《机器学习》第二次作业——第四章学习记录和心得
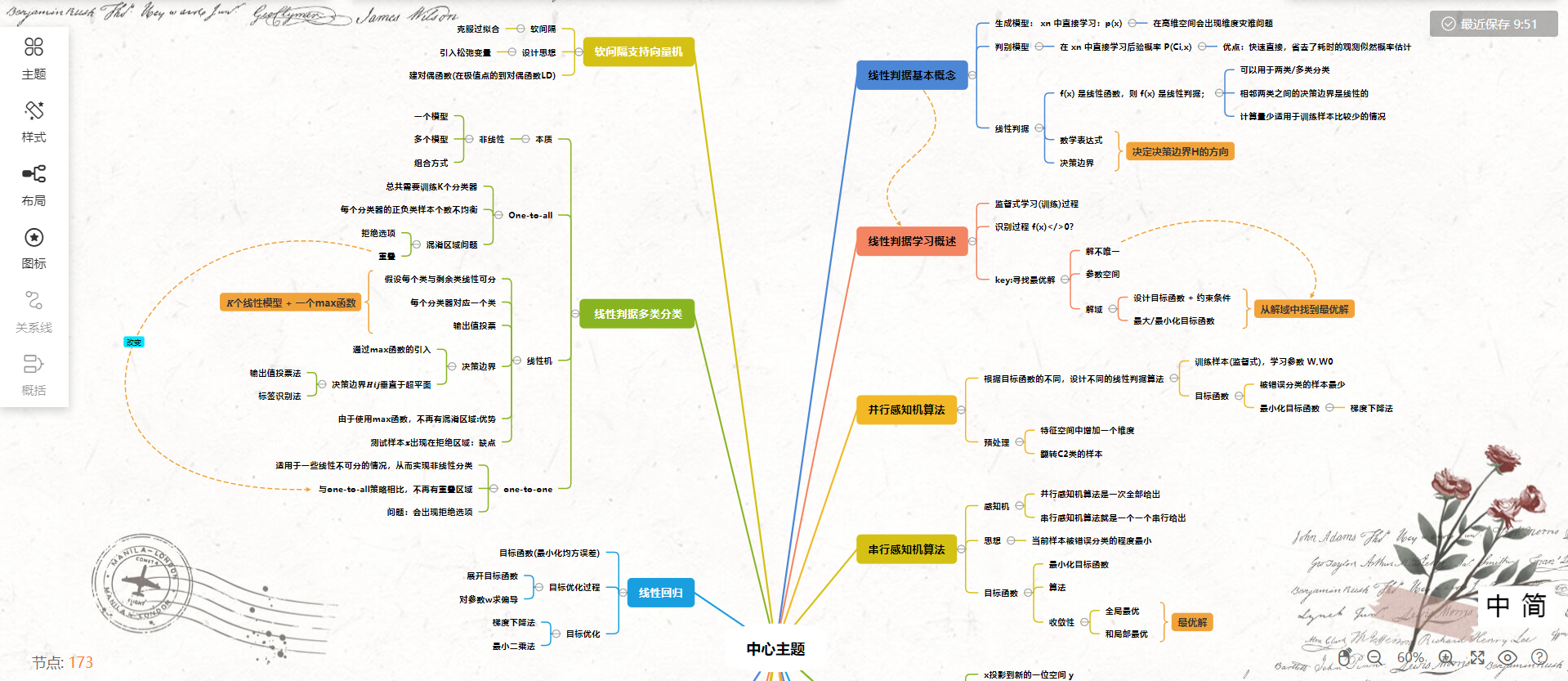
第四章 线性判据与回归
4.1 线性判据基本概念
1. 生成模型
在 \({x_n}\) 中直接学习:\({p(x)}\)
以贝叶斯为例:生成模型 ——(估计)——> 观测似然概率 ——+先验概率——> 联合概率 ——积分——> 边缘概率密度函数 P(x) ——> 后验概率 \(P(C_i, x)\)
缺点:在高维空间会出现维度灾难问题。
2. 判别模型
在 \({x_n}\) 中直接学习后验概率 \({P(C_i, x)}\)
优点:快速直接,省去了耗时的观测似然概率估计。
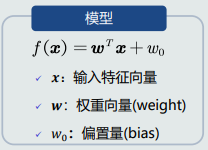
3. 线性判据
f(x) 是线性函数,则 f(x) 是线性判据;
- 可以用于两类/多类分类,相邻两类之间的决策边界是线性的。
- 计算量少,适用于训练样本比较少的情况。
数学表达:
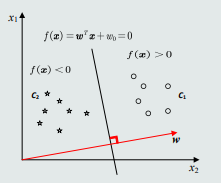
决策边界:
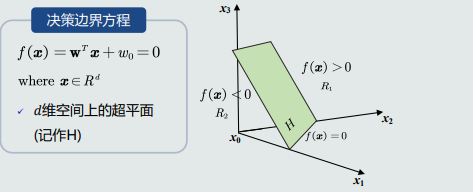
决策边界H,设W垂直于决策边界上的任何向量,为H的法向量;(作用:决定决策边界H的方向)
