
OpenDroneMap (ODM) 无人机影像三维模型重建安装及应用快速上手
1 文档概述
本文档是指导用户从零开始,使用 OpenDroneMap 对无人机采集的影像数据进行处理,生成三维点云、数字表面模型(DSM)、正射影像图(Orthomosaic)等成果。
本文档的预期读者为拥有无人机航拍影像(JPG/PNG格式)并希望进行三维建模的用户。
2.1 系统运行环境要求
- 操作系统:Windows 10/11, macOS, 或 Linux (推荐 Ubuntu)。
- CPU:多核心处理器(4核以上推荐,8核或更多更佳)(处理200张以上影像建议16GB+)。
- 内存 (RAM):至少 16GB,处理大面积区域建议 32GB 或以上。
- 硬盘空间:预留充足的存储空间。原始影像、中间文件和最终成果会占用大量空间。建议准备 影像大小的10-20倍 的可用空间(例如,1GB影像需要10-20GB空间)。
- 显卡 (GPU):虽然ODM主要依赖CPU,但拥有支持CUDA的NVIDIA GPU可以显著加速某些步骤(如深度图计算)。AMD/Intel集成显卡也可运行,但速度较慢
2.2 数据准备
· 将无人机采集的所有照片集中存放在一个文件夹中。
· 确保照片包含GPS信息(EXIF中的GPS Latitude, GPS Longitude, GPS Altitude)。这是自动定位的关键。检查方式:右键图片查看属性,图片需要带有位置信息,如下图所示:

· 建议使用一致的拍摄设置(分辨率、焦距、光圈),重叠率建议:航向重叠70%-80%,旁向重叠60%-70%。
· 清理掉模糊、过曝或完全遮挡的照片。· 如果没有数据,可以参考官方提供的数据示例:比如使用aukerman数据:
https://github.com/OpenDroneMap/ODMdata
3. OMD安装部署
3.1 系统安装说明
3.1.1 手动安装(推荐)
下载地址:https://github.com/OpenDroneMap/ODM/releases

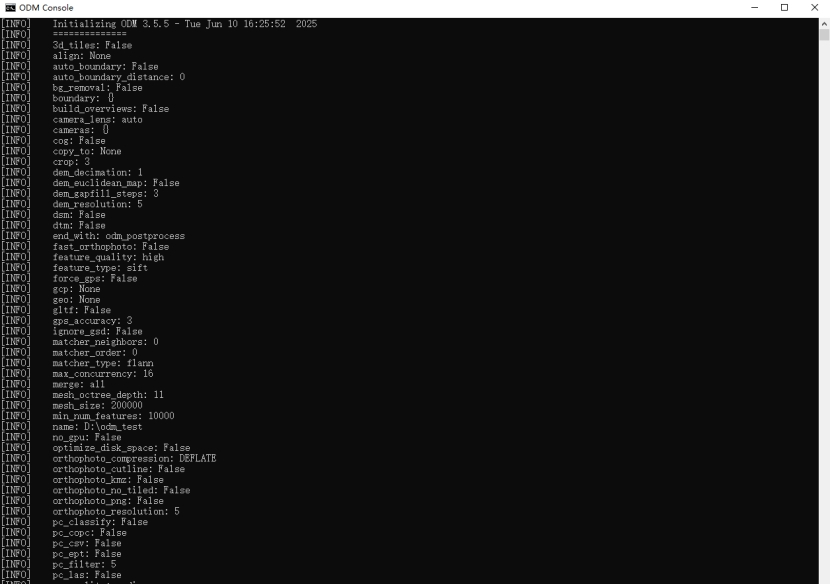
下载exe文件,双击安装运行,运行成功后出现ODM Console弹窗。
3.1.2 Docker安装指南
ODM推荐使用Docker容器化部署,避免复杂的依赖配置。以下是各操作系统的安装步骤(已安装Docker或者Dockerdesktop可以忽略安装部分,直接拉取镜像):
3.1.2.1 Windows系统
1、访问Docker Desktop官网下载安装程序:
https://www.docker.com/products/docker-desktop/
2、双击安装文件,启用"使用WSL 2而不是Hyper-V"选项
3、安装完成后启动Docker,等待系统托盘图标显示"Docker Desktop running"
3.1.2.2 macOS系统
使用Homebrew安装:brew install --cask docker
从应用程序文件夹启动Docker
首次运行需在系统偏好设置→安全性与隐私中允许开发者权限。
3.1.2.3 Linux系统
# Ubuntu/Debian示例
sudo apt-get update
sudo apt-get install docker-ce docker-ce-cli containerd.io
sudo usermod -aG docker $USER # 允许当前用户运行docker命令
newgrp docker # 无需重启即可应用用户组变更3.1.2.4 镜像包拉取
验证Docker是否安装成功:
docker --version # 应显示Docker version 20.10+拉取odm镜像
docker pull opendronemap/odm:latest中国用户可使用镜像加速服务:
docker pull registry.docker-cn.com/opendronemap/odm4. 系统使用说明
4.1 航拍照片处理
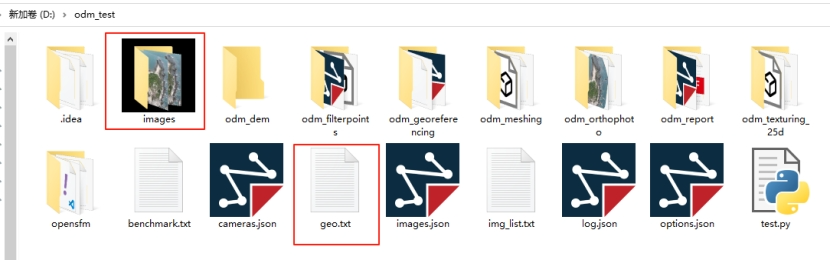
需要新建一个文件夹,并在里面建立一个images文件夹(存放要拼接的图片),图片需要自带GPS信息,(如果没有GPS信息,则需要用geo.txt文件存放图片的GPS信息)。

