sas_ss_size; int (*notifier)(void *priv); void *notifier_data; sigset_t *notifier_mask; void *security; struct audit_context *audit_context; /* Thread group tracking */ u32 parent_exec_id; u32 self_exec_id; /* Protection of (de-)allocation: mm, files, fs, tty, keyrings */ spinlock_t alloc_lock; /* Protection of proc_dentry: nesting proc_lock, dcache_lock, write_lock_irq(&tasklist_lock); */ spinlock_t proc_lock; /* context-switch lock */ spinlock_t switch_lock; /* journalling filesystem info */ void *journal_info; /* VM state */ struct reclaim_state *reclaim_state; struct dentry *proc_dentry; struct backing_dev_info *backing_dev_info; struct io_context *io_context; unsigned long ptrace_message; siginfo_t *last_siginfo; /* For ptrace use. */ /* * current io wait handle: wait queue entry to use for io waits * If this thread is processing aio, this points at the waitqueue * inside the currently handled kiocb. It may be NULL (i.e. default * to a stack based synchronous wait) if its doing sync IO. */ wait_queue_t *io_wait; /* i/o counters(bytes read/written, #syscalls */ u64 rchar, wchar, syscr, syscw; #if defined(CONFIG_BSD_PROCESS_ACCT) u64 acct_rss_mem1; /* accumulated rss usage */ u64 acct_vm_mem1; /* accumulated virtual memory usage */ clock_t acct_stimexpd; /* clock_t-converted stime since last update */ #endif #ifdef CONFIG_NUMA struct mempolicy *mempolicy; short il_next; #endif };
其中
- 1)unsigned short pid 为用户标识
(2)int pid 为进程标识
(3)int processor标识用户正在使用的CPU,以支持对称多处理机方式;
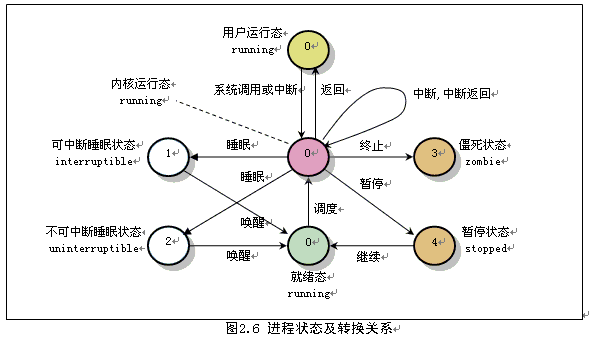
(4)volatile long state 标识进程的状态,可为下列六种状态之一:
可运行状态(TASK-RUNING);
可中断阻塞状态(TASK-UBERRUPTIBLE)
不可中断阻塞状态(TASK-UNINTERRUPTIBLE)
僵死状态(TASK-ZOMBLE)
暂停态(TASK_STOPPED)
交换态(TASK_SWAPPING)
(5)long prority表示进程的优先级
(6)unsigned long rt_prority 表示实时进程的优先级,对于普通进程无效
(7)long counter 为进程动态优先级计数器,用于进程轮转调度算法
(8)unsigned long policy 表示进程调度策略,其值为下列三种情况之一:
SCHED_OTHER(值为0)对应普通进程优先级轮转法(round robin)
SCHED_FIFO(值为1)对应实时进程先来先服务算法;
SCHED_RR(值为2)对应实时进程优先级轮转法
(9)struct task_struct *next_task,*prev_task为进程PCB双向链表的前后项指针
(10)struct task_struct *next_run,*prev_run为就绪队列双向链表的前后项指针(11)struct task_struct *p_opptr,*p_pptr,*p_cptr,*p_ysptr,*p_ptr指明进程家族间的关系,分别为指向祖父进程、父进程、子进程以及新老进程的指针。
- 1)unsigned short pid 为用户标识
2.进程的状态转换(网图侵删)
3.进程调度
__wait_event_interruptible_timeout(wq, condition, ret) \ do { \ DEFINE_WAIT(__wait); \ \ for (;;) { \ prepare_to_wait(&wq, &__wait, TASK_INTERRUPTIBLE); \ if (condition) \ break; \ if (!signal_pending(current)) { \ ret = schedule_timeout(ret); \ if (!ret) \ break; \ continue; \ } \ ret = -ERESTARTSYS; \ break; \ } \ finish_wait(&wq, &__wait); \ } while (0)
1、进程调度的时机
进程状态转换:
当前进程时间片用完
设备驱动程序运行时
从内核态返回到用户态
从中断或系统调用中返回;
进程重新允许抢占;
调用该函数为主动进入休眠。
调度程序运行时,要在所有处于可运行状态的进程中选择最值得运行的进程投入运行。
1.进程的调度策略(policy)
SCHED_NORMAL(SCHED_OTHER):普通的分时进程
SCHED_FIFO :先入先进的实时进程
SCHED_RR: 时间片轮转的实时进程
SCHED_BATCH:批处理进程,与普通进程不被抢占的情况类似
SCHED_IDLE:CPU空闲时,即SCHED_IDLE等级以外处于可执行状态的进程消失时,将被赋予执行权。也就是它将成为优先级最低的进程。
linux对调度策略定义如下:
#define SCHED_NORMAL 0 #define SCHED_FIFO 1
#define SCHED_RR 2
#define SCHED_BATCH 3 #define SCHED_IDLE 5
进程的调度算法:
1.先来先服务FCFS:该算法即可用于作业调度,也可用于进程调度
2.短作业优先/短进程优先 :SJF/ SPF :选择剩余时间最短的
3.优先权优先 FPF
4.时间片轮询法
4.对Linux进程模型的看法
一个优秀的系统无法脱离优秀的结构而存。作为一个开源的操作系统,Linux建立在许许多多志同道合的开发者的紧密合作之上。通过阅读代码,我们可以发现其书写的规范性和命名极强的可读性。也许这提醒了我们,在当前的环境下,多人协作并构筑出一个可行的标准是极其重要的。
参考材料:
https://elixir.bootlin.com/linux/v2.6.11/ident/sched_class
https://www.ibm.com/developerworks/cn/linux/l-task-killable/
https://www.cnblogs.com/ck1020/p/6089970.html
https://blog.csdn.net/shuizhilan/article/details/6642040
https://blog.csdn.net/kevin_hcy/article/details/6064518

 浙公网安备 33010602011771号
浙公网安备 33010602011771号