\(W_0\)的作用: - 决定了决策边界的偏移量,使其能够满足两个类输出值分被为正or负;
- 决定决策边界相对于坐标原点的位置;
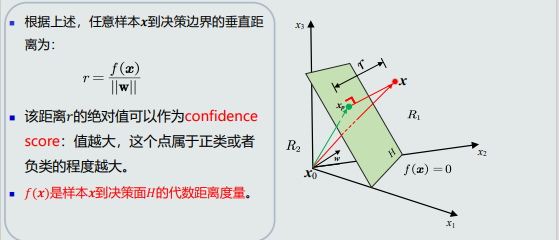
样本到决策边界的距离:
4.2 线性判据学习概述
- 监督式学习(训练)过程
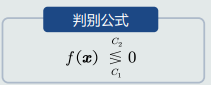
- 识别过程 \(f(x) < / > 0 ?\)
key:寻找最优解?
- 解不唯一;
- 参数空间&解域(从解域中找到最优解);
- 设计目标函数 + 约束条件(提高泛化能力)
- 最大/最小化目标函数
4.3 并行感知机算法
tips:(根据目标函数的不同,设计不同的线性判据算法)
目的:根据标记过的训练样本(监督式),学习参数 \(W , W_0\)
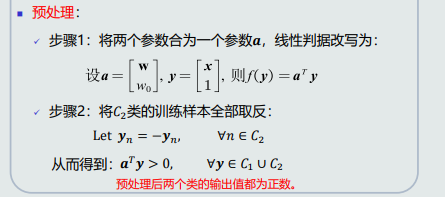
预处理:在特征空间中增加一个维度,是的决策边界可以通过原点; 翻转C2类的样本,是的所有样本处于该平面的同一侧。
目标函数:被错误分类的样本最少(输出值 \(f(x)\)是负数)。
???如何最小化目标函数?
* 求偏导:不可行,因为偏导不含有a;
* 梯度下降法 get√