4.2 手动安装ODM执行(推荐)
在ODM Console弹窗中输入‘run --feature-type=sift --matcher-type=flann --skip-3dmodel D:\odm_test’ 运行,其中最后面‘D:\odm_tes’为存放照片的文件夹路径。
run --feature-type=sift --matcher-type=flann --skip-3dmodel D:\odm_test
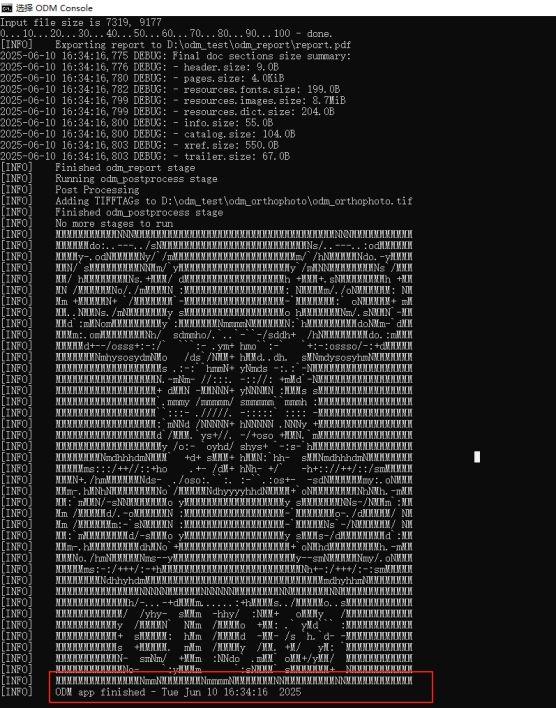
等待执行,(24张照片,我大概跑了10分钟)出现ODM app finished以下页面,则表示运行完毕。
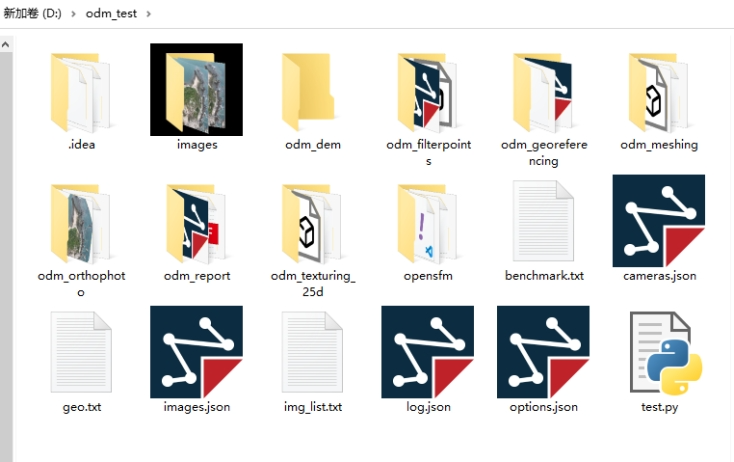
文件夹中,除了准备的images、geo.txt和test.py准备文件,剩下的都是生成的结果文件,按需选择相应的结果。使用meshlab软件查看ply文件,可以看到三维模型。
4.3 Docker版本ODM执行
4.3.1 基础重建命令详解
在终端中执行以下命令启动基础重建流程:
Linux/Mac示例
docker run -ti --rm -v ~/datasets:/datasets opendronemap/odm --project-path /datasets/my_projectWindows示例
docker run -ti --rm -v c:/datasets:/datasets opendronemap/odm --project-path /datasets/my_project命令参数解析:
-ti:启用交互式终端
--rm:处理完成后自动删除容器
-v:挂载本地目录到容器内(格式:本地路径:容器路径)
--project-path:指定项目根目录
my_project:项目名称(对应datasets下的文件夹)
执行命令后,ODM将显示实时进度,典型输出如下:
[INFO] Initializing ODM 3.1.9
[INFO] Maximum photo dimensions: 5472px
[INFO] Loading 120 images
[INFO] Found GPS coordinates in EXIF data
[INFO] Running OpenSfM reconstruction
[INFO] Feature matching complete (12456 features matched)
4.3.2 高级参数调优
根据项目需求添加参数可显著提升输出质量。以下是最常用的优化参数:
4.3.2.1 提高重建精度
生成数字表面模型(DSM)并提高正射影像分辨率至2cm/像素
docker run -ti --rm -v ~/datasets:/datasets opendronemap/odm --project-path /datasets/my_project --dsm --orthophoto-resolution 24.3.2.2 处理大型数据集
启用分块处理,限制内存使用
docker run -ti --rm -v ~/datasets:/datasets opendronemap/odm --project-path /datasets/my_project --split 100 --max-concurrency 44.3.2.3 GPU加速(需NVIDIA显卡)
使用GPU加速特征提取,处理速度提升2-3倍
docker run -ti --rm -v ~/datasets:/datasets --gpus all opendronemap/odm:gpu --project-path /datasets/my_project --use-gpu完整参数列表可通过docker run opendronemap/odm --help查看,常用参数速查表:

4.4 数据查看软件
4.4.1 正射影像与DEM查看(QGIS)
1. 下载安装
QGIS(国内用户建议使用OSGeo中国镜像)
2. 启动后点击"图层"→"添加图层"→"添加光栅图层"
3. 选择odm_orthophoto.tif文件,QGIS会自动识别地理坐标并定位
4.4.2 点云分析(CloudCompare)
1. 安装
2. 打开软件后拖拽odm_georeferenced_model.laz文件到窗口
3. 使用快捷键:
4. W:切换线框/实体显示
5. E:调整点大小
6. Ctrl+F:启用颜色映射,按高程着色
4.4.3 三维模型查看(MeshLab)
1. 安装
2. 打开odm_textured_model.obj文件
3. 右键点击模型→"渲染"→"纹理"启用纹理显示
5. 常见问题解决与性能优化
1. 影像重叠不足:确保前向重叠>70%,旁向>60%,解决方案:重新规划航线或使用--min-num-features 8000参数
2. 内存不足:处理200张以上影像需16GB+内存,临时解决方案:--downsample 0.5降低分辨率
3. GPS数据缺失:部分无人机未记录GPS,解决方案:添加--no-gps参数
4. 影像模糊:运动模糊会导致特征匹配失败,建议飞行速度
5. 光照变化大:拍摄时光照条件不一致,使用--use-3dmesh-texturing参数
6. 磁盘空间不足:单个项目需5-15GB空间,清理odm_texturing目录可释放临时文件
7. Docker权限问题:Linux用户需加入docker用户组,执行sudo usermod -aG docker $USER
8. 中文字符路径:所有文件夹和文件名不能包含中文
9. 相机参数异常:执行exiftool images/*.jpg检查焦距信息是否存在
10. 网络超时:首次运行需下载依赖,建议使用国内镜像或加速服务
6. 参考资料:
https://blog.csdn.net/gitblog_00189/article/details/151913607
https://segmentfault.com/a/1190000010612098

 浙公网安备 33010602011771号
浙公网安备 33010602011771号