4.4 串行感知机算法
如果说并行感知机算法是一次全部给出,那么串行感知机算法就是一个一个串行给出。
思想:当前样本被错误分类的程度最小。
目标函数:

最小化目标函数:仍然使用梯度下降法来求解a;
算法:初始步长——>迭代更新(可能遍历多次)——>停止迭代(所有训练样本的输出值都大于0)。
收敛性:收敛性只是保证算法会停止,但是无法保证最终的结果是最优的。(全局最优和局部最优)——>(如果目标函数是\(J(a)\)是凸函数,那么局部最优就是全局最优)。
步长与收敛:步长决定收敛的速度。
?question:当样本处于决策边缘的时候,对该样本的决策有很大的不确定性。
solve:加入Margin约束,提高泛化能力。(不再以0为标准,以b为标准)
最小化目标函数:求关于参数向量a的偏导。
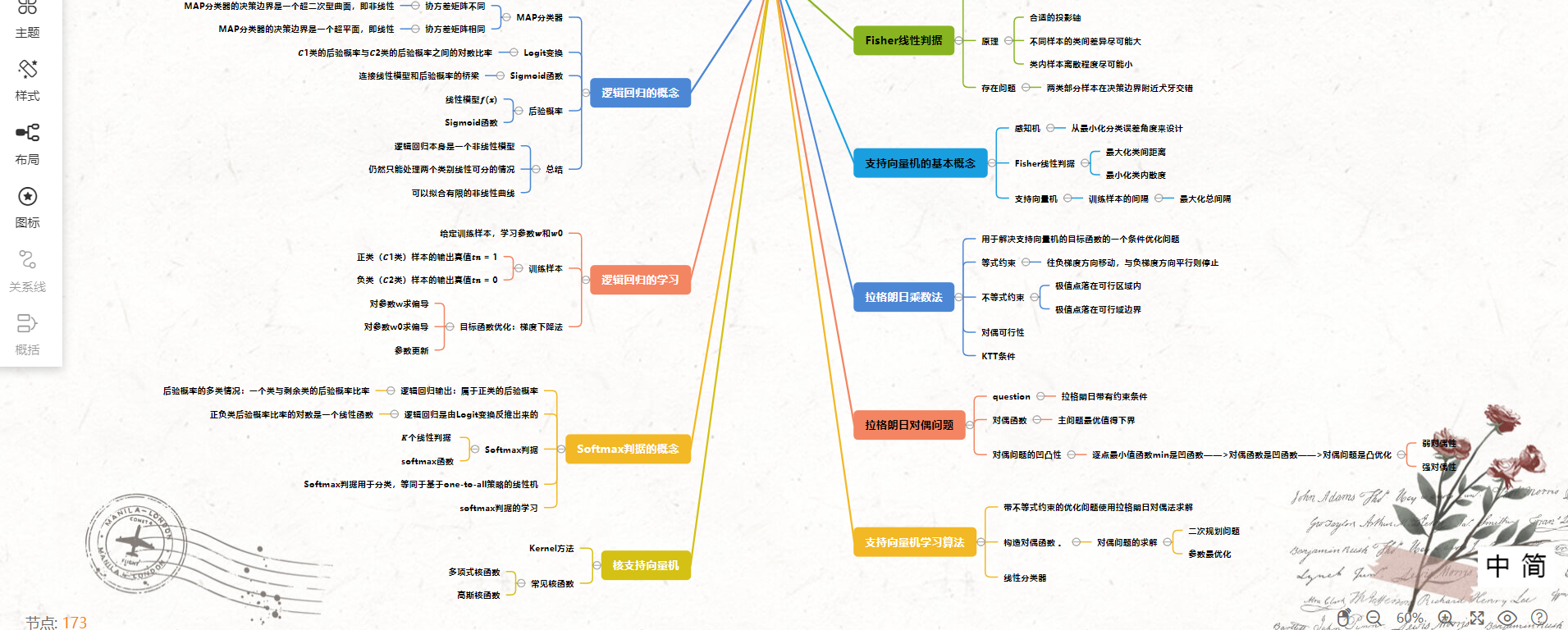
4.5 Fisher线性判据
把原空间各店x投影到新的一位空间 y.
\(y = w^T + w_0\)
原理:合适的投影轴(两个样本在该轴上的重叠尽可能少)
投影之后不同样本的类间差异尽可能大(均值之差),类内样本离散程度尽可能小(协方差矩阵)。

存在问题:两类部分样本在决策边界附近犬牙交错。
4.6 支持向量机的基本概念
different:感知机:从最小化分类误差角度来设计;
Fisher线性判据:最大化类间距离,最小化类内散度。
支持向量机:训练样本的间隔(最近的训练样本到决策边界之间的间隔)要大一些。
间隔定义:\(d_+ && d_-\)
间隔计算:

支持向量机(SVM):最大化总间隔。
4.7 拉格朗日乘数法
拉格朗日乘数法:用于解决支持向量机的目标函数的一个条件优化问题。
等式约束:f(x)的极值点\(x^*\)必须位于曲线g(x)=0上。
tips:往负梯度方向移动,与负梯度方向平行则停止。
不等式约束:
* 极值点落在可行区域内
* 直接通过(梯度)f(x)=0来获得极值点;
* 极值点落在可行域边界
对偶可行性:始终存在 (lambuda>=0),满足驻点条件。
KTT条件:最小化问题;多个约束问题。
4.8 拉格朗日对偶问题
??question:拉格朗日带有约束条件,如何优化求解?主问题难以求解或者是NP难问题。

主问题最优值得下界:对偶函数。

对偶问题的凹凸性:逐点最小值函数min是凹函数——>对偶函数是凹函数——>对偶问题是凸优化。
(弱对偶性;强对偶性)
4.9 支持向量机学习算法
带不等式约束的优化问题使用拉格朗日对偶法求解。
key:构造对偶函数 。
对偶问题的求解:二次规划问题+参数最优化。
决策过程:𝒘 和 𝑤0 的学习过程实际上是从训练样本中选择一组支持向量,并将这些支持向量存储下来,用作线性分类器。
4.10 软间隔支持向量机
软间隔:克服过拟合。
(可以将SVM的硬间隔(hard margin)放宽到软间隔(soft margin),允许一些训练样本出现在间隔区域内,从而具备一定的克服过拟合的能力)
设计思想:引入松弛变量。
分类器表示:

构建目标函数——>构建拉格朗日函数——>构建对偶函数(在极值点的到对偶函数\(L_D\))
4.11 线性判据多类分类
多类分类的本质:非线性
需要:
- 一个模型:能刻化非线性的决策边界。
- 多个模型:多个模型(线性/非线性)组合成非线性决策边界。
- 组合方式:并行组合、串行组合。
思路一:One-to-all
假设每个类与剩余类可分,总共需要训练K个分类器。
问题:每个分类器的正负类样本个数不均衡。
混淆区域问题:
* 拒绝选项
* 重叠。
思路二:线性机
- 假设:假设每个类与剩余类线性可分。
- 训练:基于one-to-all策略训练𝐾个线性分类器𝑓𝑖,每个分类器对应一个类𝐶𝑖。
- 决策:使用输出值投票法(max函数)给定测试样本𝒙,其属于所有分类器中输出值最大的那个类。
取输出值最大:该值最大表示属于该类的可能性越大。
线性机 = 𝐾个线性模型 + 一个max函数
决策边界:
- 通过max函数的引入,线性机将特征空间最终分为𝐾个决策区域。
- 决策边界𝐻𝑖𝑗垂直于超平面(𝒘𝑖 − 𝒘𝑗)
- 输出值投票法:使用两类权重𝒘向量的差值决定相邻两类之间的决策边界;
- 标签识别法:利用每一类的权重𝒘向量决定该类与剩余类之间的决策边界。
优势:由于使用max函数,不再有混淆区域(即拒绝区域和重叠区域)。通过划定相邻两类之间的边界,分割了重叠区域和拒绝区域。
问题:可能出现最大的𝑓𝑖(𝒙) ≤ 0,即测试样本𝒙出现在拒绝区域。如果严格按照线性判据的定义,拒绝区域其实是线性机(基于one-to-all策略)无法正确判断的区域。
思路三:one-to-one策略
针对每两个类𝐶𝑖 和𝐶𝑗 ,训练一个线性分类器:𝑓𝑖𝑗 𝒙 = 𝒘𝑖𝑗𝑇𝒙 + 𝑤0𝑖𝑗。𝐶𝑖类真值为正;𝐶𝑗类真值为负。总共需要训练𝐾(𝐾 − 1) /2个分类器。

优势:适用于一些线性不可分的情况,从而实现非线性分类。
与one-to-all策略相比,不再有重叠区域。
问题:会出现拒绝选项。
总结:
- 使用线性判据进行多类分类,本质上是利用多个线性模型组合而成一个非线性分类器。
- 因此,决策边界不再是由单个超平面决定,而是由多个超平面组合共同切割特征空间。
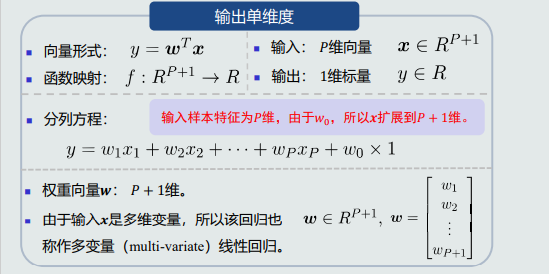
4.12 线性回归
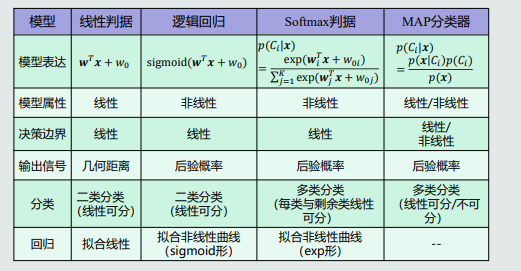
模型表达:
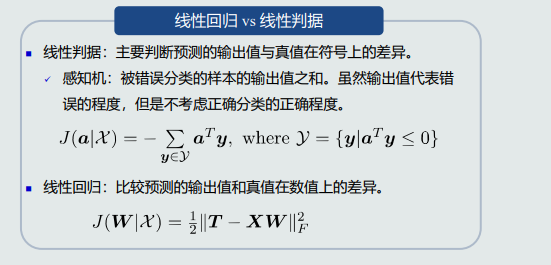
模型对比:

???线性回归模型如何学习?
待学习参数(给定学习样本学习参数w)——>给定N个训练样本——>目标函数(最小化均方误差)
目标函数的对比:
目标优化过程:
-
展开目标函数;
-
对参数w求偏导;
目标优化: -
梯度下降法;
-
最小二乘法;
关于线性回归的概率解释:
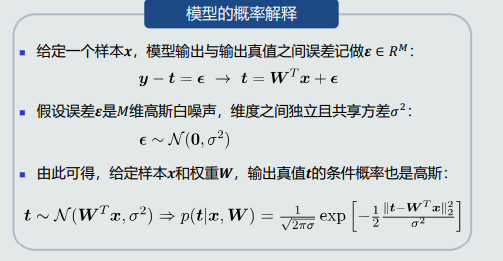
目标函数优化:
似然函数;
最大似然估计;
目标似然/MSE;(最大似然等同于最小化均方误差(MSE))
4.13 逻辑回归的概念
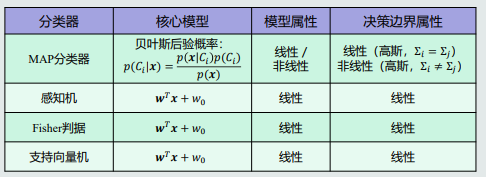
回顾:MAP分类器
如果两个类别数据分布的协方差矩阵不同(即Σ𝑖 ≠ Σ𝑗),则MAP分类器的决策边界是一个超二次型曲面,即非线性。
如果两个类别数据分布的协方差矩阵相同(即Σ𝑖 = Σ𝑗 ),则MAP分类器的决策边界是一个超平面,即线性。
Logit变换:
对于二类分类,MAP分类器通过比较后验概率的大小来决策。
Logit变换:𝐶1类的后验概率与𝐶2类的后验概率之间的对数比率。
在每类数据是高斯分布且协方差矩阵相同的情况下,由于Logit变换等同于线性判据的输出,所以在此情况下Logit(z) 是线性的。
Sigmoid函数:连接线性模型和后验概率的桥梁
线性模型𝑓(𝒙) + Sigmoid函数 = 后验概率
逻辑回归:线性模型𝑓(𝒙) + sigmoid函数。
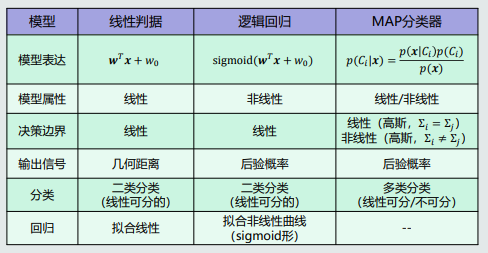
决策边界:单个逻辑回归可以用于二类分类;给定两个类,逻辑回归的决策边界仍然是线性的超平面。
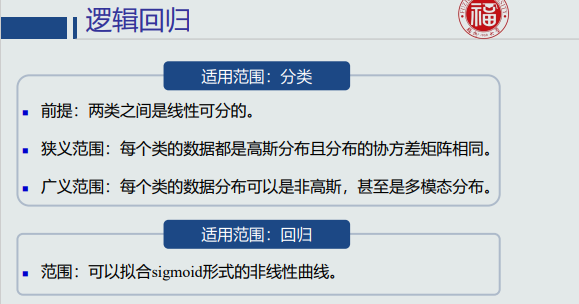
逻辑回归总结:
- 逻辑回归本身是一个非线性模型。
- 逻辑回归用于分类:仍然只能处理两个类别线性可分的情况。但是,sigmoid函数输出了后验概率,使得逻辑回归成为一个非线性模型。因此,逻辑回归比线性模型向前迈进了一步。
- 逻辑回归用于拟合:可以拟合有限的非线性曲线。
模型对比:
4.14 逻辑回归的学习
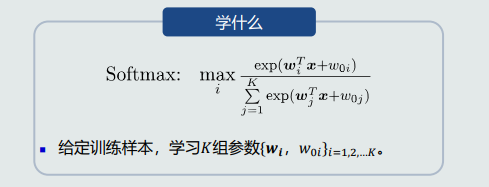
Key:给定训练样本,学习参数𝒘和𝑤0。
训练样本:
-
正类(𝐶1类)样本的输出真值𝑡𝑛 = 1;
-
负类(𝐶2类)样本的输出真值𝑡𝑛 = 0。
- 注意:这种真值取值方式与SVM不一样。
??如何设计目标函数呢?
最大似然估计法(给定单个输入样本𝒙,模型输出的类别标签𝑙可以看做一个随机变量。)
交叉熵解释:交叉熵可以用来度量两种分布的差异程度。
给定𝑁个训练样本,把每个训练样本的交叉熵求和,得到最终的目标函数:

目标函数优化:梯度下降法;
步骤:
- 注意:这种真值取值方式与SVM不一样。
-
对参数w求偏导;
-
对参数w0求偏导;
-
参数更新:采用梯度下降法更新w和w0;
需要额外注意:梯度小时问题;
key:迭代停止:如果迭代停止条件设为训练误差为0,或者所有训练样本都正确分类的时候才停止,则会出现过拟合问题。所以,在达到一定训练精度后,提前停止迭代,可以避免过拟合。
4.15 Softmax判据的概念
已知:逻辑回归输出:属于正类的后验概率
question:对于多类而言后验概率如何表达。
后验概率的多类情况:一个类与剩余类的后验概率比率。
-
逻辑回归是由Logit变换反推出来的。
-
由Logit变换可知:正负类后验概率比率的对数是一个线性函数。
-
分类𝐾个类,可以构建𝐾个线性判据。第𝑖个线性判据表示𝐶𝑖类与剩余类的分类边界,剩余类用一个参考负类(reference class) 𝐶𝐾来表达。
该后验概率的计算方法称为softmax函数;
Softmax判据:𝐾个线性判据 + softmax函数。
Softmax判据用于分类,等同于基于one-to-all策略的线性机。
总结: -
Softmax判据本身是一个非线性模型。
-
Softmax判据用于分类:只能处理多个类别、每个类别与剩余类线性可分的情况。但是, Softmax判据可以输出后验概率。因此,Softmax判据比基于one-to-all策略的线性机向前迈进了一步。
-
Softmax判据用于拟合:可以输出有限的非线性曲线。
模型对比:
4.16 softmax判据的学习
4.17 核支持向量机
Kernel方法的基本思想:如果样本在原始特征空间(𝑋空间)线性不可分,可以将这些样本通过一个函数𝜑映射到一个高维的特征空间(Φ空间),使得在这个高维空间,这些样本拥有一个线性分类边界。
常见核函数:
多项式核函数:

高斯核函数:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号